1.视频演示:
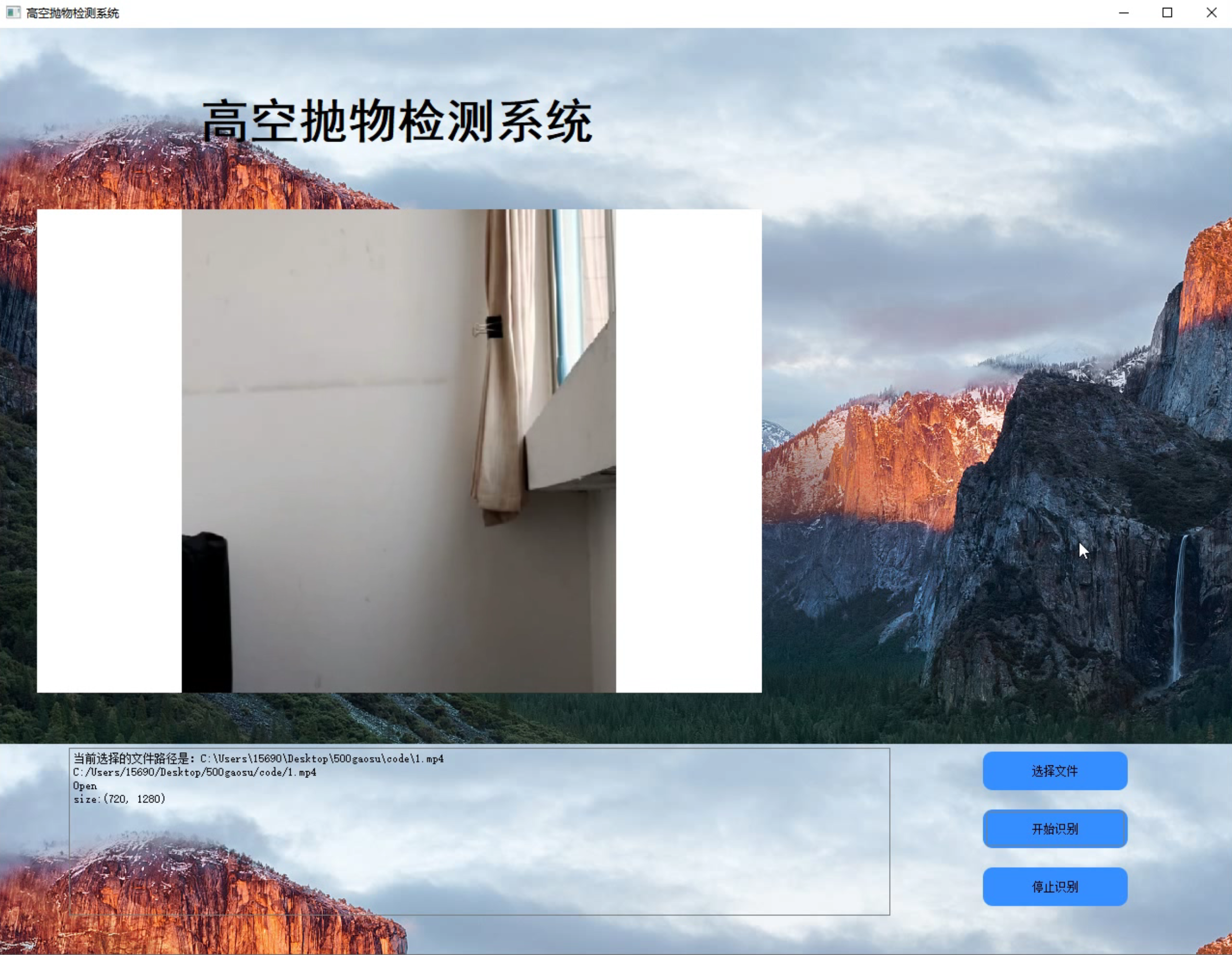
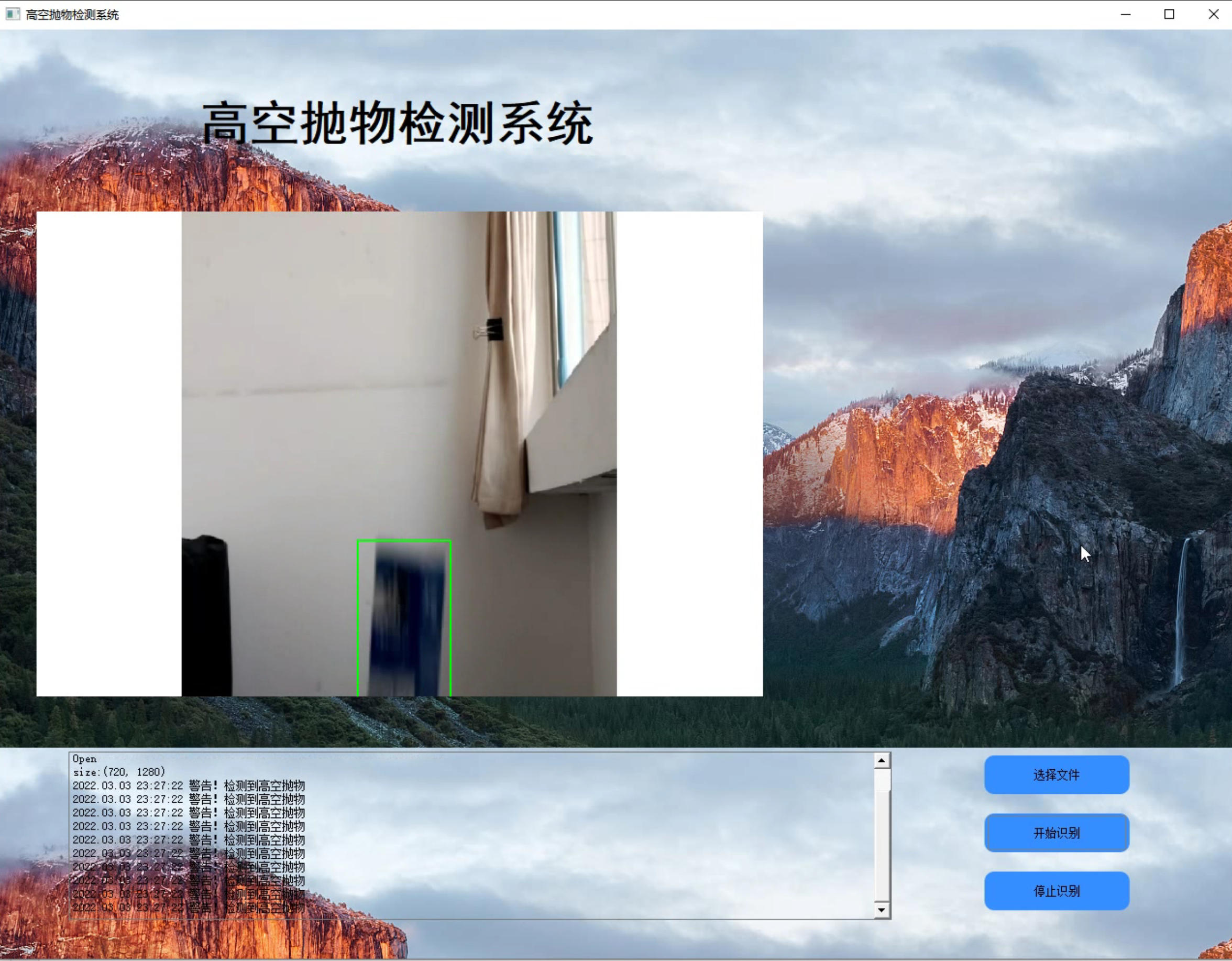
2.图片演示:
3.算法原理:
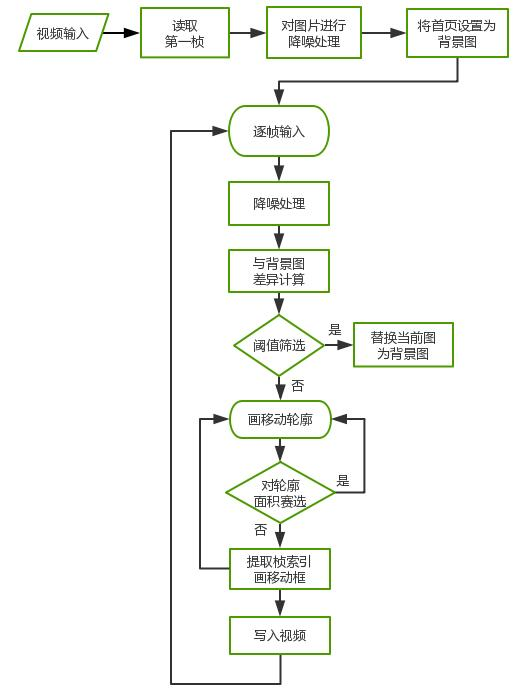
移动侦测即是根据视频每帧或者几帧之间像素的差异,对差异值设置阈值,筛选大于阈值的像素点,做掩模图即可选出视频中存在变化的桢。帧差法较为简单的视频中物体移动侦测,帧差法分为:单帧差、两桢差、和三桢差。随着帧数的增加是防止检测结果的重影。
帧间差分法(Temporal Difference)
由于场景中的目标在运动,目标的影像在不同图像帧中的位置不同。该类算法对时间上连续的两帧或三帧图像进行差分运算,不同帧对应的像素点相减,判断灰度差的绝对值,当绝对值超过一定阈值时,即可判断为运动目标,从而实现目标的检测功能。
4.算法流程图:
5.代码实现:
def threh(video,save_video,thres1,area_threh):
cam = cv2.VideoCapture(video)#打开一个视频
input_fps = cam.get(cv2.CAP_PROP_FPS)
ret_val, input_image = cam.read()
index=[]
images=[]
images.append(input_image)
video_length = int(cam.get(cv2.CAP_PROP_FRAME_COUNT))
input_image=cv2.resize(input_image,(512,512))
ending_frame = video_length
fourcc = cv2.VideoWriter_fourcc(*'XVID')
out = cv2.VideoWriter(save_video,fourcc, input_fps, (512, 512))
gray_lwpCV = cv2.cvtColor(input_image, cv2.COLOR_BGR2GRAY)
gray_lwpCV = cv2.GaussianBlur(gray_lwpCV, (21, 21), 0)
background=gray_lwpCV
# es = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (9, 4))
i = 0 # default is 0
outt=[]
while(cam.isOpened()) and ret_val == True and i <2999:
## if i % 2==1:
ret_val, input_image = cam.read()
input_image=cv2.resize(input_image,(512,512))
gray_lwpCV = cv2.cvtColor(input_image, cv2.COLOR_BGR2GRAY)
gray_lwpCV = cv2.GaussianBlur(gray_lwpCV, (21, 21), 0)
diff = cv2.absdiff(background, gray_lwpCV)
outt.append(diff)
#跟着图像变换背景
tem_diff=diff.flatten()
tem_ds=pd.Series(tem_diff)
tem_per=1-len(tem_ds[tem_ds==0])/len(tem_ds)
if (tem_per <0.2 )| (tem_per>0.75):
background=gray_lwpCV
else:
diff = cv2.threshold(diff, thres1, 255, cv2.THRESH_BINARY)[1]
ret,thresh = cv2.threshold(diff.copy(),150,255,0)
contours, hierarchy = cv2.findContours(thresh,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
# contours, hierarchy = cv2.findContours(diff.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for c in contours:
if (cv2.contourArea(c) < area_threh) | (cv2.contourArea(c) >int(512*512*0.3) ) : # 对于矩形区域,只显示大于给定阈值的轮廓(去除微小的变化等噪点)
continue
(x, y, w, h) = cv2.boundingRect(c) # 该函数计算矩形的边界框
cv2.rectangle(input_image, (x, y), (x+w, y+h), (0, 255, 0), 2)
index.append(i)
# cv2.imshow('contours', input_image)
# cv2.imshow('dis', diff)
out.write(input_image)
images.append(input_image)
i = i+1
out.release()
cam.release()
return outt,index,images```
##调取函数
outt=threh('new_video.mp4','test6.mp4',25,3000)
6.系统整合:

7.完整源码&环境部署视频教程&自定义UI界面:
8.参考文献:
- [1]论AI技术在高空抛物中的应用及解决方案[J]. 谢程晨,许言. 中国安全防范技术与应用. 2021(04)
- [2]一种端边云结合的高空抛物检测解决方案[J]. 王志芳,代翔. 中国安全防范技术与应用. 2021(04)
- [3]高空抛物监测系统关键技术及应用[J]. 王作文. 中国安全防范技术与应用. 2021(04)
- [4]高空抛物致人损害立法研究及启示[J]. 左中原. 法制博览. 2022(02)
- [5]《关于依法妥善审理高空抛物、坠物案件的意见》的理解与适用[J]. 姜启波,郭锋,陈龙业. 人民司法. 2020(16)
- [6]高空抛物现象产生的原因及防御对策[J]. 任玉梅. 法制博览. 2021(06)
- [7]合力保护“头顶上的安全”——浅谈高空抛物坠物的反思[J]. 李洛锋,叶政琴,谢玉婷. 法制博览. 2021(07)
- [8]高空抛物治理不妨多管齐下[J]. 刘言. 现代职业安全. 2021(03)
- [9]法律中高空抛物坠物行为的责任承担[J]. 刘丽霞. 法制博览. 2021(13)
- [10]高空抛物的多维度理解[J]. 刘春松. 法制博览. 2021(15)