前言
当然,风对你的旋翼飞机有很大的影响,会把它推来推去。然而,你可能也会发现,在自稳模式下飞行时,即使在无风的环境中,你的旋翼飞机也往往总是向同一方向漂移。这在很大程度上可以通过"Save Trim"或"Automatic Trim"功能进行纠正。
!Note
对于大多数用户来说,这个程序是没有必要的,因为加速度计校准(accelerometer calibration)可以很好地设置微调值。
1 保存微调
保存微调是比较简单的方法,主要是将你的无线电发射器的微调转移到自动驾驶仪上(video demo here)。
1. 在 MissionPlanner 的硬件 > 强制性硬件 > 无线电校准屏幕上检查你的 CH7 开关是否超过 1800。

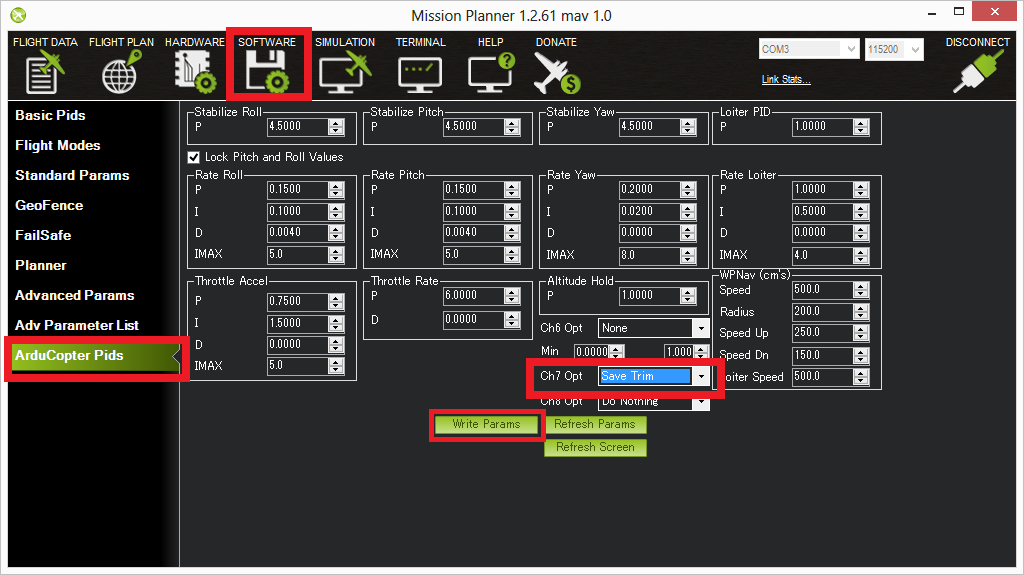
2. 在"软件" > "Copter Pids"屏幕上将 CH7 选项设置为 Save Trim,然后按"写入参数"按钮。
3. 当你的 CH7 开关在关闭位置时,在自稳模式下飞行你的旋翼飞机,并使用你的发射器的横滚和俯仰微调,使其飞行水平。
4. 降落并将油门调至零。
5. 松开横滚和俯仰杆,将 CH7 开关置于高位至少 1 秒钟。在 MP 的飞行数据屏幕的信息标签中应该出现"Trim saved"字样。
6. 将你发射器的横滚和俯仰调节器复位到中心,然后再飞,现在应该飞平了。如果它没有,请重复步骤 3、4 和 5。
2 自动微调
有了自动微调功能,当你在稳定的悬停状态下飞行时,横滚和俯仰微调被捕捉到。
1. 找到一个无风的环境,有足够的空间让你的旋翼飞机飞行而不至于撞到什么东西。
2. 将飞行器置于自稳模式。
3. 保持油门最低和方向舵向右 15 秒或直到你看到红色、蓝色和黄色的小 LED 灯循环闪烁。
4. 在稳定的悬停状态下,让你的旋翼飞机飞行约 25 秒。
5. 降落并将油门调至零,等待几秒钟(微调参数正在被保存)。
6. 在自稳模式下再次起飞,检查你的旋翼飞机现在是否飞得很平。如果没有,重复步骤 2、3 和 4。
!Note
你也可以在断开电池的情况下,在地面上测试以上这些程序是否可以操作。将你的自动驾驶仪连接到任务计划器上,在模拟完成上述步骤的过程中观察飞行数据屏幕。

!Note
你可以通过修改 AHRS_TRIM_X 和 AHRS_TRIM_Y 来手动设置微调。横滚微调是 AHRS_TRIM_X,俯仰微调是 AHRS_TRIM_Y。这两个值的单位都是弧度,左横滚和前倾都是负数。
!Note
几乎不可能摆脱所有的漂移,使你的旋翼飞机在没有任何输入的情况下保持完全不动。
3 保存微调和自动微调的视频演示
4 桌面方法
也可以通过设置飞行器水平,连接到任务规划器(也许是其他地面站)并选择初始设置、强制性硬件、加速校准并按下"校准水平"按钮来更新微调。
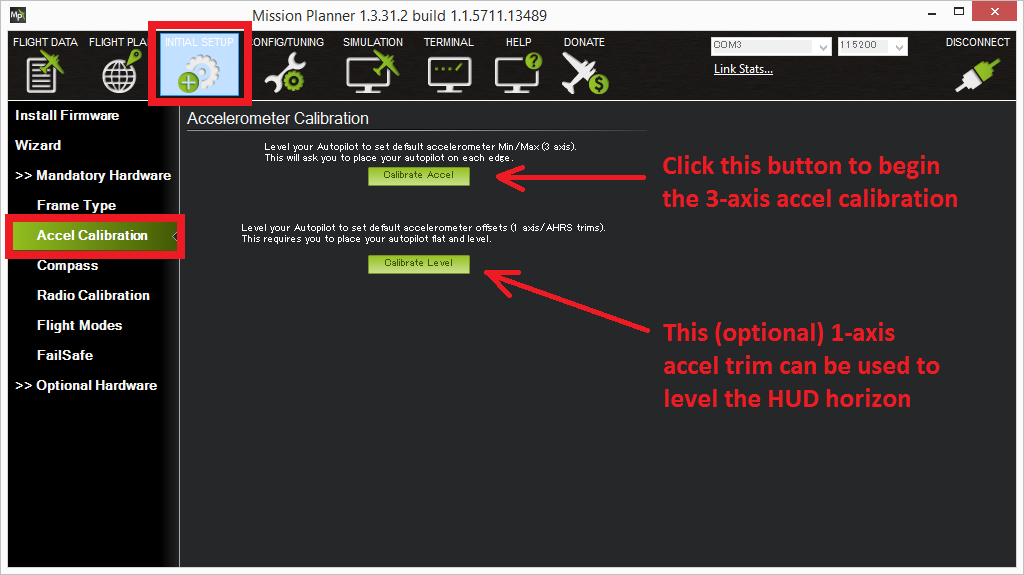
但请注意,当飞行器在地面上时,使 HUD 水平,并不一定意味着它在飞行时不会水平漂移,因为其他小的框架问题,包括飞行控制器在框架上不是完全水平的,以及稍微倾斜的电机。