本文主要介绍OLED屏显和汉字点阵编码原理,并在此基础上,使用STM32F103的SPI接口、AHT20温度传感器和OLED屏显,实现显示学号姓名、显示温湿度、长字符滑动显示。
一、任务要求
理解OLED屏显和汉字点阵编码原理,使用STM32F103的SPI或IIC接口实现以下功能:
(1)显示自己的学号和姓名;
(2)显示AHT20的温度和湿度;
(3)上下或左右的滑动显示长字符,比如“Hello,欢迎来到重庆交通大学物联网205实训室!”或者一段歌词或诗词(最好使用硬件刷屏模式)
二、OLED屏显
2.1、OLED屏显简介
OLED即有机发光二极管(Organic Light-Emitting Diode),又称为有机电激光显示(Organic Electroluminesence Display, OELD)。OLED 由于同时具备自发光,不需背光源、对比度高、厚度薄、视角广、反应速度快、可用于挠曲性面板、使用温度范围广、构造及制程较简单等优异之特性,被认为是下一代的平面显示器新兴应用技术。
LCD 都需要背光,而 OLED 不需要,因为它是自发光的。这样同样的显示,OLED 效果要来得好一些。以目前的技术,OLED 的尺寸还难以大型化,但是分辨率确可以做到很高。
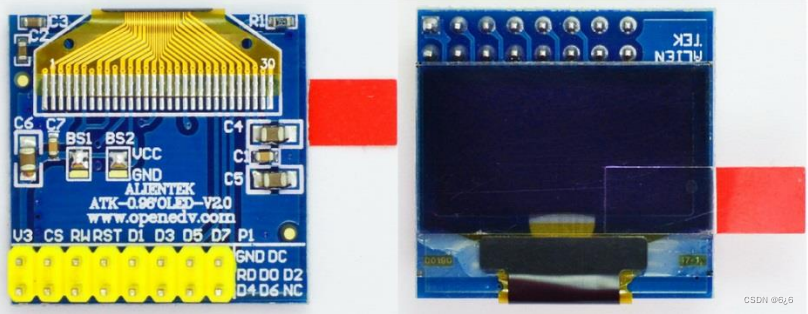
我们使用的是 ALINETEK 的 OLED 显示模块,该模块有以下特点:
- 模块有单色和双色两种可选,单色为纯蓝色,而双色则为黄蓝双色。
- 尺寸小,显示尺寸为 0.96 寸,而模块的尺寸仅为 27mmx26mm 大小。
- 高分辨率,该模块的分辨率为128x64。
- 多种接口方式,该模块提供了总共 5 种接口包括:6800、8080 两种并行接口方式、3线或 4 线的穿行 SPI 接口方式、IIC 接口方式(只需要 2 根线就可以控制 OLED 了)。
- 不需要高压,直接接 3.3V 就可以工作了。
注意:该模块不和 5.0V 接口兼容,使用的时候不要直接接到 5V 上去,否则可能烧坏模块
2.2、OLED分类
从器件结构上进行分类:
1、 单层器件
单层器件也就是在器件的正、负极之间接入一层可以发光的有机层,其结构为衬底/ITO/发光层/阴极。在这种结构中由于电子、空穴注入、传输不平衡,导致器件效率、亮度都较低,器件稳定性差
2、双层器件
双层器件是在单层器件的基础上,在发光层两侧加入空穴传输层(HTL)或电子传输层(ETL),克服了单层器件载流子注入不平衡的问题,改善了器件的电压-电流特性,提高了器件的发光效率
3、三层器件
三层器件结构是应用最广泛的一种结构,其结构为衬底/ITO/HTL/发光层/ETL/阴极。这种结构的优点是使激子被局限在发光层中,进而提高器件的效率
4、多层结构
多层结构的性能是比较好的一种结构,其能够很好的发挥各个层面的作用。发光层也可以由多层结构组成,由于各发机层之间相互独立,可以分别优化。因此,这种结构能充分发挥各有机层的作用,极大地提高了器件设计的灵活性
从驱动方式上进行分类:
1、一种是主动式,一种是被动式
2、主动式的一般为有源驱动,被动式的为无源驱动。在实际的应用过程中,有源驱动主要是用于高分辨率的产品,而无源驱动主要应用在显示器尺寸比较小的显示器中
从材料上进行分类:
1、可根据有机物的种类划分,一种为小分子,另一种是高分子
2、这两种器件的主要差别在制作工艺上,小分子器件主要采用的是真空热蒸发工艺,高分子器件采用的是旋转涂覆或者是喷涂印刷工艺
2.3、OLED的优势
- 1、相较于LED或LCD的晶体层,OLED的有机塑料层更薄、更轻而且更富于柔韧性
- 2、OLED的发光层比较轻:因此它的基层可使用富于柔韧性的材料,而不会使用刚性材料。OLED基层为塑料材质,而LED和LCD则使用玻璃基层
- 3、OLED比LED更亮:OLED有机层要比LED中与之对应的无机晶体层薄很多,因而OLED的导电层和发射层可以采用多层结构。此外,LED和LCD需要用玻璃作为支撑物,而玻璃会吸收一部分光线。OLED则无需使用玻璃
- 4、OLED并不需要采用LCD中的逆光系统:LCD工作时会选择性地阻挡某些逆光区域,从而让图像显现出来,而OLED则是靠自身发光。因为OLED不需逆光系统,所以它们的耗电量小于LCD(LCD所耗电量中的大部分用于逆光系统)。这一点对于靠电池供电的设备(例如移动电话)来说,尤其重要
- 5、OLED制造起来更加容易,还可制成较大的尺寸:OLED为塑胶材质,因此可以将其制作成大面积薄片状,而想要使用如此之多的晶体并把它们铺平,则要困难得多
- 6、OLED的视野范围很广,可达170度左右:而LCD工作时要阻挡光线,因而在某些角度上存在天然的观测障碍。OLED自身能够发光,所以视域范围也要宽很多
2.4、OLED屏显的特性
OLED技术之所以能够获得广泛的应用,在于其与其它技术相比,具有以下优点:
- 功耗低
- 响应速度快
- 较宽的视角
- 能实现高分辨率显示
- 宽温度特性
- OLED能够实现软屏
- OLED成品的质量比较轻
2.5、电路图以及接法
电路图:
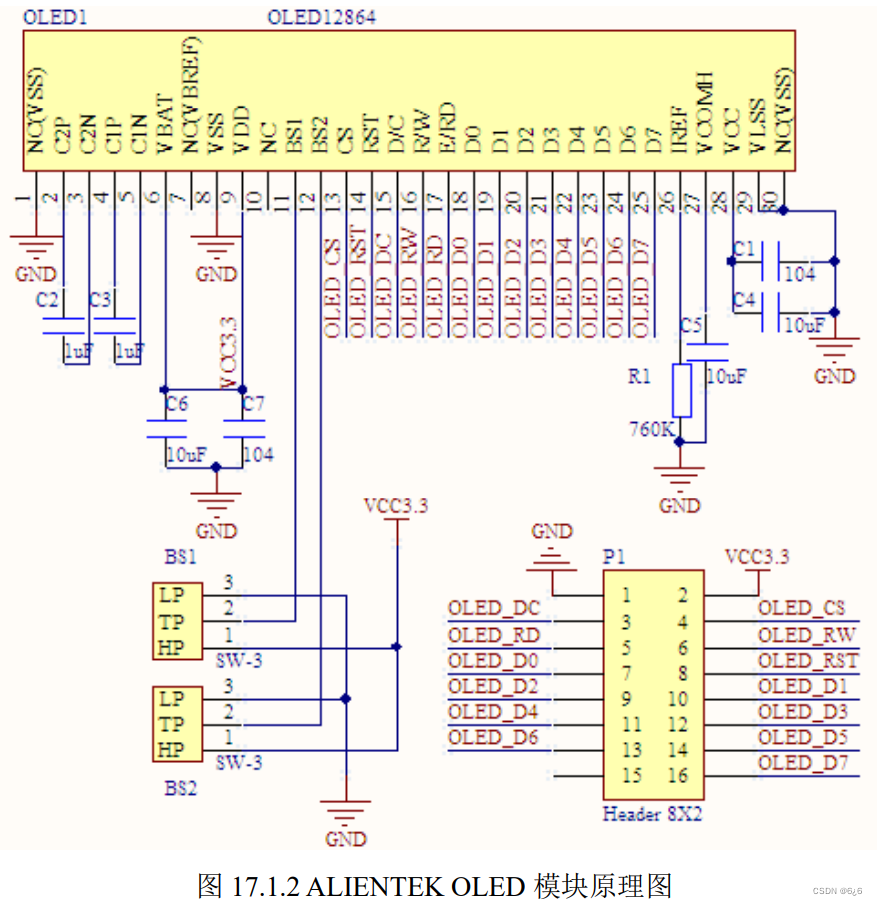
在下面实验中,将会采用七线OLED
参考厂家给出的Demo程序:0.96寸SPI_OLED模块配套资料包
百度网盘分享:
链接:https://pan.baidu.com/s/1kRSY2vH5Ycm527dE5tnvGw?pwd=2022
提取码:2022
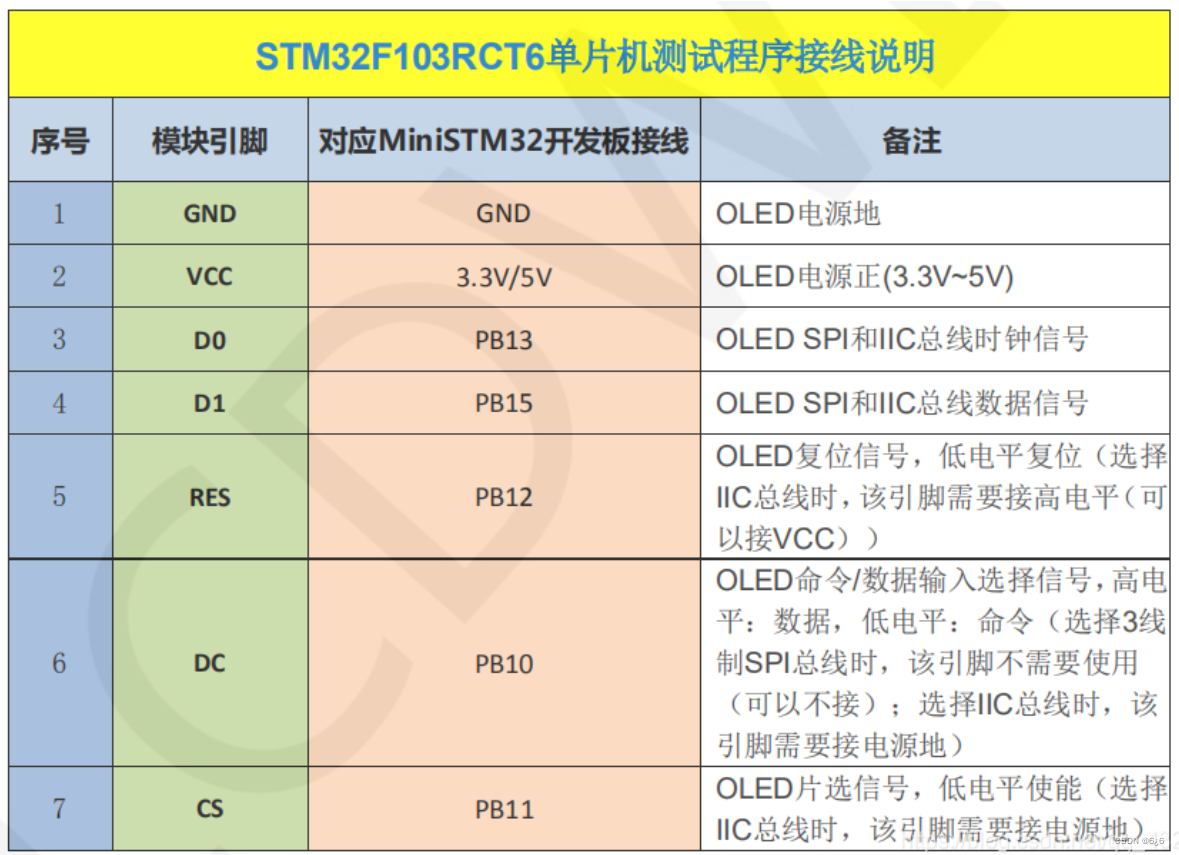
引脚介绍:
0.96寸OLED显示屏相关介绍可参考链接:
http://www.lcdwiki.com/zh/0.96inch_SPI_OLED_Module
三、汉字点阵简介
3.1、点阵概念
我们用之前的方法一个IO口只能控制一个led,如果需要用更少的IO口控制更多的led怎么办?于是,就有了点阵。
例如:8X8点阵共由64个发光二极管组成,且每个发光二极管是放置在行线和列线的交叉点上,当对应的某一行置1电平,某一列置0电平,则相应的二极管就亮;如要将第一个点点亮,则1脚接高电平a脚接低电平,则第一个点就亮了。
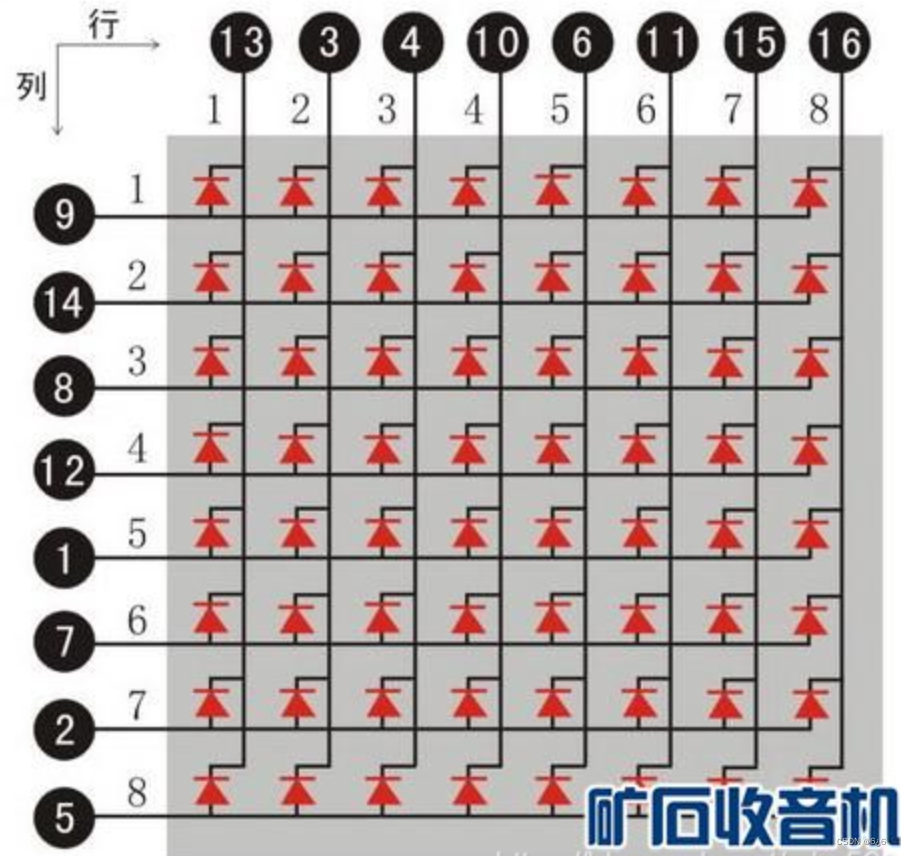
实物图
借助取模软件,即可将我们所需要的文字或字母,以点阵的形式呈现出来。
我们知道英文字母数量比较少,我们只要用一个字节(8位)就足以表达。但是汉字非常多。要怎么表达呢?
前人采用的一个方法就是把ASCII码的高128位作为汉字的内码,低128位仍然作为英文字母的内码,然后用两个字节来表示一个汉字。通过这个内码,我们可以获取汉字的字模信息。然后再根据这些字模的信息,把相应的汉字显示出来。
3.2、汉字编码
区位码
点阵字库其实就是按照汉字内码的顺序,把汉字的字模信息存起来。16×16的点阵字库有94区,每个区有94个汉字的字模。这样总的有94×94个汉字。
在国标 GD2312—80 中规定,所有的国标汉字及符号分配在一个 94 行、94 列的方阵中,方阵的每一行称为一个“区”,编号为 01 区到 94 区,每一列称为一个“位”,编号为01 位到 94 位,方阵中的每一个汉字和符号所在的区号和位号组合在一起形成的四个阿拉伯数字就是它们的“区位码”。
区位码的前两位是它的区号,后两位是它的位号。用区位码就可以唯一地确定一个汉字或符号。
机内码
汉字的机内码是指在计算机中表示一个汉字的编码。机内码与区位码稍有区别。
汉字区位码的区码和位码的取值均在 1-94 之间,如直接用区位码作为机内码,就会与基本 ASCII 码混淆。为了避免机内码与基本 ASCII 码的冲突,需要避开基本 ASCII 码中的控制码(00H~1FH),还需与基本 ASCII 码中的字符相区别。
因此:先在区码和位码分别加上 20H,在此基础上再加 80H。
(此处“H”表示前两位数字为十六进制数)
经过这些处理,用机内码表示一个汉字需要占两个字节,分别称为高位字节和低位字节,这两位字节的机内码按如下规则表示:
高位字节 = 区码 + 20H + 80H(或区码 + A0H)
低位字节 = 位码 + 20H + 80H(或位码 + AOH)
由于汉字的区码与位码的取值范围的十六进制数均为 01H-5EH(即十进制的 01-94),所以汉字的高位字节与低位字节的取值范围则为 A1H-FEH(即十进制的 161-254)。
例如,汉字“啊”的区位码为 1601,区码和位码分别用十六进制表示即为 1001H,它的机内码的高位字节为 B0H,低位字节为 A1H,机内码就是 B0A1H。
3.3、点阵字库存储
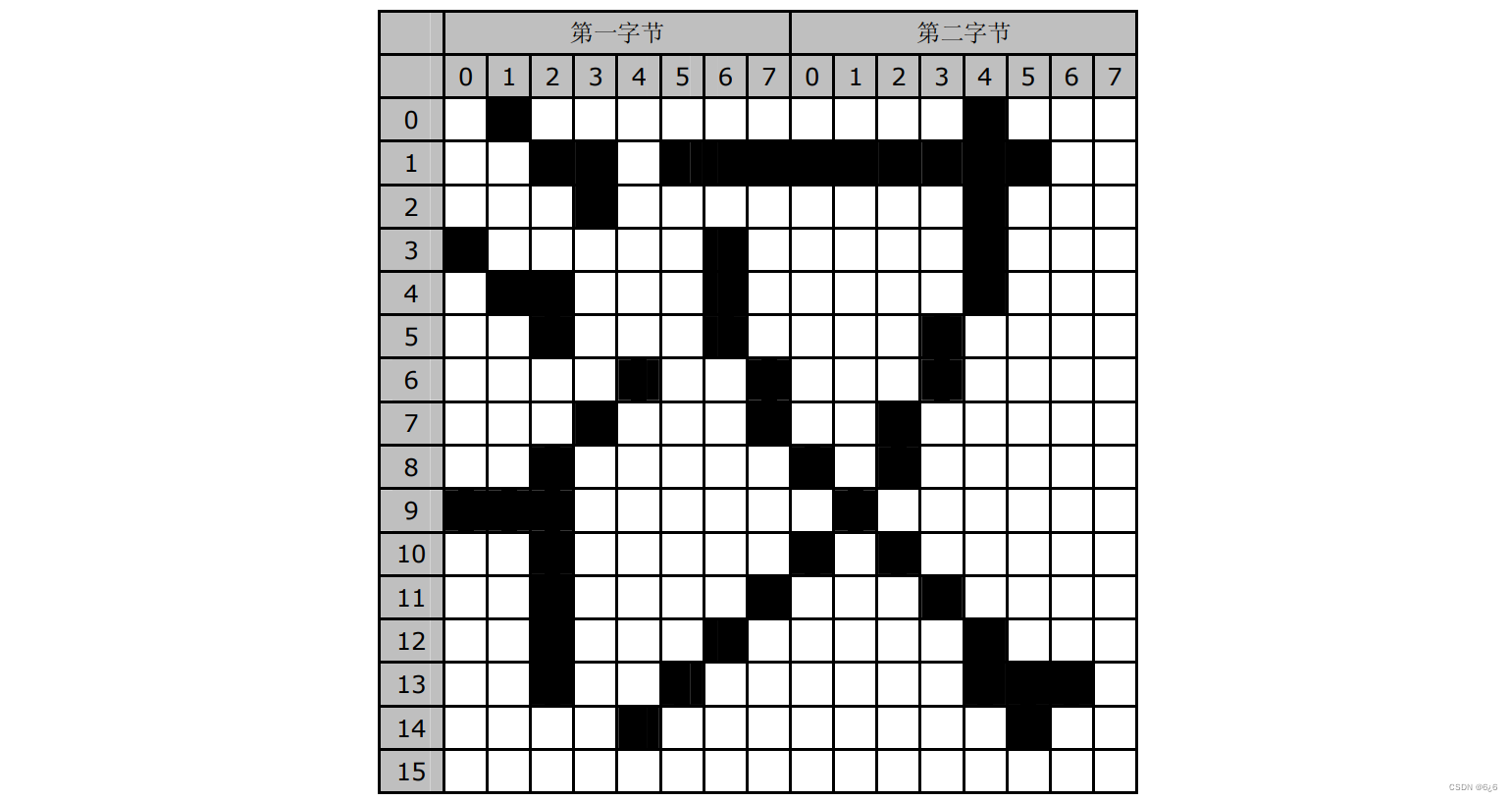
在汉字的点阵字库中,每个字节的每个位都代表一个汉字的一个点,每个汉字都是由一个矩形的点阵组成,0 代表没有,1 代表有点,将 0 和 1 分别用不同颜色画出,就形成了一个汉字。
字库根据字节所表示点的不同有分为 横向矩阵 和 纵向矩阵,目前多数的字库都是横向矩阵的存储方式(用得最多的应该是早期 UCDOS 字库),纵向矩阵一般是因为有某些液晶是采用纵向扫描显示法,为了提高显示速度,于是便把字库矩阵做成纵向。
之后所描述的都是指横向矩阵字库。
16*16点阵字库
对于 1616 的矩阵来说,它所需要的位数共是 1616=256 个位,每个字为 8 位,因此,每个汉字都需要用 256/8=32 个字节来表示。
每两个字节代表一行的 16 个点,共需要 16 行,显示汉字时,只需一次性读取 32 个字节,并将每两个字节为一行打印出来,即可形成一个汉字。
1414与1212点阵字库
对于 1414 和 1212 的字库,理论上计算,它们所需要的点阵分别为(1414/8)=25, (1212/8)=18 个字节,但是,如果按这种方式来存储,那么取点阵和显示时, 由于它们每一行都不是 8 的整位数 ,因此,就会涉到点阵的计算处理问题,会增加程序的复杂度,降低程序的效率。
为解决这个问题,有些点阵字库会将 1414 和 1212 的字库按 1614和 1612 来存储,即,每行还是按两个字节来存储,但是 1414 的字库,每两个字节的最后两位是没有使用,1212 的字节,每两字节的最后 4 位是没有使用,这个根据不同的字库会有不同的处理方式,所以在使用字库时要注意这个问题。
3.4、利用汉字机内码获取汉字
汉字的区位码和机内码的关系如下:
机内码高位字节 = 区码 + 20H + 80H(或区码 + A0H)
机内码低位字节 = 位码 + 20H + 80H(或位码 + AOH)
反过来说,我们也可以根据机内码来获得区位码:
区码 = 机内码高位字节 - A0H
位码 = 机内码低位字节 - AOH
这样,算出区位码之后,我们就可以用它在汉字库里面寻址找字模了。具体方式:
该汉字的偏移地址 =(区码-1)×94×一个字占用的字节数 + 位码×一个字占用的字节数
四、SPI通信协议
4.1、SPI通讯协议
SPI 是英语 Serial Peripheral interface 的缩写,顾名思义就是串行外围设备接口。是Motorola(摩托罗拉)首先在其MC68HCXX系列处理器上定义的。
SPI,是一种 高速的,全双工 ,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
SPI 是一个同步的数据总线,也就是说它是用 单独的数据线 和一个 单独的时钟信号 来保证发送端和接收端的完美同步。
时钟是一个振荡信号,它告诉接收端在确切的时机对数据线上的信号进行采样。
产生时钟的一侧称为 主机,另一侧称为 从机。总是 只有一个主机(一般来说可以是 微控制器/MCU),但是可以有多个 从机(后面详细介绍);
数据的采集时机可能是时钟信号的 上升沿(从低到高)或 下降沿(从高到低),具体要看对SPI的配置。
4.2、传输过程
整体的传输大概可以分为以下几个过程:
-
主机先将 NSS 信号拉低,这样保证开始接收数据;
-
当 接收端 检测到时钟的边沿信号时,它将立即读取数据线上的信号,这样就得到了一位数据(1bit);
由于时钟是随数据一起发送的,因此指定 数据的传输速度并不重要,尽管设备将具有可以运行的最高速度。
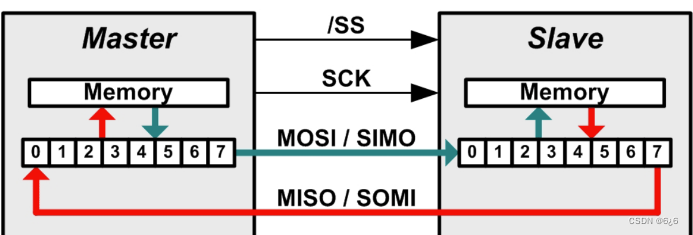
- 主机发送到从机时:主机产生相应的时钟信号,然后数据一位一位地将从 MOSI 信号线上进行发送到从机;
主机接收从机数据:如果从机需要将数据发送回主机,则主机将继续生成预定数量的时钟信号,并且从机会将数据通过 MISO 信号线发送;
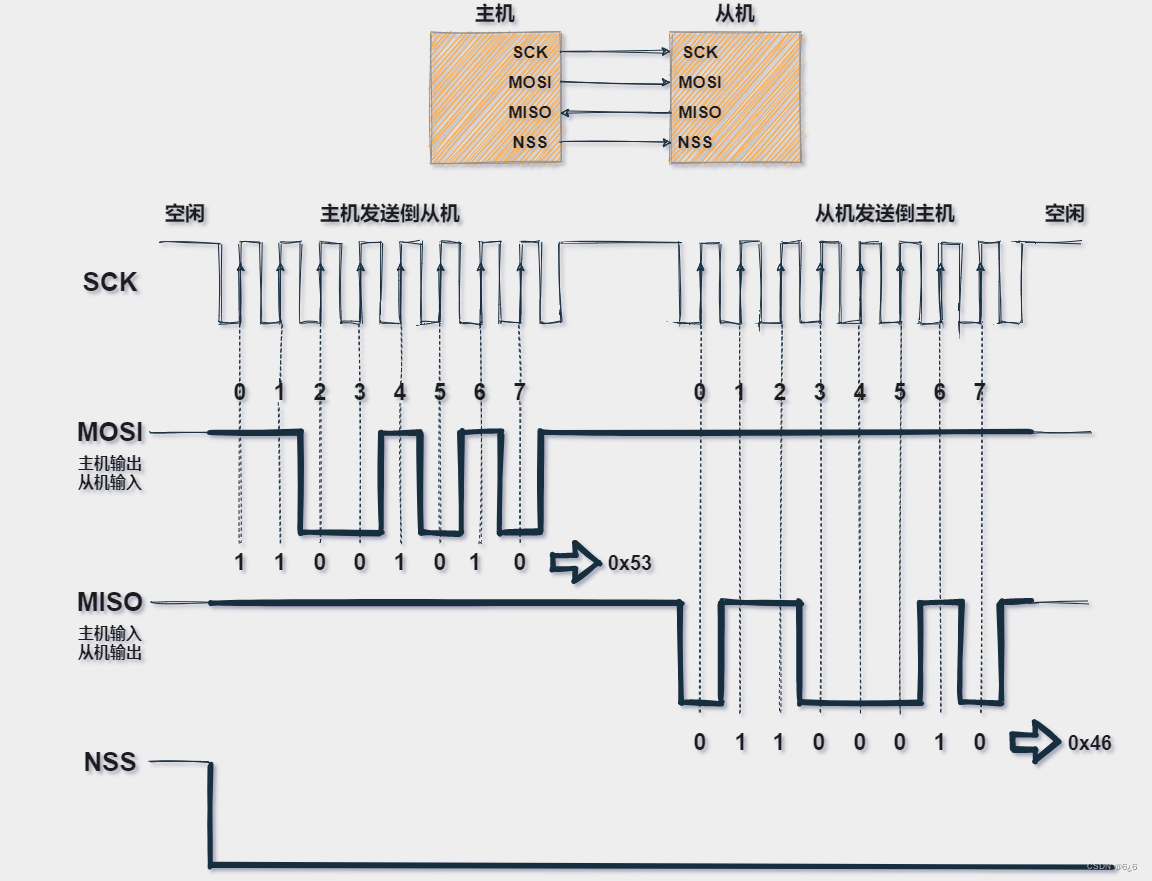
注意,SPI是“全双工”(具有单独的发送和接收线路),因此可以在同一时间发送和接收数据,另外SPI的接收硬件可以是一个简单的移位寄存器。这比异步串行通信所需的完整UART要简单得多,并且更加便宜;
4.3、SPI特性
SPI总线包括4条逻辑线,定义如下:
-
MISO:
Master input slave output主机输入,从机输出(数据来自从机); -
MOSI:
Master output slave input主机输出,从机输入(数据来自主机); -
SCLK :
Serial Clock串行时钟信号,由主机产生发送给从机; -
SS:
Slave Select片选信号,由主机发送,以控制与哪个从机通信,通常是低电平有效信号。
其他制造商可能会遵循其他命名规则,但是最终他们指的相同的含义。以下是一些常用术语;
-
MISO也可以是 SIMO,DOUT,DO,SDO 或 SO(在主机端)
-
MOSI也可以是 SOMI,DIN,DI,SDI 或 SI(在主机端)
-
NSS 也可以是 CE,CS 或 SSEL
-
SCLK 也可以是 SCK
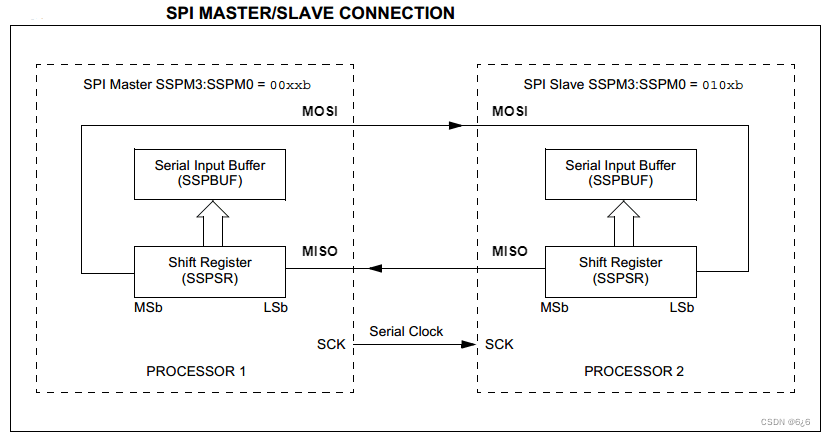
下图显示了单个主机和单个从机之间的典型SPI连接。
4.4、时钟
时钟频率
SPI总线上的主机必须在通信开始时候配置并生成相应的时钟信号。在每个SPI时钟周期内,都会发生 全双工数据传输。
主机在 MOSI 线上发送一位数据,从机读取它,而从机在 MISO 线上发送一位数据,主机读取它。
就算只进行单向的数据传输,也要保持这样的顺序。这就意味着无论接收任何数据,必须实际发送一些东西!在这种情况下,我们称其为虚拟数据;
从理论上讲,只要实际可行,时钟速率就可以是您想要的任何速率,当然这个速率受限于每个系统能提供多大的系统时钟频率,以及最大的SPI传输速率。
时钟极性 CKP/Clock Polarity
除了配置串行时钟速率(频率)外,SPI主设备还需要配置 时钟极性。
根据硬件制造商的命名规则不同,时钟极性通常写为 CKP 或 CPOL。时钟极性和相位共同决定读取数据的方式,比如信号上升沿读取数据还是信号下降沿读取数据;
CKP 可以配置为1或0。这意味着您可以根据需要将时钟的默认状态(IDLE)设置为高或低。极性反转可以通过简单的逻辑逆变器实现。您必须参考设备的数据手册才能正确设置 CKP 和 CKE。
- CKP = 0: 时钟空闲IDLE为 低电平 0
- CKP = 1: 时钟空闲IDLE为 高电平1
时钟相位 CKE /Clock Phase (Edge)
除配置串行时钟速率和极性外,SPI主设备还应配置时钟相位(或边沿)。根据硬件制造商的不同,时钟相位通常写为 CKE 或 CPHA;
顾名思义,时钟相位/边沿,也就是采集数据时是在时钟信号的具体相位或者边沿;
- CKE = 0: 在时钟信号 SCK 的第一个跳变沿采样;
- CKE = 1: 在时钟信号 SCK 的第二个跳变沿采样;
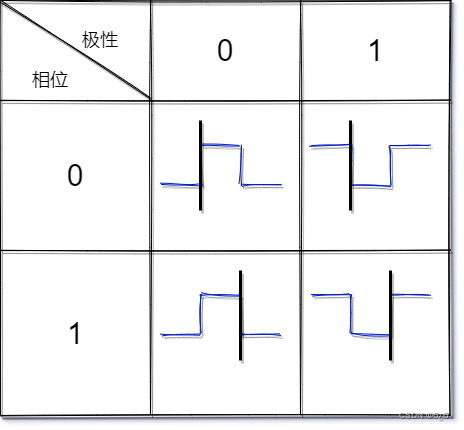
时钟配置总结
综上几种情况,下图总结了所有时钟配置组合,并突出显示了实际采样数据的时刻;
其中黑色线为采样数据的时刻;
蓝色线为SCK时钟信号;
具体如下图所示;
4.5、SPI模式
模式编号
SPI的时钟极性和相位的配置通常称为 SPI模式,所有可能的模式都遵循以下约定;具体如下表所示:
| SPI Mode | CPOL | CPHA |
|---|---|---|
| 0 [00] | 0 | 0 |
| 1 [01] | 0 | 1 |
| 2 [10] | 1 | 0 |
| 3 [11] | 1 | 1 |
SPI的四种模式,简单地讲就是设置SCLK时钟信号线的那种信号为有效信号
SPI通信有4种不同的操作模式,不同的从设备可能在出厂是就是配置为某种模式,这是不能改变的;但我们的通信双方必须是工作在同一模式下,所以我们可以对我们的主设备的SPI模式进行配置,通过CPOL(时钟极性)和CPHA(时钟相位)来
控制我们主设备的通信模式,具体如下:
时钟极性(CPOL)定义了时钟空闲状态电平:
- CPOL=0,表示当SCLK=0时处于空闲态,所以有效状态就是SCLK处于高电平时
- CPOL=1,表示当SCLK=1时处于空闲态,所以有效状态就是SCLK处于低电平时
时钟相位(CPHA)定义数据的采集时间:
- CPHA=0,在时钟的第一个跳变沿(上升沿或下降沿)进行数据采样。,在第2个边沿发送数据
- CPHA=1,在时钟的第二个跳变沿(上升沿或下降沿)进行数据采样。,在第1个边沿发送数据
Mode0:CPOL=0,CPHA=0:此时空闲态时,SCLK处于低电平,数据采样是在第1个边沿,也就是SCLK由低电平到高电平的跳变,所以数据采样是在上升沿(准备数据),(发送数据)数据发送是在下降沿。
Mode1:CPOL=0,CPHA=1:此时空闲态时,SCLK处于低电平,数据发送是在第1个边沿,也就是SCLK由低电平到高电平的跳变,所以数据采样是在下降沿,数据发送是在上升沿。
Mode2:CPOL=1,CPHA=0:此时空闲态时,SCLK处于高电平,数据采集是在第1个边沿,也就是SCLK由高电平到低电平的跳变,所以数据采集是在下降沿,数据发送是在上升沿。
Mode3:CPOL=1,CPHA=1:此时空闲态时,SCLK处于高电平,数据发送是在第1个边沿,也就是SCLK由高电平到低电平的跳变,所以数据采集是在上升沿,数据发送是在下降沿。
4.6、多从机模式
前面说到SPI总线必须有一个主机,可以有多个从机,那么具体连接到SPI总线的方法有以下两种:
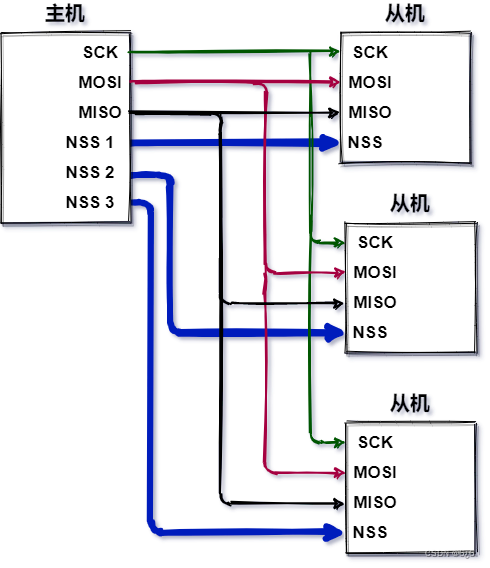
第一种方法:多NSS
- 通常,每个从机都需要一条单独的SS线。
如果要和特定的从机进行通讯,可以将相应的 NSS 信号线拉低,并保持其他NSS信号线的状态为高电平; - 如果同时将两个 NSS 信号线拉低,则可能会出现乱码,因为从机可能都试图在同一条 MISO 线上传输数据,最终导致接收数据乱码。
具体连接方式如下图所示;
第二种方法:菊花链
在数字通信世界中,在设备信号(总线信号或中断信号)以串行的方式从一 个设备依次传到下一个设备,不断循环直到数据到达目标设备的方式被称为 菊花链。
-
菊花链的最大缺点是因为是信号串行传输,所以一旦数据链路中的某设备发生故障的时候,它下面优先级较低的设备就不可能得到服务了;
-
另一方面,距离主机越远的从机,获得服务的优先级越低,所以需要安排好从机的优先级,并且设置总线检测器,如果某个从机超时,则对该从机进行短路,防止单个从机损坏造成整个链路崩溃的情况;
具体的连接如下图所示;
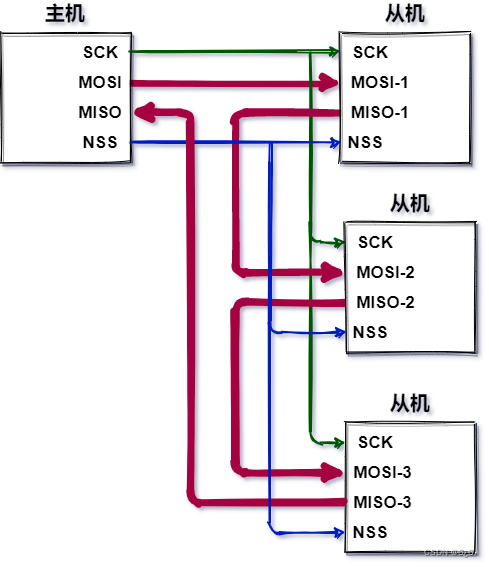
其中红线为数据的流向
所以最终的数据流向图可以表示为:
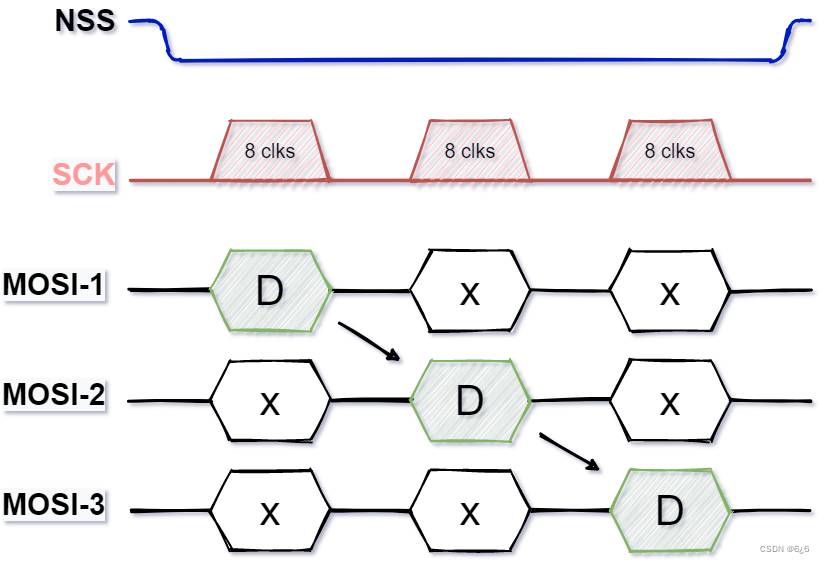
SCK为时钟信号,8clks表示8个边沿信号;
其中D为数据,X为无效数据;
所以不难发现,菊花链模式充分使用了SPI其移位寄存器的功能,整个链充当通信移位寄存器,每个从机在下一个时钟周期将输入数据复制到输出。
4.7、优缺点
SPI通讯的优势
- 全双工串行通信;
- 高速数据传输速率。
- 简单的软件配置;
- 极其灵活的数据传输,不限于8位,它可以是任意大小的字;
- 非常简单的硬件结构。从站不需要唯一地址(与I2C不同)。从机使用主机时钟,不需要精密时钟振荡器/晶振(与UART不同)。不需要收发器(与CAN不同)。
SPI的缺点
- 没有硬件从机应答信号(主机可能在不知情的情况下无处发送);
- 通常仅支持一个主设备;
- 需要更多的引脚(与I2C不同);
- 没有定义硬件级别的错误检查协议;
- 与RS-232和CAN总线相比,只能支持非常短的距离;
4.8、与UART进行对比
因为UART没有时钟信号,无法控制何时发送数据,也无法保证双发按照完全相同的速度接收数据。因此,双方以不同的速度进行数据接收和发送,就会出现问题。
如果要解决这个问题,UART为每个字节添加额外的 起始位 和 停止位 ,以帮助接收器在数据到达时进行同步;
双方还必须事先就 传输速度达成共识 (设置相同的波特率,例如每秒9600位)。
传输速率如果有微小差异不是问题,因为接收器会在每个字节的开头重新同步。相应的协议如下图所示;
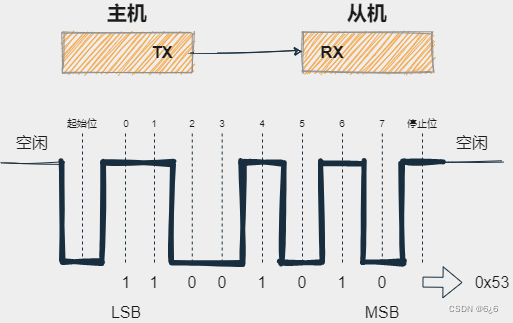
上图中的
11001010不等于0x53,这是一个细节。串口协议通常会首先发送最低有效位,因此最小位在最左边 LSB。低四位字节实际上是0011 = 0x3,高四位字节是0101 = 0x5。
异步串行工作得很好,但是在每个字节发送的时候都需要额外的 起始位 和 停止位 以及在发送和接收数据所需的复杂硬件方面都有很多开销。
不难发现,如果接收端和发送端设置的速度都不一致,那么接收到的数据将是乱码。
五、显示姓名学号
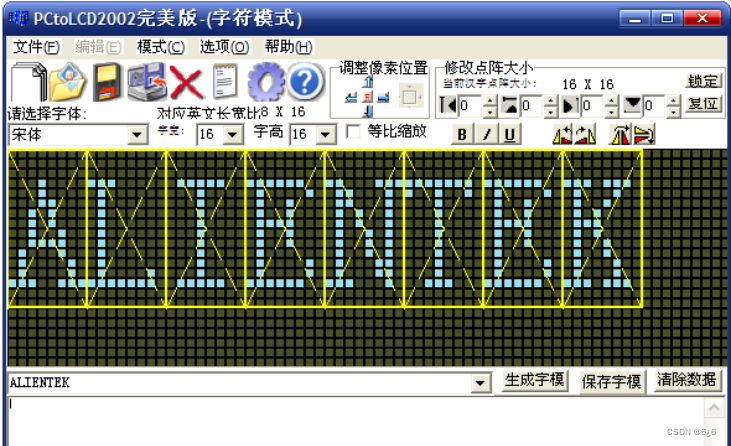
5.1、文字取模
-
利用取模软件将需要显示的文字用十六进制表示出来
链接:https://pan.baidu.com/s/1YbUiGlyfxHi_h2B_rqogBg?pwd=2022
提取码:2022 -
打开软件,进行初始设置
-
点击 参数设置->其他选项,将 取模方式 设置为 横向取模,不要勾选 字节倒序
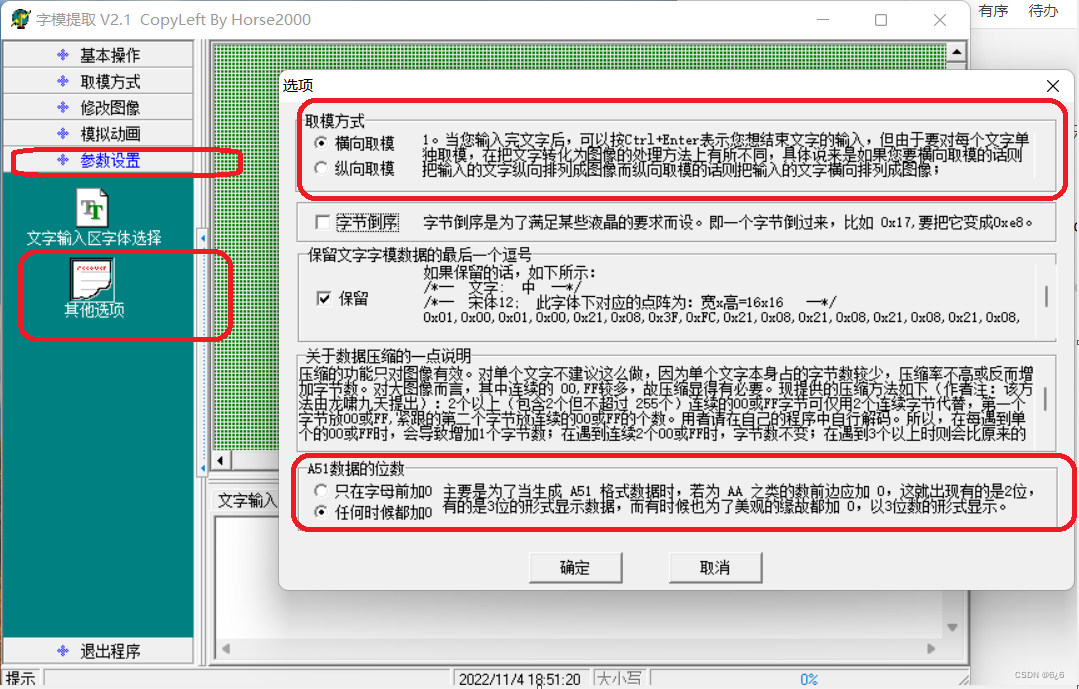
-
在文字输入区输入目标文字,并 ctrl+enter,得到显示图
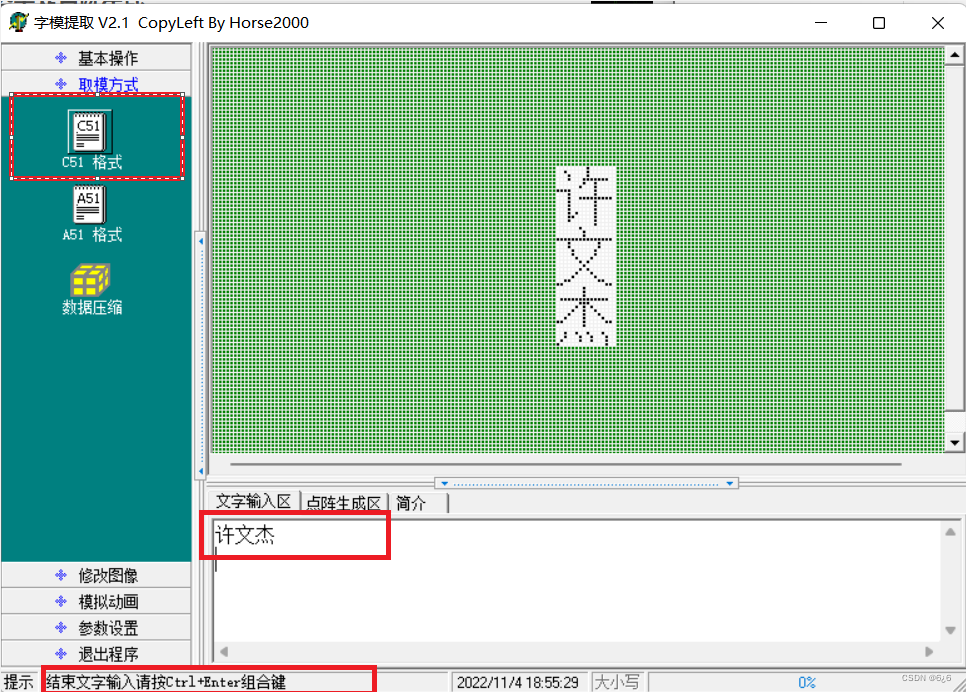
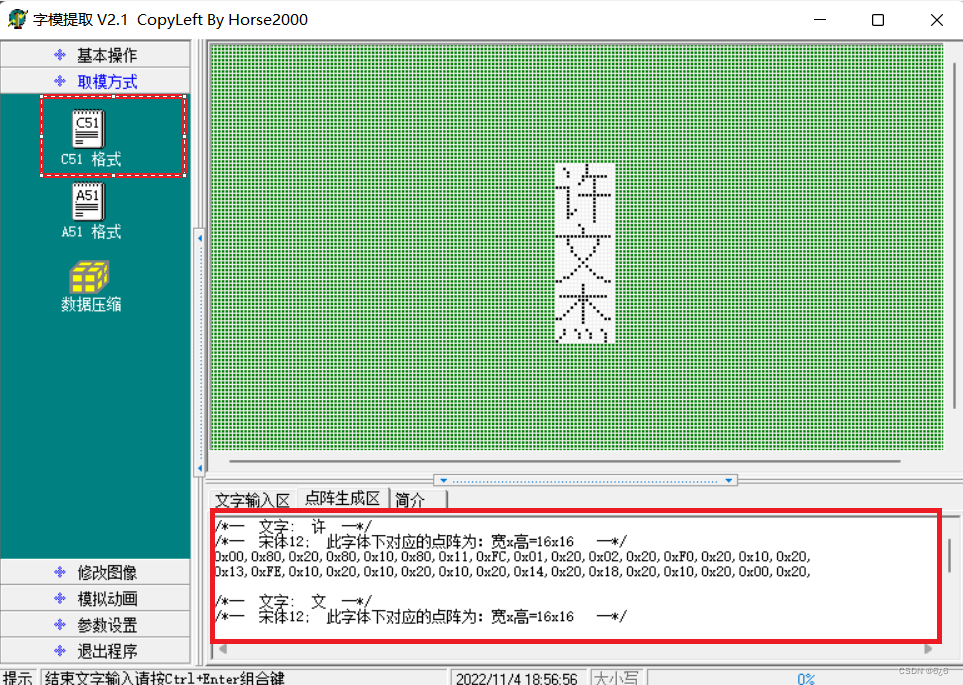
-
点击 C51格式,即可生成点阵
5.2、代码编写
-
解压开始下载的文件,打开该文件

-
打开 1-Demo->Demo_STM32->0.96inch_OLED_Demo_STM32F103RCT6_Software_4-wire_SPI->PROJECT

-
双击打开工程

-
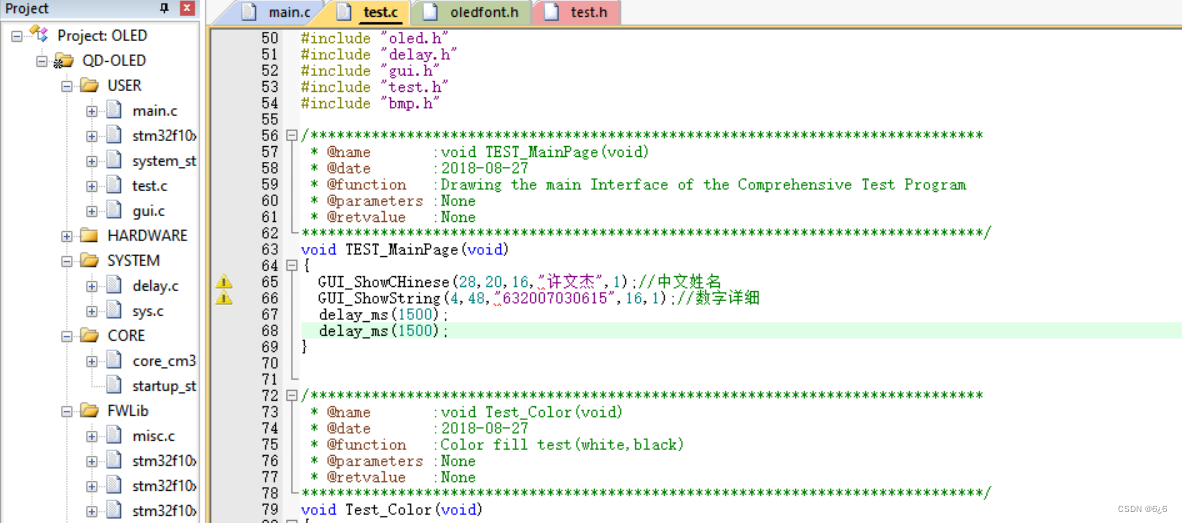
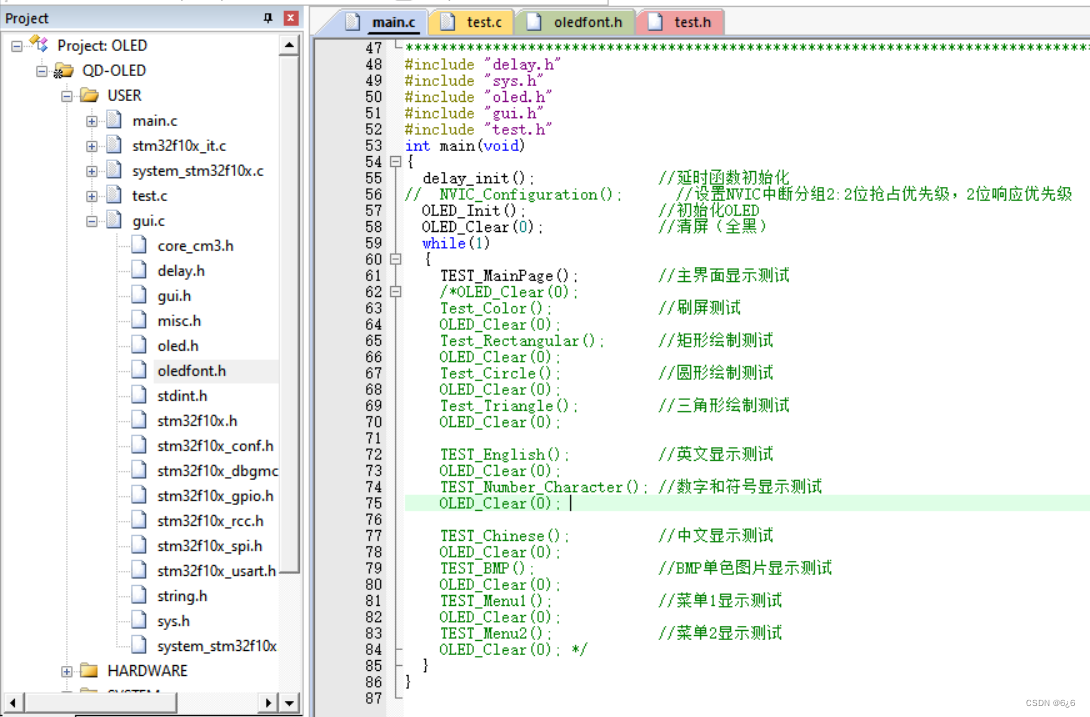
修改 test.c 下的 TEST_MainPage 函数
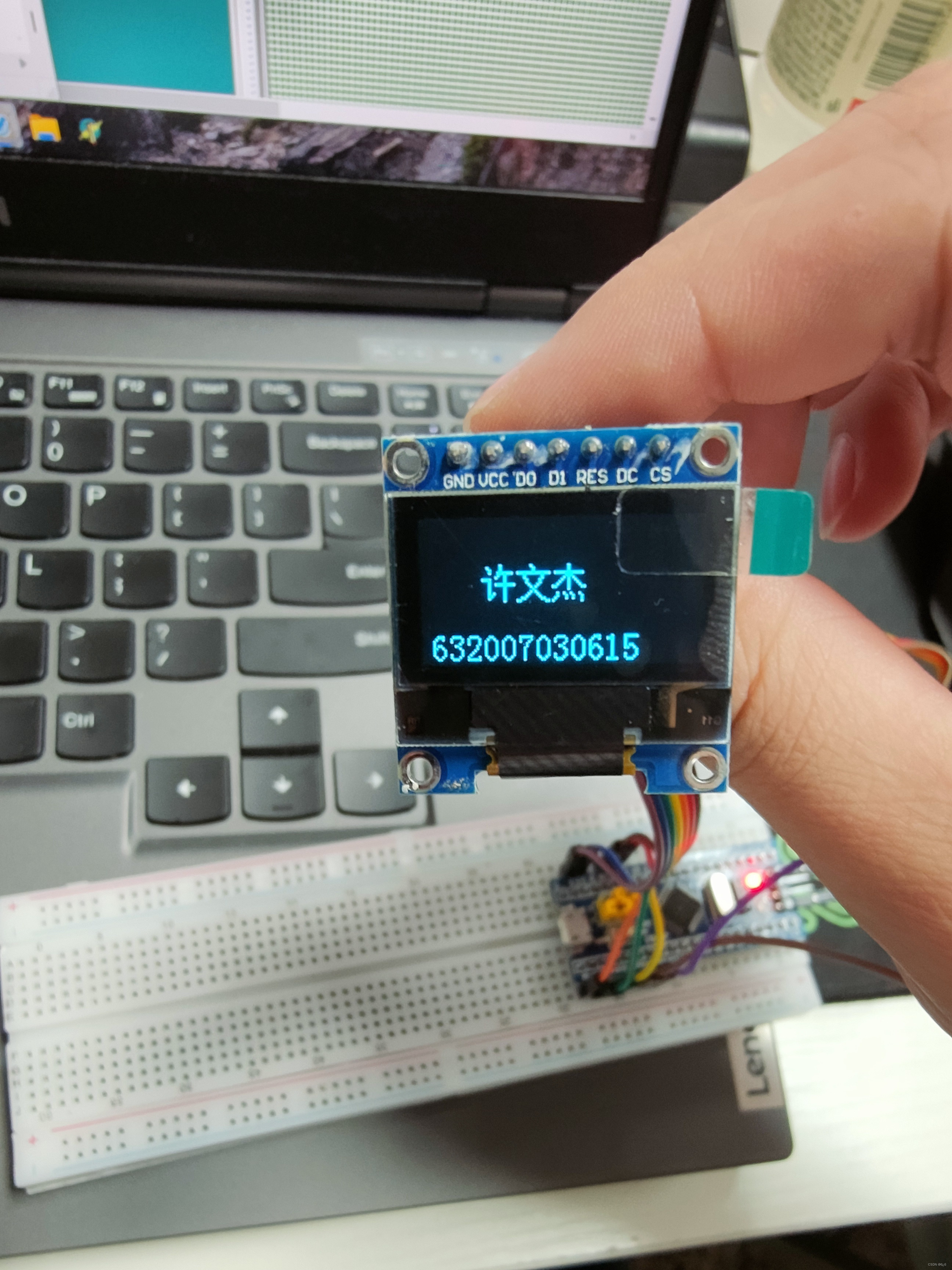
void TEST_MainPage(void)
{
GUI_ShowCHinese(28,20,16,"许文杰",1); //中文姓名
GUI_ShowString(4,48,"632007030615",16,1); //数字详细
delay_ms(1500);
delay_ms(1500);
}
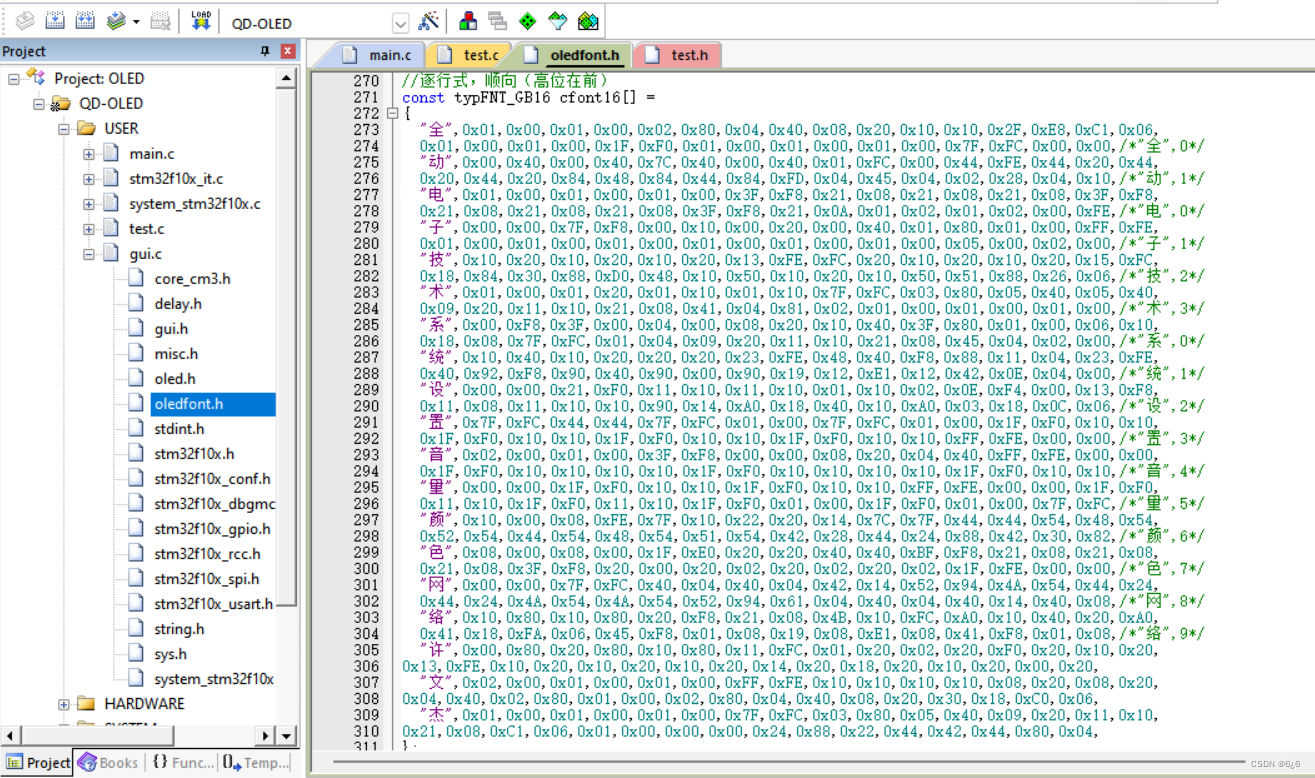
- 在 USER->gui.c 下找到工程项目中 oledfont.h 文件中的 cfont16 数组,在里面添加用字模提取器输出的点阵码
const typFNT_GB16 cfont16[] =
{
"许",0x00,0x80,0x20,0x80,0x10,0x80,0x11,0xFC,0x01,0x20,0x02,0x20,0xF0,0x20,0x10,0x20,
0x13,0xFE,0x10,0x20,0x10,0x20,0x10,0x20,0x14,0x20,0x18,0x20,0x10,0x20,0x00,0x20,
"文",0x02,0x00,0x01,0x00,0x01,0x00,0xFF,0xFE,0x10,0x10,0x10,0x10,0x08,0x20,0x08,0x20,
0x04,0x40,0x02,0x80,0x01,0x00,0x02,0x80,0x04,0x40,0x08,0x20,0x30,0x18,0xC0,0x06,
"杰",0x01,0x00,0x01,0x00,0x01,0x00,0x7F,0xFC,0x03,0x80,0x05,0x40,0x09,0x20,0x11,0x10,
0x21,0x08,0xC1,0x06,0x01,0x00,0x00,0x00,0x24,0x88,0x22,0x44,0x42,0x44,0x80,0x04,
};
- 修改 main.c 的主函数
int main(void)
{
delay_init(); //延时函数初始化
OLED_Init(); //初始化OLED
OLED_Clear(0); //清屏(全黑)
while(1)
{
TEST_MainPage(); //主界面显示测试
}
}
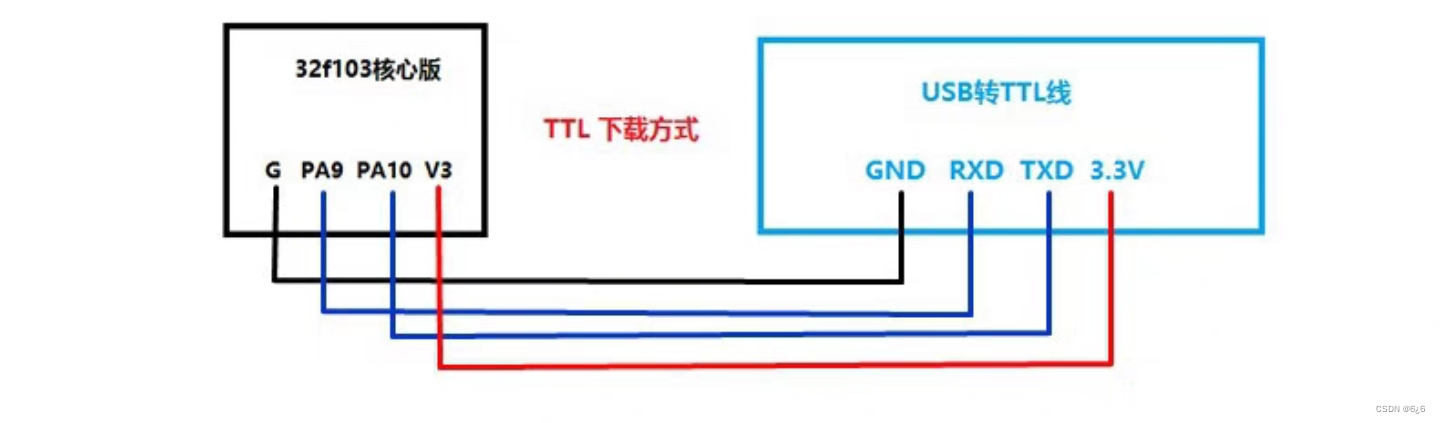
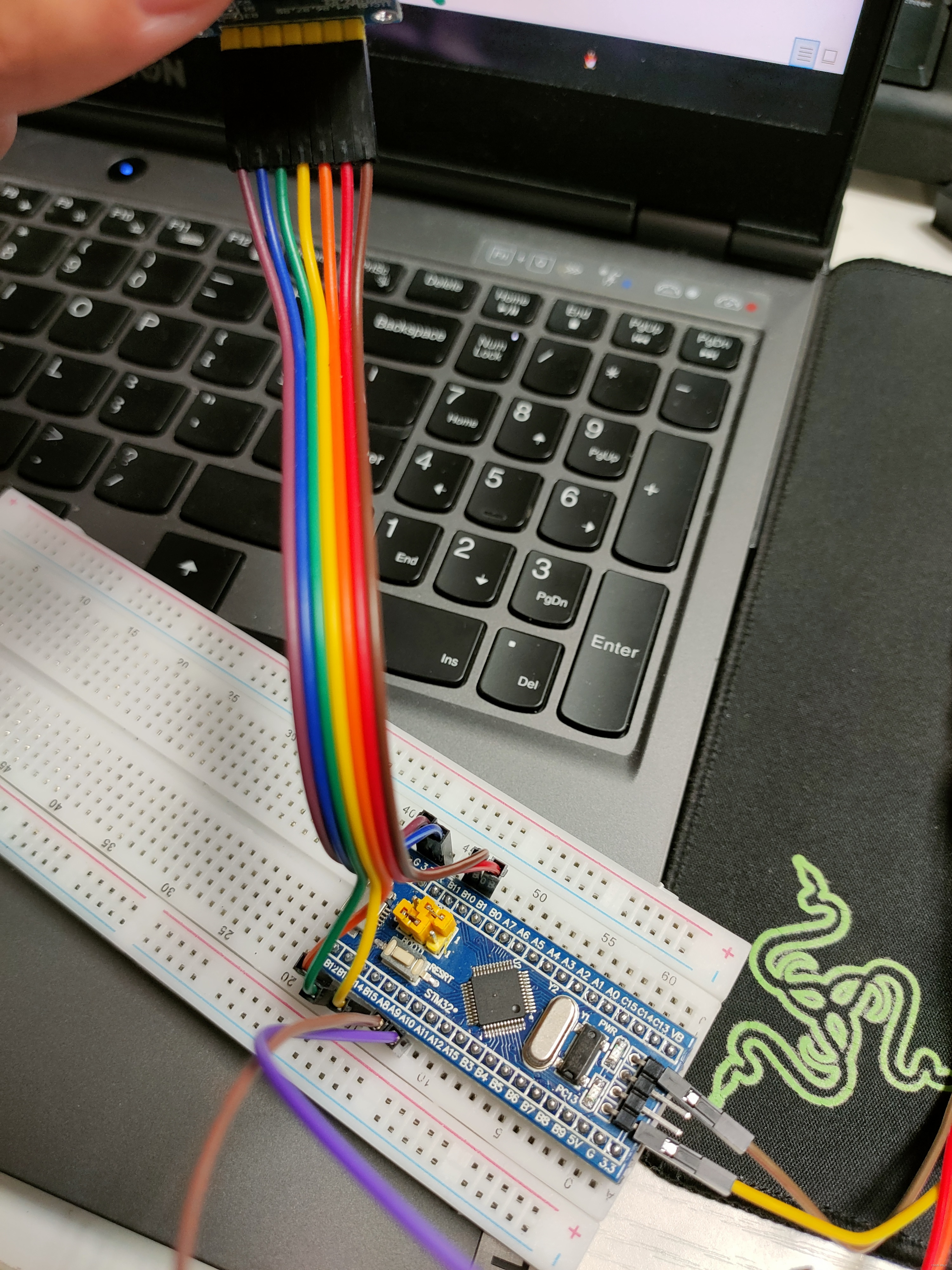
5.3、硬件连接
供电模块连接方法:
| USB转TTL | STM32F103C8T6 |
|---|---|
| GND | G |
| 3V3 | 3V3 |
| RXD | PA9 |
| TXD | PA10 |
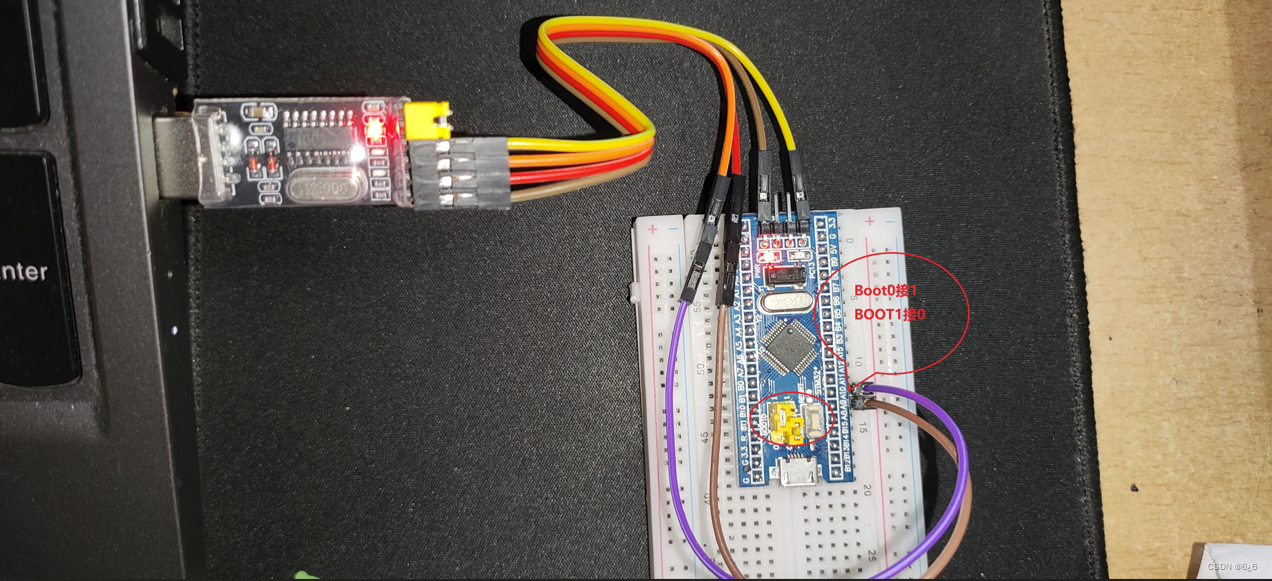
注意将核心板上的BOOT0设置为1,BOOT1设置为0
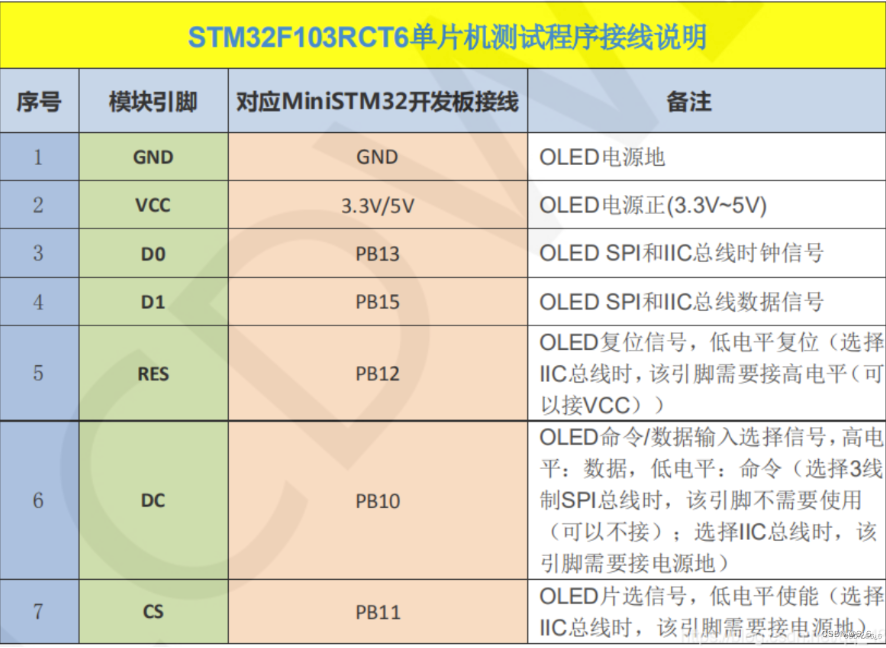
屏幕连接:
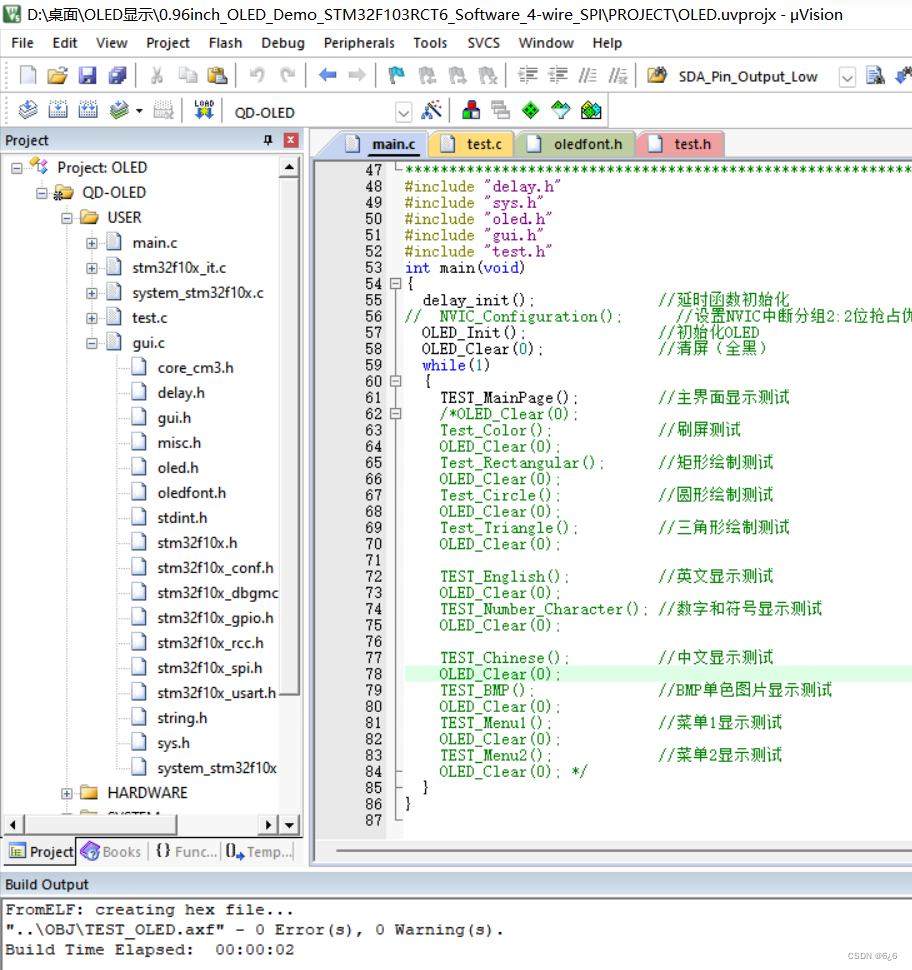
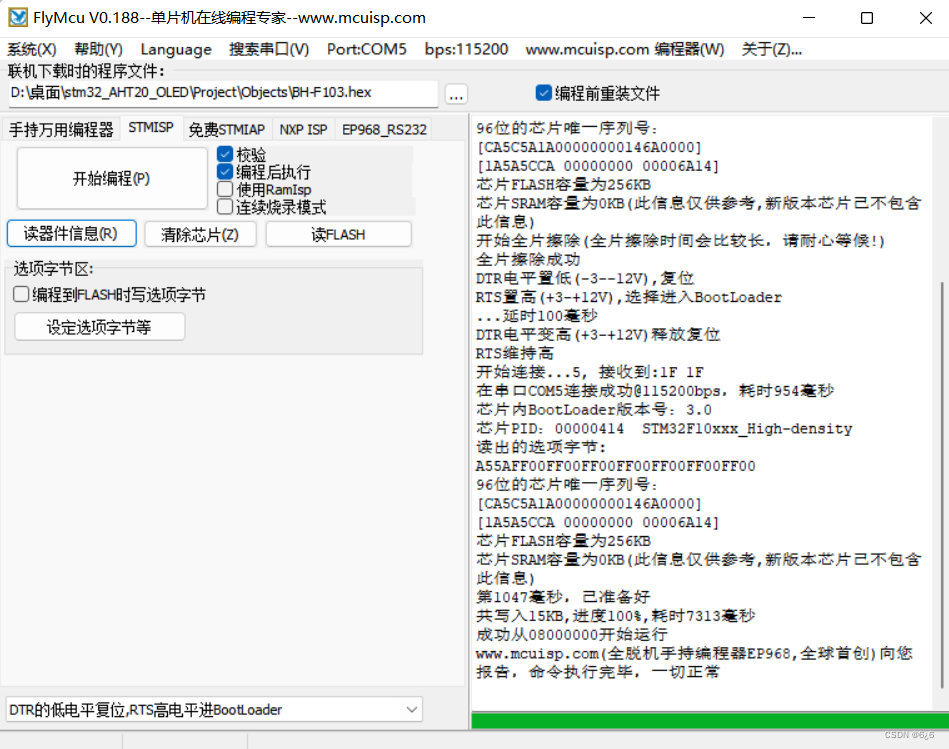
5.4、编译烧录
-
编译
-
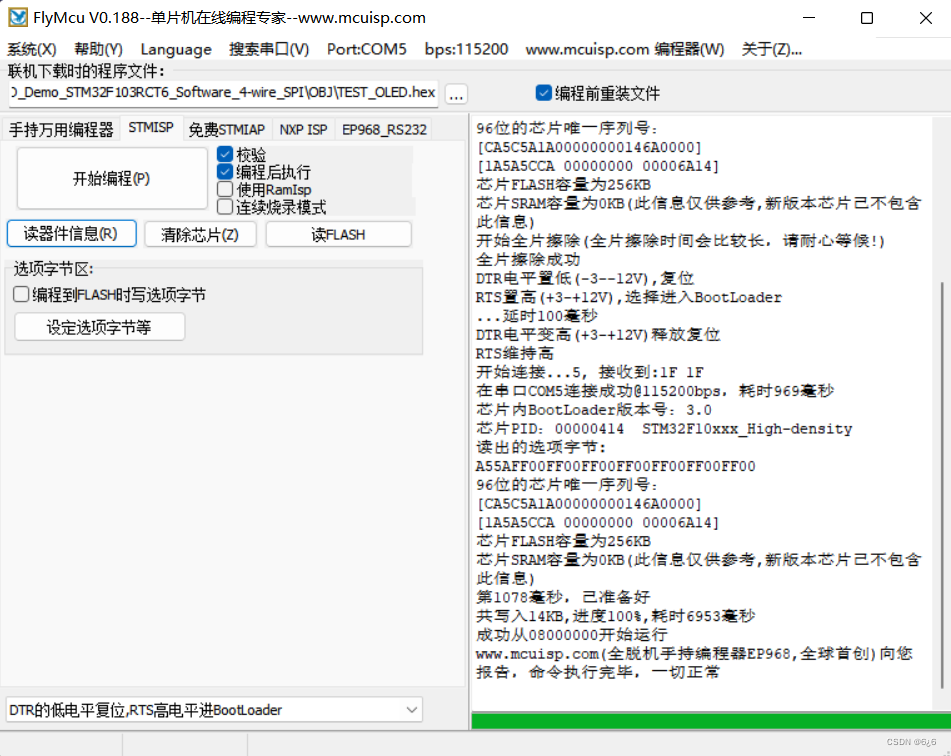
烧录
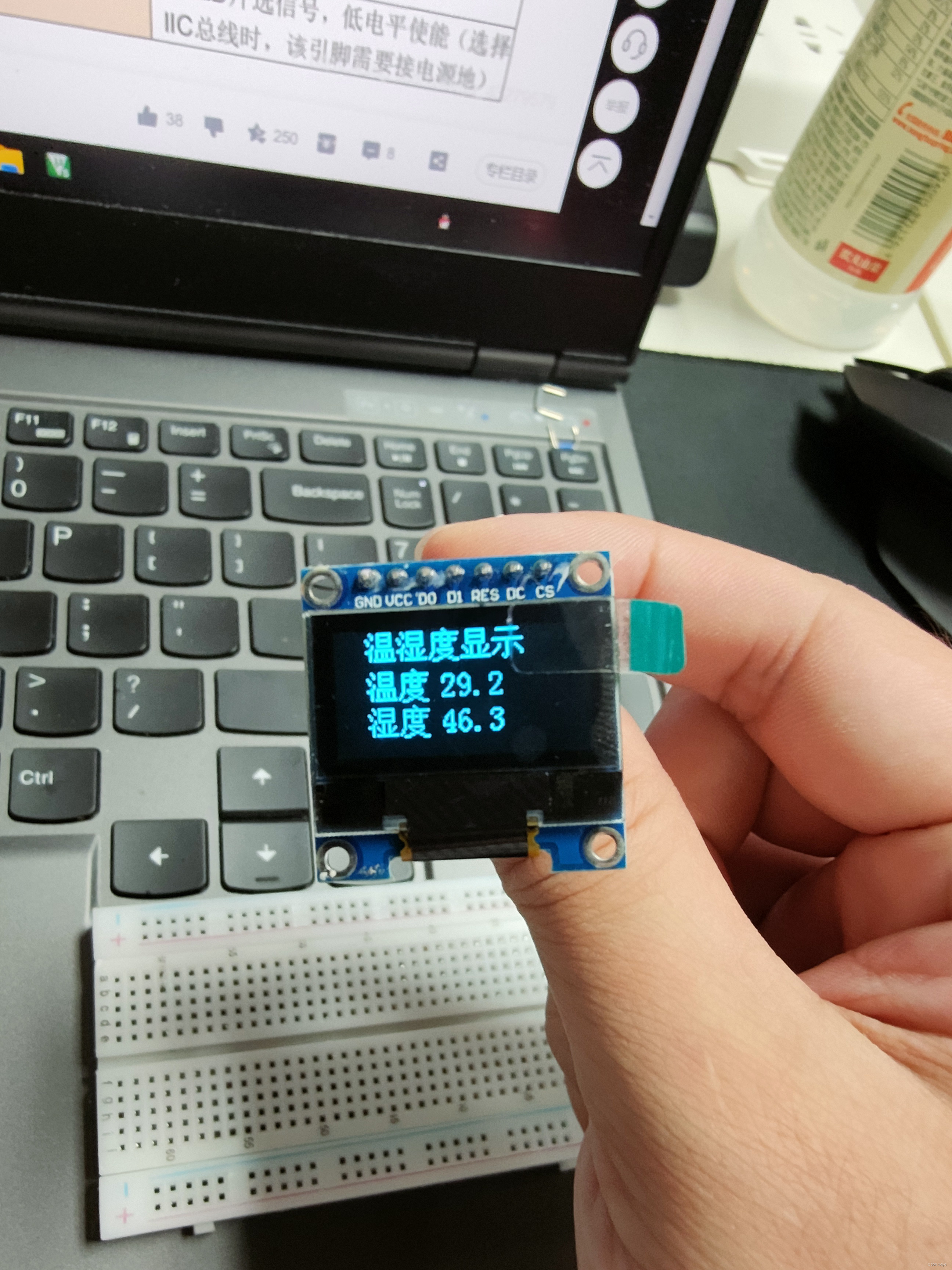
5.5、实现效果
5.6、完整代码
百度网盘:
链接:https://pan.baidu.com/s/1-bktJppbVh54TvyERdEg0A?pwd=2022
提取码:2022
六、显示温湿度
6.1、文字取模
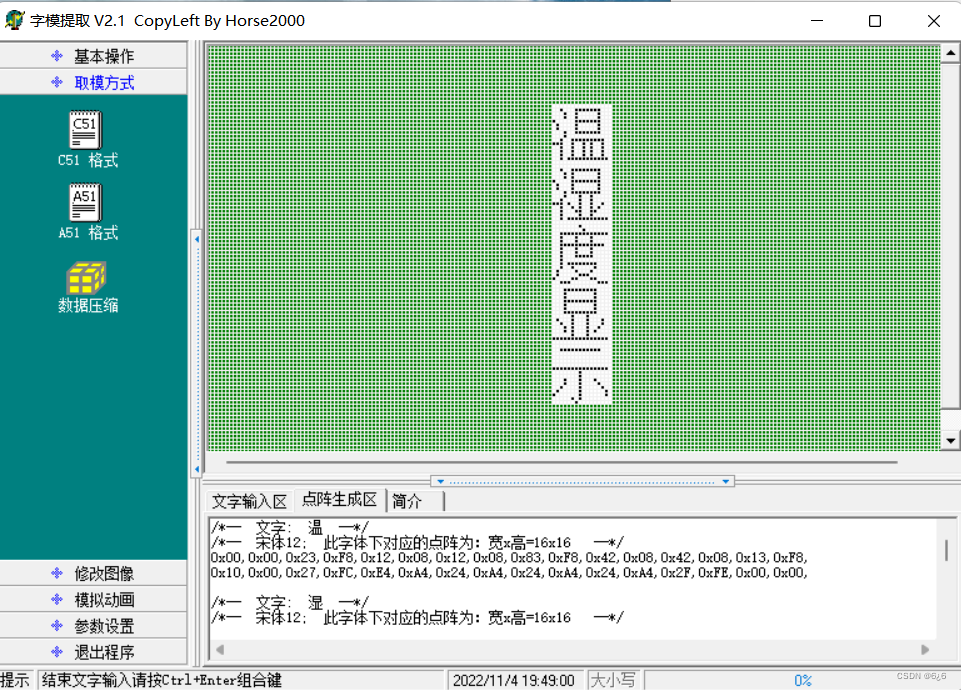
- 在文字输入区输入 温湿度显示,按下 ctrl+enter,点击 C51格式 取模,得到点阵图
6.2、代码编写
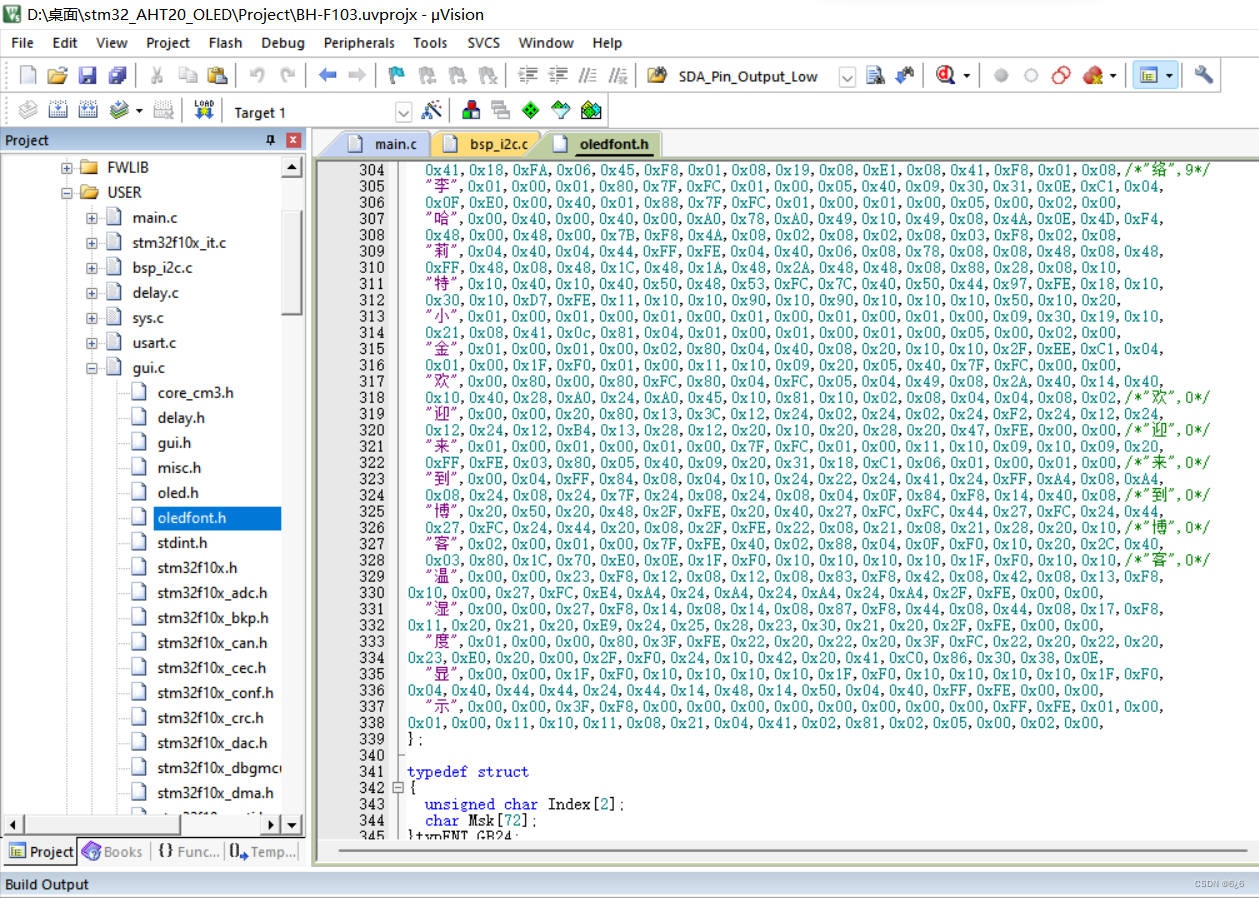
- 在 USER->gui.c 下面找到项目中 oledfont.h ,在 cfont16[ ] 内增添所需文字点阵
const typFNT_GB16 cfont16[] =
{
"温",0x00,0x00,0x23,0xF8,0x12,0x08,0x12,0x08,0x83,0xF8,0x42,0x08,0x42,0x08,0x13,0xF8,
0x10,0x00,0x27,0xFC,0xE4,0xA4,0x24,0xA4,0x24,0xA4,0x24,0xA4,0x2F,0xFE,0x00,0x00,
"湿",0x00,0x00,0x27,0xF8,0x14,0x08,0x14,0x08,0x87,0xF8,0x44,0x08,0x44,0x08,0x17,0xF8,
0x11,0x20,0x21,0x20,0xE9,0x24,0x25,0x28,0x23,0x30,0x21,0x20,0x2F,0xFE,0x00,0x00,
"度",0x01,0x00,0x00,0x80,0x3F,0xFE,0x22,0x20,0x22,0x20,0x3F,0xFC,0x22,0x20,0x22,0x20,
0x23,0xE0,0x20,0x00,0x2F,0xF0,0x24,0x10,0x42,0x20,0x41,0xC0,0x86,0x30,0x38,0x0E,
"显",0x00,0x00,0x1F,0xF0,0x10,0x10,0x10,0x10,0x1F,0xF0,0x10,0x10,0x10,0x10,0x1F,0xF0,
0x04,0x40,0x44,0x44,0x24,0x44,0x14,0x48,0x14,0x50,0x04,0x40,0xFF,0xFE,0x00,0x00,
"示",0x00,0x00,0x3F,0xF8,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0xFE,0x01,0x00,
0x01,0x00,0x11,0x10,0x11,0x08,0x21,0x04,0x41,0x02,0x81,0x02,0x05,0x00,0x02,0x00,
};
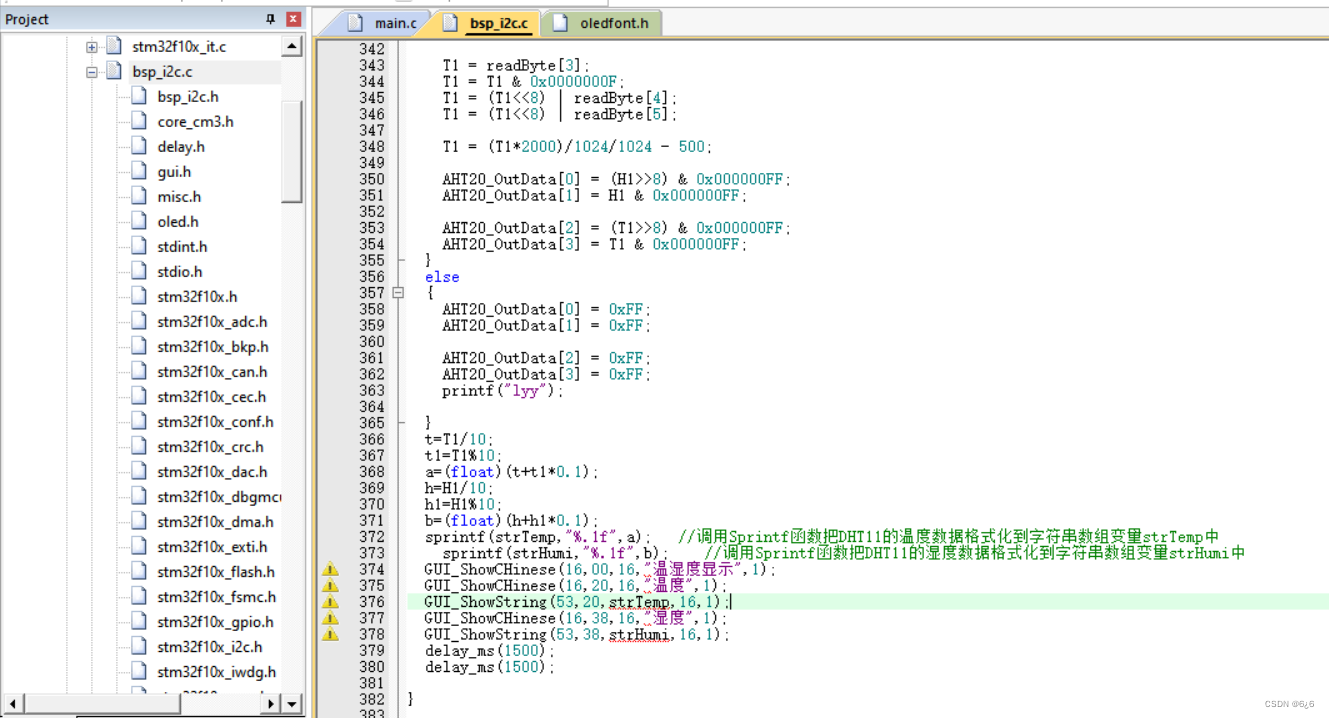
- 在 bsp_i2c.c 中重新写入函数 read_AHT20
void read_AHT20(void)
{
uint8_t i;
for(i=0; i<6; i++)
{
readByte[i]=0;
}
//-------------
I2C_Start();
I2C_WriteByte(0x71);
ack_status = Receive_ACK();
readByte[0]= I2C_ReadByte();
Send_ACK();
readByte[1]= I2C_ReadByte();
Send_ACK();
readByte[2]= I2C_ReadByte();
Send_ACK();
readByte[3]= I2C_ReadByte();
Send_ACK();
readByte[4]= I2C_ReadByte();
Send_ACK();
readByte[5]= I2C_ReadByte();
SendNot_Ack();
//Send_ACK();
I2C_Stop();
//--------------
if( (readByte[0] & 0x68) == 0x08 )
{
H1 = readByte[1];
H1 = (H1<<8) | readByte[2];
H1 = (H1<<8) | readByte[3];
H1 = H1>>4;
H1 = (H1*1000)/1024/1024;
T1 = readByte[3];
T1 = T1 & 0x0000000F;
T1 = (T1<<8) | readByte[4];
T1 = (T1<<8) | readByte[5];
T1 = (T1*2000)/1024/1024 - 500;
AHT20_OutData[0] = (H1>>8) & 0x000000FF;
AHT20_OutData[1] = H1 & 0x000000FF;
AHT20_OutData[2] = (T1>>8) & 0x000000FF;
AHT20_OutData[3] = T1 & 0x000000FF;
}
else
{
AHT20_OutData[0] = 0xFF;
AHT20_OutData[1] = 0xFF;
AHT20_OutData[2] = 0xFF;
AHT20_OutData[3] = 0xFF;
printf("lyy");
}
t=T1/10;
t1=T1%10;
a=(float)(t+t1*0.1);
h=H1/10;
h1=H1%10;
b=(float)(h+h1*0.1);
sprintf(strTemp,"%.1f",a); //调用Sprintf函数把DHT11的温度数据格式化到字符串数组变量strTemp中
sprintf(strHumi,"%.1f",b); //调用Sprintf函数把DHT11的湿度数据格式化到字符串数组变量strHumi中
GUI_ShowCHinese(16,00,16,"温湿度显示",1);
GUI_ShowCHinese(16,20,16,"温度",1);
GUI_ShowString(53,20,strTemp,16,1);
GUI_ShowCHinese(16,38,16,"湿度",1);
GUI_ShowString(53,38,strHumi,16,1);
delay_ms(1500);
delay_ms(1500);
}
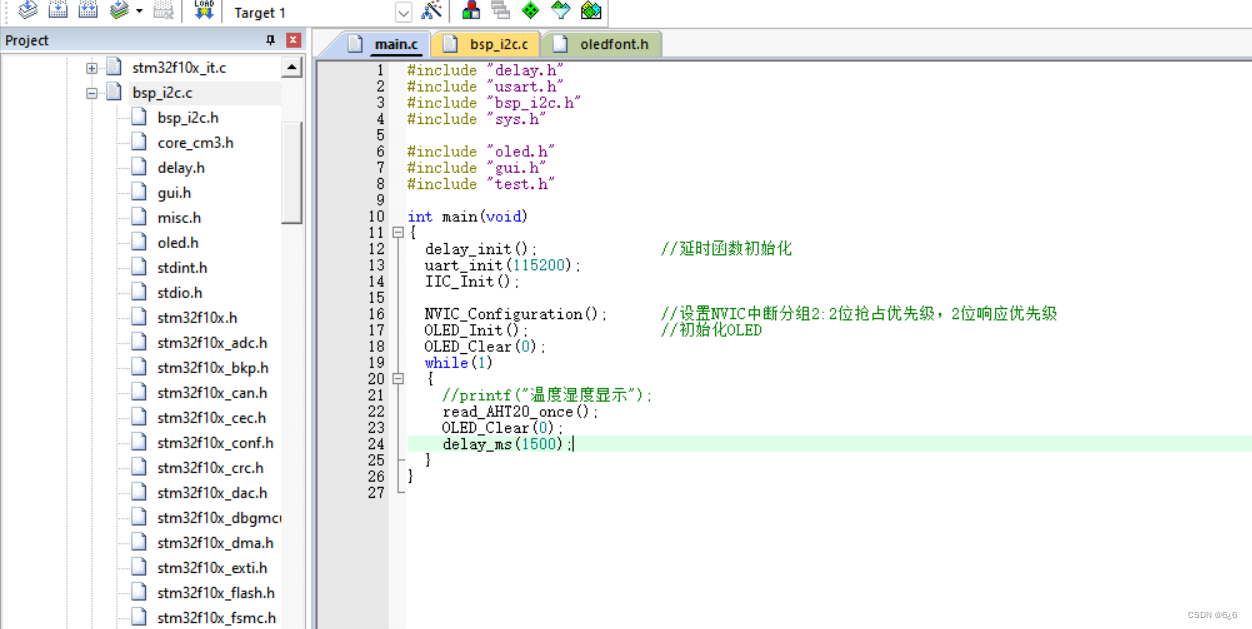
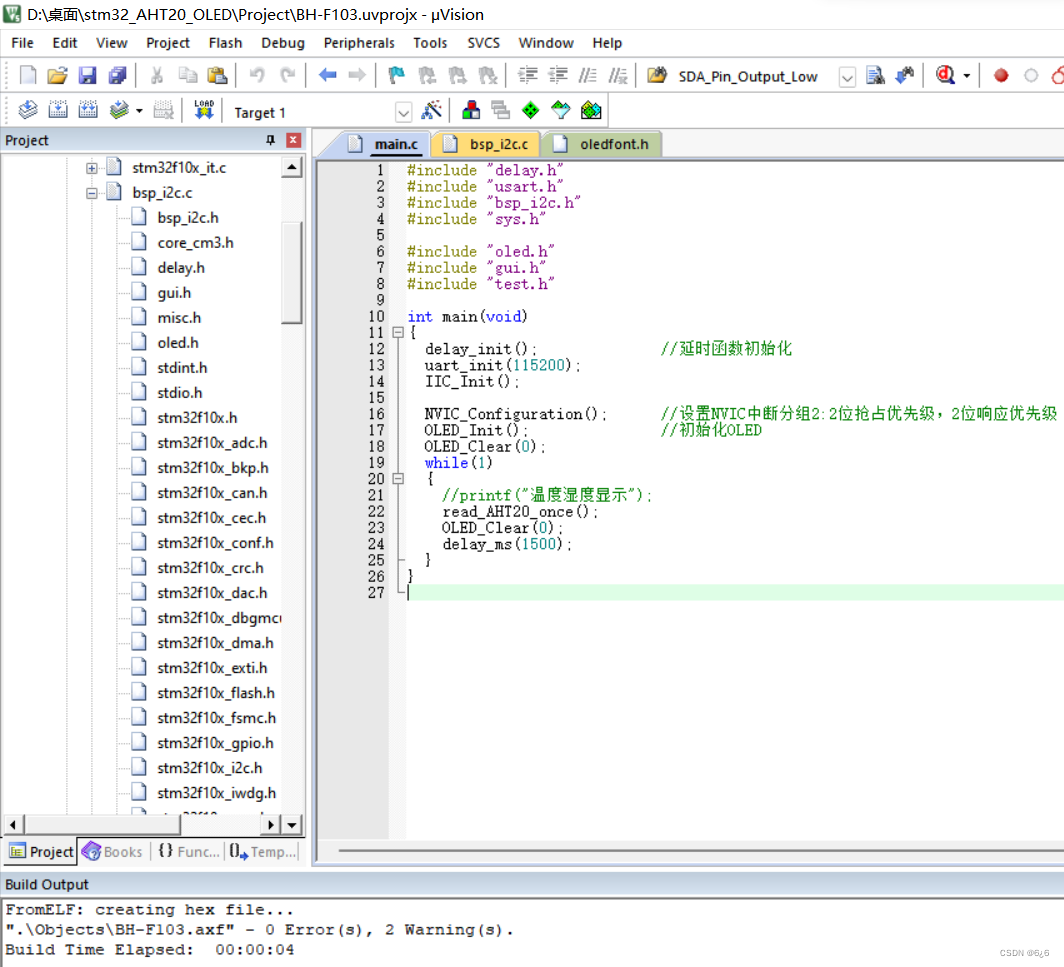
- 改写 main.c 的主函数
int main(void)
{
delay_init(); //延时函数初始化
uart_init(115200);
IIC_Init();
NVIC_Configuration(); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
OLED_Init(); //初始化OLED
OLED_Clear(0);
while(1)
{
//printf("温度湿度显示");
read_AHT20_once();
OLED_Clear(0);
delay_ms(1500);
}
}
6.3、硬件连接
供电模块连接方法:
| USB转TTL | STM32F103C8T6 |
|---|---|
| GND | G |
| 3V3 | 3V3 |
| RXD | PA9 |
| TXD | PA10 |
注意将核心板上的BOOT0设置为1,BOOT1设置为0
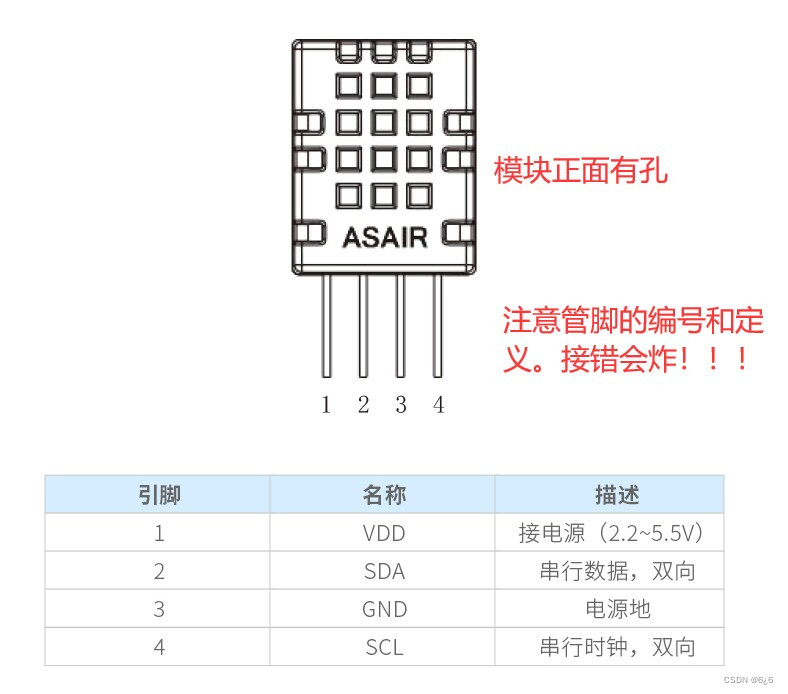
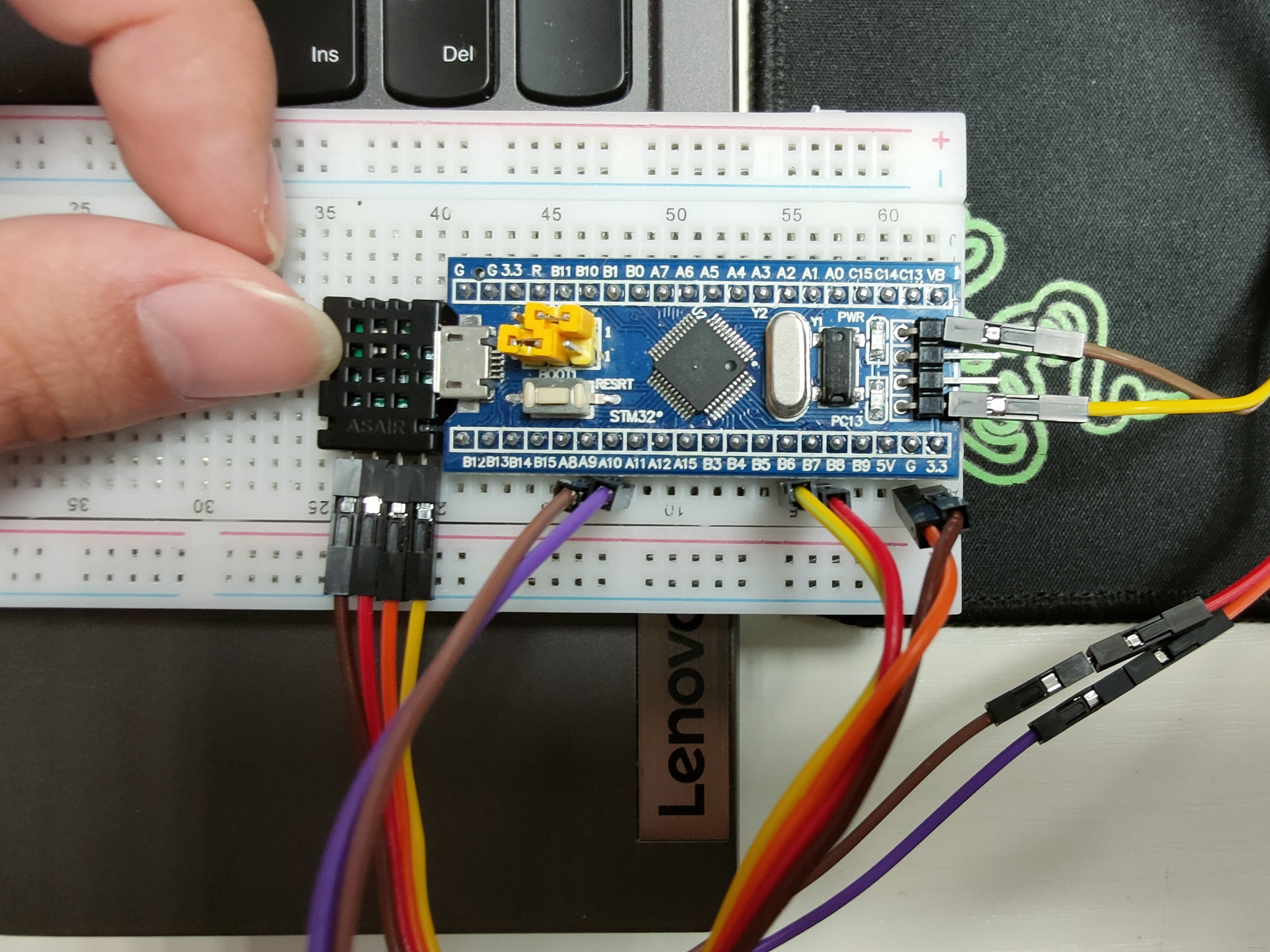
AHT20传感器模块连接方法:
| STM32F103C8T6 | AHT20传感器 |
|---|---|
| 3.3V | 1号脚(VDD) |
| PB7 | 2号脚(SDA) |
| GND | 3号脚(GND) |
| PB6 | 4号脚(SCL) |
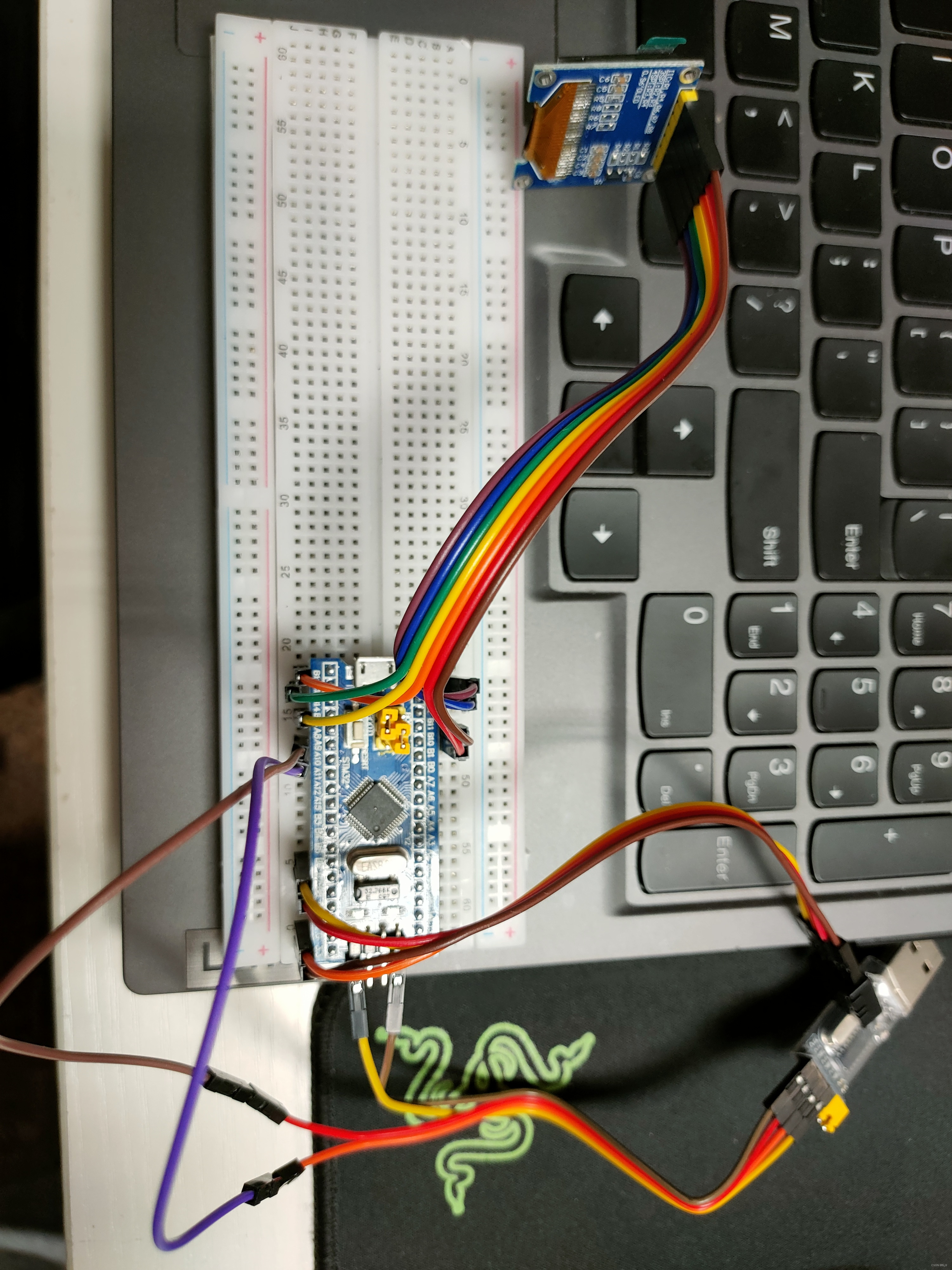
屏幕连接:
整体效果:
6.4、编译烧录
-
编译
-
烧录
6.5、实现效果
6.6、完整代码
百度网盘:
链接:https://pan.baidu.com/s/1cAklk_5GPxIzaUmWQ4dxrA?pwd=2022
提取码:2022
gitee仓库地址:
链接:https://gitee.com/xuwenjie10086/qrs/tree/master/OLED%E5%B1%8F%E5%B9%95%E6%98%BE%E7%A4%BA%E6%B8%A9%E6%B9%BF%E5%BA%A6
七、滑动显示长字符
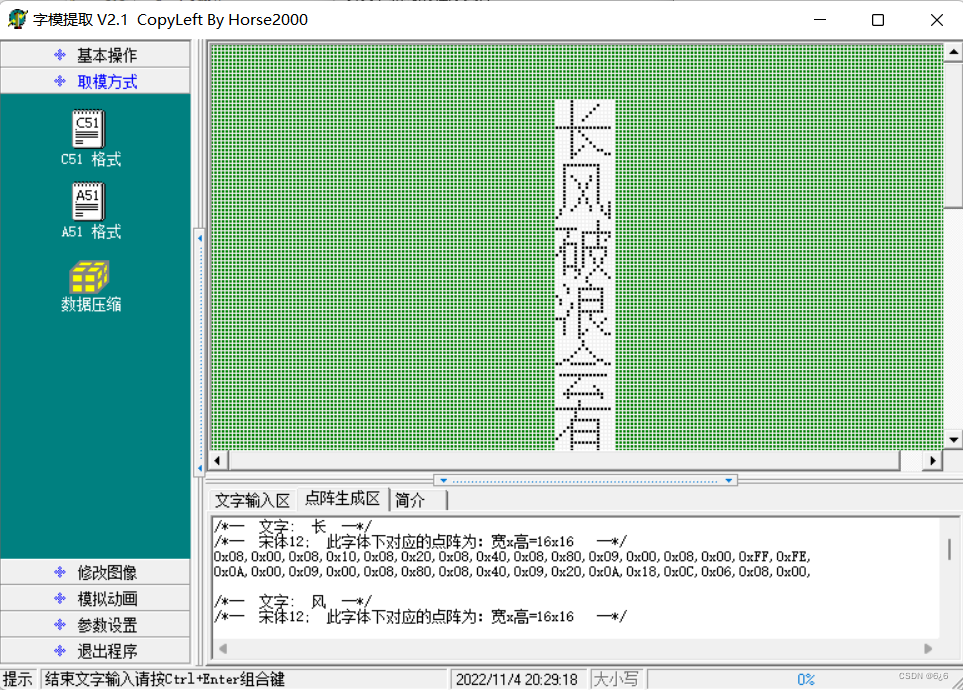
7.1、文字取模
- 在文字输入区输入 长风破浪会有时,直挂云帆济沧海,按下 ctrl+enter,点击 C51格式 取模,得到点阵图
7.2、代码编写
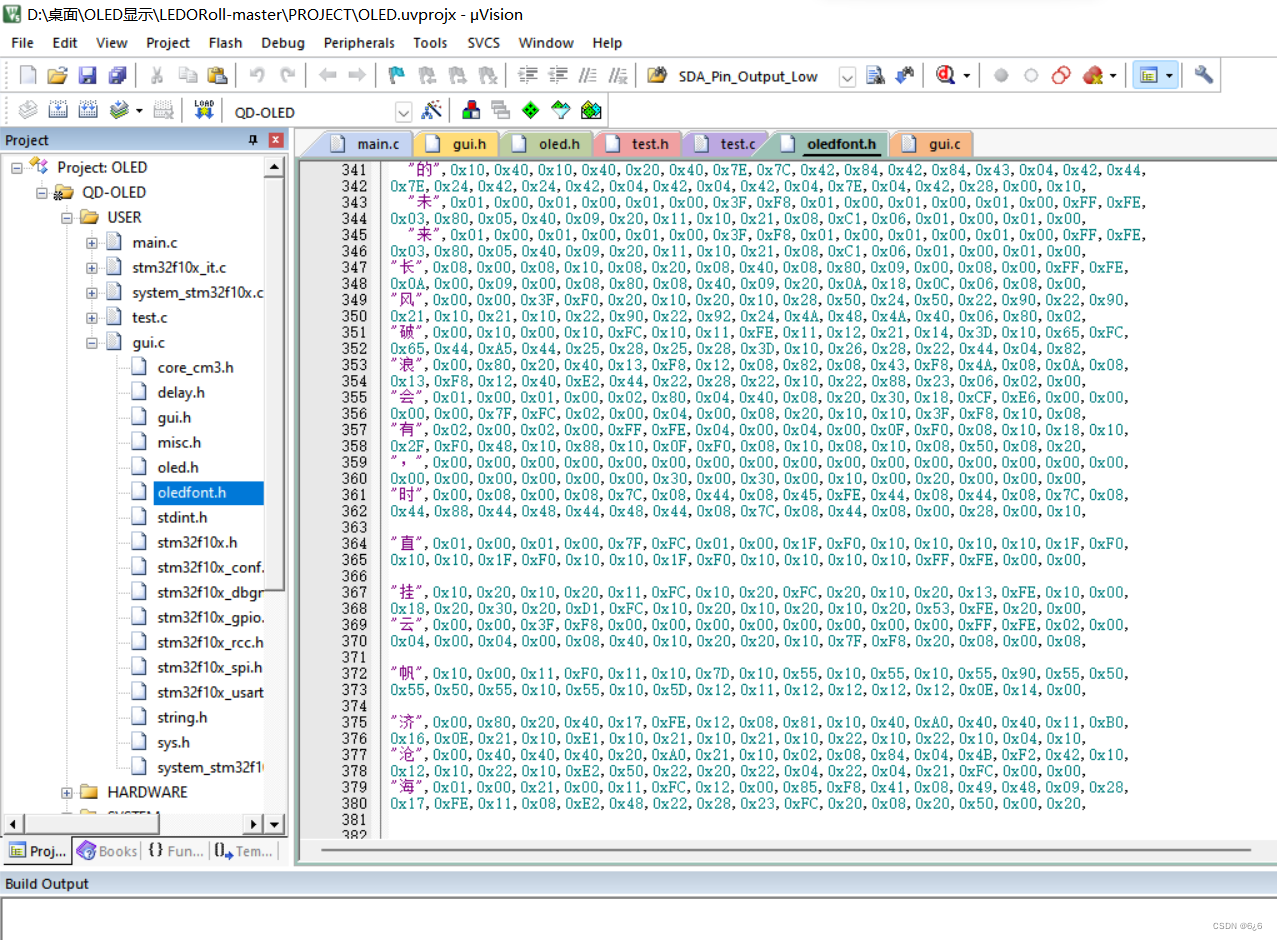
- 在 gui.c 下找到 oledfont.h 文件,在 **cfont[ ]**内存储生成的汉字点阵
const typFNT_GB16 cfont16[] =
{
"长",0x08,0x00,0x08,0x10,0x08,0x20,0x08,0x40,0x08,0x80,0x09,0x00,0x08,0x00,0xFF,0xFE,
0x0A,0x00,0x09,0x00,0x08,0x80,0x08,0x40,0x09,0x20,0x0A,0x18,0x0C,0x06,0x08,0x00,
"风",0x00,0x00,0x3F,0xF0,0x20,0x10,0x20,0x10,0x28,0x50,0x24,0x50,0x22,0x90,0x22,0x90,
0x21,0x10,0x21,0x10,0x22,0x90,0x22,0x92,0x24,0x4A,0x48,0x4A,0x40,0x06,0x80,0x02,
"破",0x00,0x10,0x00,0x10,0xFC,0x10,0x11,0xFE,0x11,0x12,0x21,0x14,0x3D,0x10,0x65,0xFC,
0x65,0x44,0xA5,0x44,0x25,0x28,0x25,0x28,0x3D,0x10,0x26,0x28,0x22,0x44,0x04,0x82,
"浪",0x00,0x80,0x20,0x40,0x13,0xF8,0x12,0x08,0x82,0x08,0x43,0xF8,0x4A,0x08,0x0A,0x08,
0x13,0xF8,0x12,0x40,0xE2,0x44,0x22,0x28,0x22,0x10,0x22,0x88,0x23,0x06,0x02,0x00,
"会",0x01,0x00,0x01,0x00,0x02,0x80,0x04,0x40,0x08,0x20,0x30,0x18,0xCF,0xE6,0x00,0x00,
0x00,0x00,0x7F,0xFC,0x02,0x00,0x04,0x00,0x08,0x20,0x10,0x10,0x3F,0xF8,0x10,0x08,
"有",0x02,0x00,0x02,0x00,0xFF,0xFE,0x04,0x00,0x04,0x00,0x0F,0xF0,0x08,0x10,0x18,0x10,
0x2F,0xF0,0x48,0x10,0x88,0x10,0x0F,0xF0,0x08,0x10,0x08,0x10,0x08,0x50,0x08,0x20,
",",0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x00,0x30,0x00,0x10,0x00,0x20,0x00,0x00,0x00,
"时",0x00,0x08,0x00,0x08,0x7C,0x08,0x44,0x08,0x45,0xFE,0x44,0x08,0x44,0x08,0x7C,0x08,
0x44,0x88,0x44,0x48,0x44,0x48,0x44,0x08,0x7C,0x08,0x44,0x08,0x00,0x28,0x00,0x10,
"直",0x01,0x00,0x01,0x00,0x7F,0xFC,0x01,0x00,0x1F,0xF0,0x10,0x10,0x10,0x10,0x1F,0xF0,
0x10,0x10,0x1F,0xF0,0x10,0x10,0x1F,0xF0,0x10,0x10,0x10,0x10,0xFF,0xFE,0x00,0x00,
"挂",0x10,0x20,0x10,0x20,0x11,0xFC,0x10,0x20,0xFC,0x20,0x10,0x20,0x13,0xFE,0x10,0x00,
0x18,0x20,0x30,0x20,0xD1,0xFC,0x10,0x20,0x10,0x20,0x10,0x20,0x53,0xFE,0x20,0x00,
"云",0x00,0x00,0x3F,0xF8,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0xFE,0x02,0x00,
0x04,0x00,0x04,0x00,0x08,0x40,0x10,0x20,0x20,0x10,0x7F,0xF8,0x20,0x08,0x00,0x08,
"帆",0x10,0x00,0x11,0xF0,0x11,0x10,0x7D,0x10,0x55,0x10,0x55,0x10,0x55,0x90,0x55,0x50,
0x55,0x50,0x55,0x10,0x55,0x10,0x5D,0x12,0x11,0x12,0x12,0x12,0x12,0x0E,0x14,0x00,
"济",0x00,0x80,0x20,0x40,0x17,0xFE,0x12,0x08,0x81,0x10,0x40,0xA0,0x40,0x40,0x11,0xB0,
0x16,0x0E,0x21,0x10,0xE1,0x10,0x21,0x10,0x21,0x10,0x22,0x10,0x22,0x10,0x04,0x10,
"沧",0x00,0x40,0x40,0x40,0x20,0xA0,0x21,0x10,0x02,0x08,0x84,0x04,0x4B,0xF2,0x42,0x10,
0x12,0x10,0x22,0x10,0xE2,0x50,0x22,0x20,0x22,0x04,0x22,0x04,0x21,0xFC,0x00,0x00,
"海",0x01,0x00,0x21,0x00,0x11,0xFC,0x12,0x00,0x85,0xF8,0x41,0x08,0x49,0x48,0x09,0x28,
0x17,0xFE,0x11,0x08,0xE2,0x48,0x22,0x28,0x23,0xFC,0x20,0x08,0x20,0x50,0x00,0x20,
};
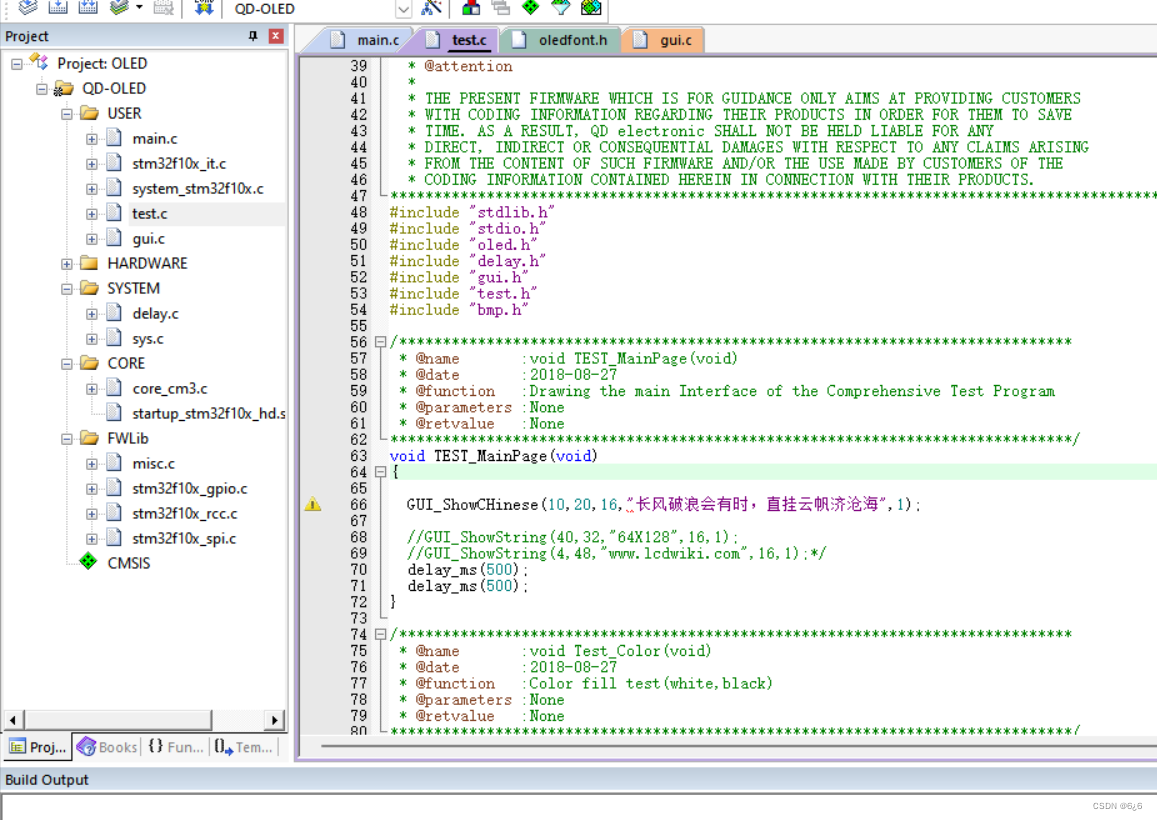
- 在 test.c 中修改 Test_MainPage 函数
void TEST_MainPage(void)
{
GUI_ShowCHinese(10,20,16,"长风破浪会有时,直挂云帆济沧海",1);
delay_ms(500);
delay_ms(500);
}
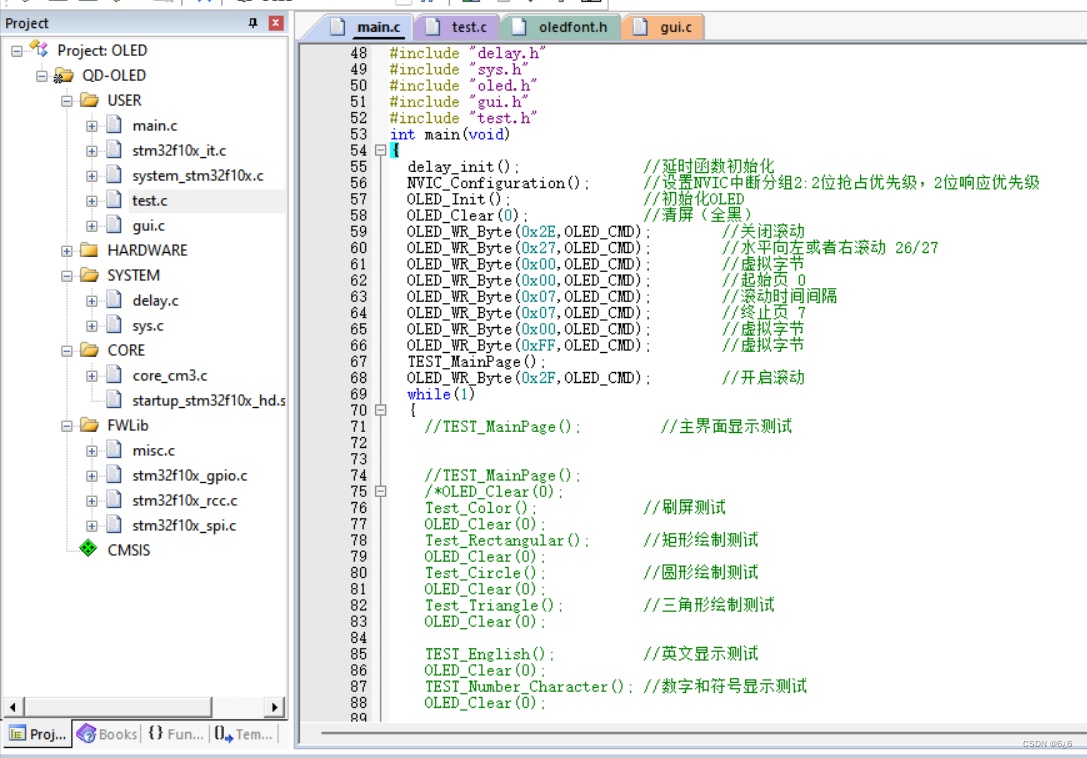
- 修改 main.c 文件的主函数,添加相应的 OLED 滚动代码;删除 while 循环内的函数 Test_MainPage
#include "delay.h"
#include "sys.h"
#include "oled.h"
#include "gui.h"
#include "test.h"
int main(void)
{
delay_init(); //延时函数初始化
NVIC_Configuration(); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
OLED_Init(); //初始化OLED
OLED_Clear(0); //清屏(全黑)
OLED_WR_Byte(0x2E,OLED_CMD); //关闭滚动
OLED_WR_Byte(0x27,OLED_CMD); //水平向左或者右滚动 26/27
OLED_WR_Byte(0x00,OLED_CMD); //虚拟字节
OLED_WR_Byte(0x00,OLED_CMD); //起始页 0
OLED_WR_Byte(0x07,OLED_CMD); //滚动时间间隔
OLED_WR_Byte(0x07,OLED_CMD); //终止页 7
OLED_WR_Byte(0x00,OLED_CMD); //虚拟字节
OLED_WR_Byte(0xFF,OLED_CMD); //虚拟字节
TEST_MainPage();
OLED_WR_Byte(0x2F,OLED_CMD); //开启滚动
while(1)
{
}
}
7.3、硬件连接
供电模块连接方法:
| USB转TTL | STM32F103C8T6 |
|---|---|
| GND | G |
| 3V3 | 3V3 |
| RXD | PA9 |
| TXD | PA10 |
注意将核心板上的BOOT0设置为1,BOOT1设置为0
屏幕连接:
7.4、编译烧录
-
编译
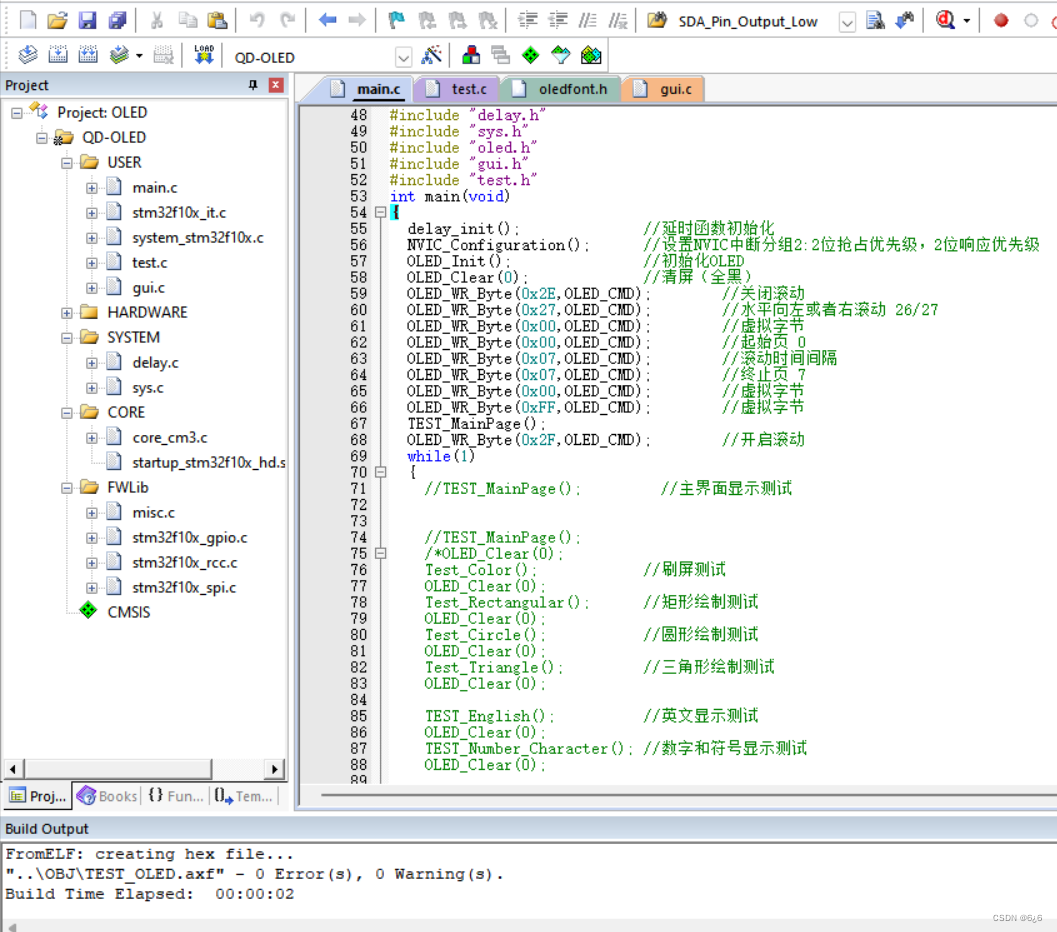
-
烧录
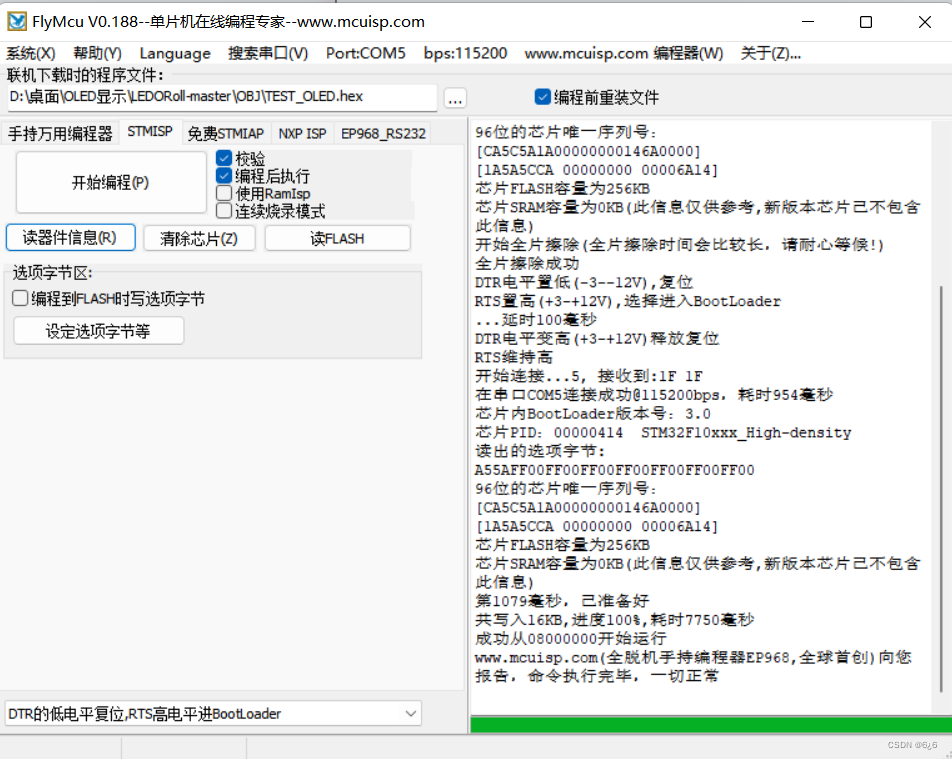
7.5、实现效果
OLED滑动显示长字符
7.6、完整代码
百度网盘:
链接:https://pan.baidu.com/s/13rgixlMhU1Rt9q8LrU5-YA?pwd=2022
提取码:2022
八、总结
本文主要介绍了OLED屏显和汉字点阵编码原理,并在此基础上,使用STM32F103的SPI接口、AHT20温度传感器和OLED屏显,实现了显示学号姓名、显示温湿度、长字符滑动显示。
本次实验的内容较多,实现起来较不容易,完成的时间较长,需要耐心坚持下来。虽然耗时较长,但是当看到OLED屏幕上按照自己的喜好显示相应的内容的时候,心里会感觉到非常的高兴和满足。
然后就是本次实验中遇到的一些问题及解决办法,就是利用OLED屏幕显示温湿度的时候,屏幕会有显示,但是读出来的温湿度一直是0.0,不管怎么改都不能正常显示温湿度。然后我换成了同学的板子,连线的方式一模一样,代码也用的我烧录到自己板子上的代码,但是离谱的就是,在同学的板子上就可以正常显示温湿度了(很玄学)。
后面问了老师,说这里可能是因为电压太低了,不足以支撑OLED和AHT20温湿度传感器一起工作,要接5V。
最后就是硬件学习要坚持动手实践,在实践中“发现问题-分析问题-解决问题”,从而提升自我。
参考列表:
1.SPI协议详解(图文并茂+超详细)
2.SPI原理超详细讲解—值得一看
3.点阵汉字的字模读取与显示
4.基于STM32的0.96寸OLED显示屏显示数据
5.STM32+OLED屏显应用实例