前言:
i.MX8M Plus 开发板是一款拥有 4 个 Cortex-A53 核心,运行频率 1.8GHz;1 个 Cortex-M7 核心,运行频率 800MHz;此外还集成了一个 2.3 TOPS 的 NPU,大大加速机器学习推理。
全文所使用的开发平台均为与NXP官方合作的FS-IMX8MPCA开发板(华清远见imx8mp开发板),支持Weston、ubuntu20.04、Android11 等操作系统;同时支持 Xenomai 硬实时内核、EtherCAT 总线、TSN 时间敏感网络、ROS1.0、ROS2.0 等工业与机器人领域应用;可以用于工业互联网、人工智能、边缘计算、多屏异显等应用方向。华清远见研发中心编写了大量开发教程并录制了丰富视频教学资源免费提供给大家!
开发板更多资料可在评论区下方留言领取~~~
Windows/Linux 开发环境配置
通用调试工具安装
Xshell 7 安装
由于在后续的实验中需要使用到串口调试终端和 ssh 登陆 Linux 操作系统,因此需要 安装一个 调试工具 ,这里以 xshell 为例 ,读者也可以根据自己的个人习惯选择。
Xshell 7 免费版安装包可以从 xshell 官方网站 https://www.netsarang.com/zh/通过邮件申请免费版本,也可以使用资料光盘中【华清远见-I.MX8M Plus 开发资料\01-工具软件】的 Xshell7.0.0056_CandJ_A.exe 安装包进行安装。
双击安装包后会先检查当前系统环境,如果系统依赖不满足则会自动安装缺失的部分。

环境安装完成后将会出现如下界面
点击“下一步”

点击“我接收许可协议中的条款”
选择要安装的默认目录后点击“下一步”
点击“安装”
安装完成会出现如下界面

安装完成后,接入 USB 串口设备。双击桌面上的“XSHELL 6”图标打开。

开启 xshell 后在自动弹出的对话框中单击“新建”按钮。
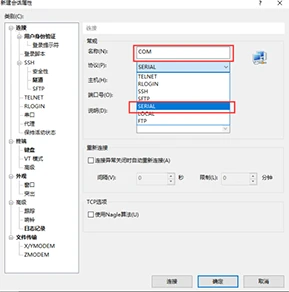
在“新建会话属性”中“协议(P)”中选择“SERIAL”,名称可以自定义。
下面需要对串口进行配置。首先需要确定串口在系统中的 COM 口是哪个端口。可以在设备管理器中查找。
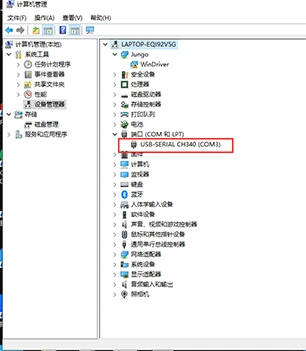
可以看到这里的串口为“COM3”
下面点击 xshell 界面中左侧的“串口”按钮。
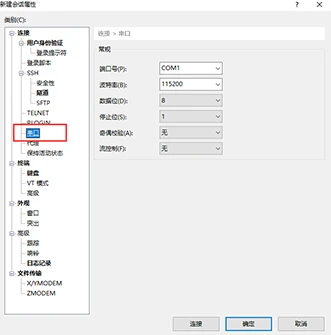
选择端口号为“COM3”(需要根据当前实际环境选择),波特率为:115200,数据位:8,停止位:1,奇偶校验:无,流控制:无。
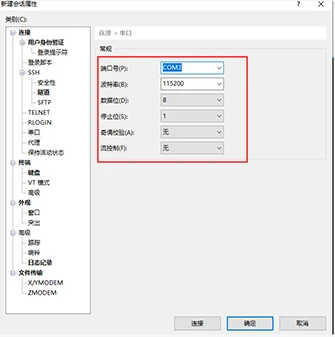
配置好之后点击“确定”按钮。将看到如下界面。
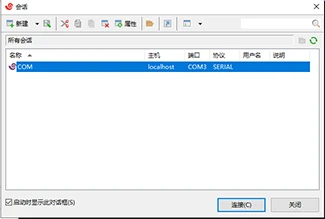
先选中刚刚新建的 COM 选项后点击“连接”。
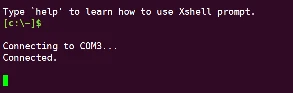
看到如上界面则说明打开成功。
uuu 工具安装
UUU 是飞思卡尔/NXP I.MX 芯片镜像部署工具。
随着时间的推移,uuu 可移植到 Linux 和 Windows 的操作系统下。UUU 在 Windows 系
统和 Linux 系统中的用法相同。这意味着相同的脚本可以在两个操作系统上运行。
⚫ uuu 工具安装
uuu 可以运行在 Windows 下也可以运行在 Ubuntu 中,本例以 Windows 下安装和使用为
例演示 uuu 工具的部署。
uuu 工具可以通过 https://github.com/NXPmicro/mfgtools/releases 网址来下载最新的 uuu 工具,也可使用光盘资料中【工具软件】目录下提供的 uuu.exe 工具。
首先将 uuu.exe 复制到 Windows 主机的任意目录下,这里以【C:\Program Files (x86)\uuu】
目录为例。

为了便于之后能在任意目录下使用 uuu 命令,可以将 uuu.exe 所在路径添加的系统的环境变量中。
在桌面“此电脑”图标上右键,选择属性,在弹出的对话框中找到“高级系统设置”

进入“高级系统设置”页面找到“环境变量”按钮

在环境变量菜单找到“系统环境”下的“Path”环境变量。
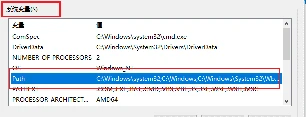
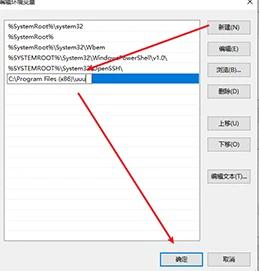
双击“Path”环境变量,在最后面将“C:\Program Files (x86)\uuu”目录添加到 Path 环境变量中,依次点击确定退出即可。
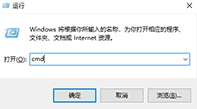
使用“Win+r”快捷键打开快速运行窗口,在窗口中输入“cmd”命令回车。
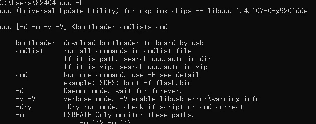
在命令行窗口中输入“uuu -h”可以看到如下提示则说明 uuu 部署成功
⚫ uuu 使用例程
烧录 bootloader (SPL and U-Boot)案例
dos@windows:$ uuu -b spl <bootloader>
烧录 rootfs.wic 镜像到 eMMC
dos@windows:$ uuu -b emmc_all <bootloader> <rootfs.wic>
烧录 Yocto 镜像
dos@windows:$ uuu L4.9.123_2.3.0_8mm-ga.zip
通过脚本烧录 bootloader 到 eMMC
dos@windows:$ uuu -b emmc bootloader
通过脚本烧录 rootfs 到 eMMC
dos@windows:$ uuu -b emmc_all bootloader rootfs.sdcard
更多使用方法可以通过 uuu -h 命令查看
⚫ uuu 工具连接开发板
本小节我们要验证 uuu 工具与开发板的数据连接是否正常。
1) 将电源线、uart 调试线、usb 数据线连接至开发板。
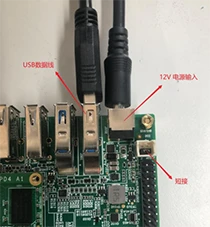
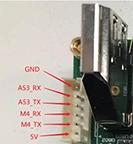
按照上图分别连接USB数据线、电源线、以及调试串口(由下向上分别为5V、M4_TX、M4_RX、A53_TX、A53_RX、GND)。这里我们只连接 GND、A53_RX、A53_TX 三条线。
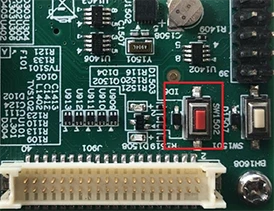
在上电之前我们还需要按住开发板上的红色烧录按钮,让开发板进入烧录模式。
2) 使用串口调试终端,打开对应的 COM 口,设置波特率为 115200,数据长度为 8,停止位为 1,无校验数据格式。
3) 使用“Win+R”快捷键打开快速运行窗口,在窗口中输入“cmd”命令回车。
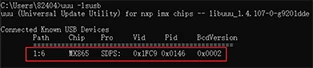
4) 在命令行中输入“uuu -lsusb”可以查看 uuu 与开发板的连接情况。如果连接正常则可以看到当前连接开发的 Chip、Pro、Vid、Pid 等信息,下图即为连接成功。
通用开发工具安装
VMware 安装
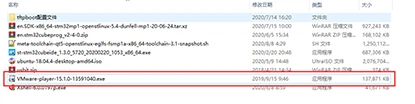
运行资料光盘【华清远见-I.MX8M Plus 开发资料\01-工具软件】目录下的 VMware-player15.1.0-13591040.exe 安装程序。
【VMware Player 安装程序初始化】

【VMware Player 安装向导】
【VMware Player 许可协议】
【更改安装路径】
【选择是否检查更新,加入用户体验改进计划】
【创建快捷方式】
【正在安装】

【安装完成】

【安装完成】
系统安装
Ubuntu18.04 官方标准安装文件可以通过 ubuntu 官方链接:http://releases.ubuntu.com/18.
04.4/下载;也可以使用【华清远见-I.MX8M Plus 开发资料\01-工具软件】目录下的 ubuntu-1
8.04.4-desktop-amd64.iso 安装文件进行安装。
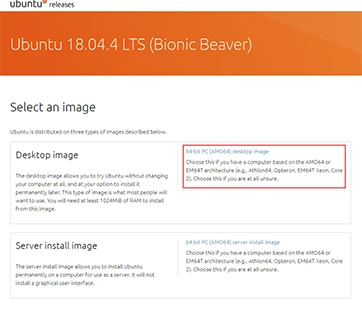
打开链接后点击“64-bit PC (AMD64) desktop image”,切换至新网页并自动开始下载,下载完成后镜像文件为:ubuntu-18.04.4-desktop-amd64.iso
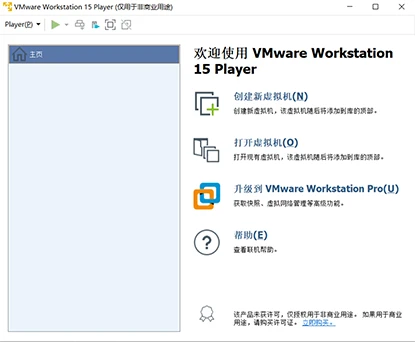
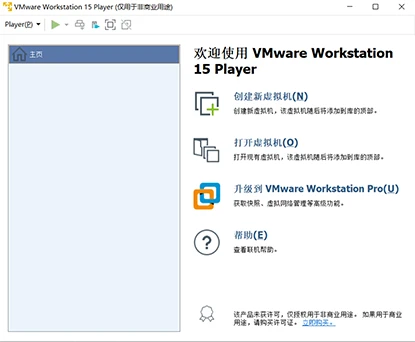
1) 打开 Vmware Player:
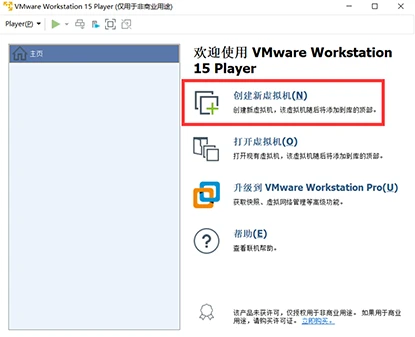
2) 点击 “创建新虚拟机”,弹出安装向导:
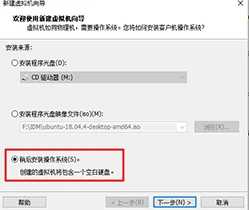
3) 在弹出的对话框中选择“稍后安装操作系统”
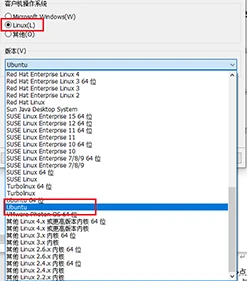
4) 选择客户机操作系统页面中,选择 Ubuntu。
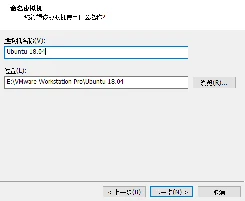
5) 在“虚拟机命名”选项卡可以为 ubuntu 虚拟机修改名称,设置安装路径
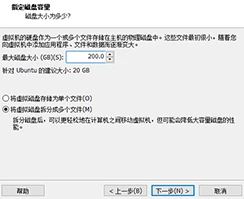
6) “指定容量”选项卡设置磁盘不少于 150GB。推荐 200GB,如果需要编译机器视觉相关镜则需要至少 250GB。之后选择“将虚拟磁盘拆分成多个文件”方便后期虚拟机移动
7) 虚拟机创建完成:自定义硬件按钮可以自定义可以定制虚拟机配置,本章节使用默认配置即可,后期如需调整根据需求适当调整,勾选 “创建后开启此虚拟机”点击“完成”按钮完成虚拟机的创建并开始安装 Ubuntu。

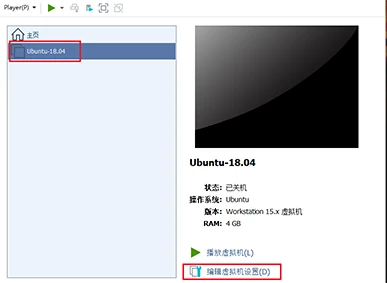
8) 创建完成后可以看到生成了一个“Ubuntu-18.04”虚拟机。

9) 点击“编辑虚拟机设置”,选择“CD/DVD(STAT)”选项。
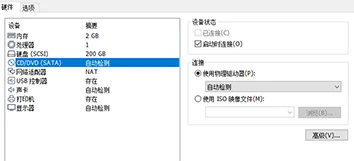
10) 点击“使用 ISO 映像文件”选项,再点击“浏览”按钮在弹出的浏览 ISO 镜像窗口中找到下载好的 Ubuntu 镜像文件,并点击“打开”按钮:

选择好镜像后,点击“确定”按钮然后启动虚拟机。
稍等片刻后将看到 ubuntu 的安装引导界面。
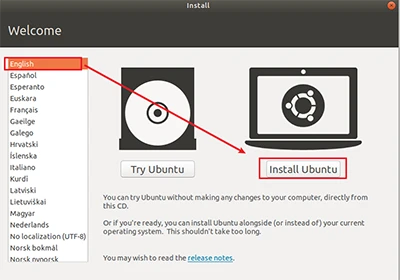
⚫ Welcome
选择默认语言,这里可以选择“中文”、“English”。然后点击“Install Ubuntu”
⚫ Keyboard layout
选择默认的键盘即可
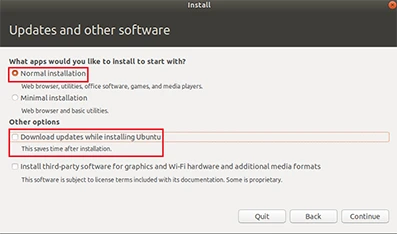
⚫ Updates and other software
这里选择标准安装,将“Download updates while installing Ubuntu”选项取消。
⚫ Installation type
这里选择默认选项“Erase disk and install Ubuntu”
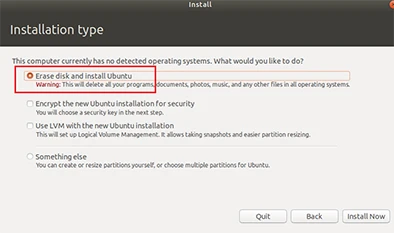
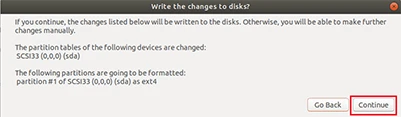
点击“Install Now”开始安装后点击“Continue”
⚫ Where are you
选择时区为“Shanghai”

⚫ Who are you
这里设置 linux 下的主机名称与用户名称以及密码,这里设置用户名称为“linux”,密码为“1”,主机名称为“linux-PC”。

⚫ 开始安装
安装过程根据电脑性能不同时间上会有差异,需要耐心等待一段时间
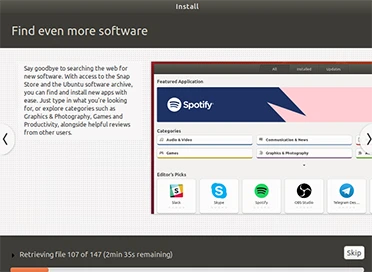
注意:安装过程中请勿点击“Skip”按钮。
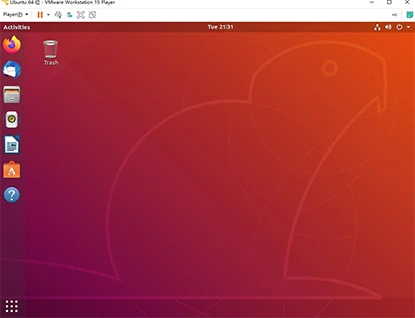
安装完成后系统自动启动
由于 TFTP 或者 NFS 在本章节中都基于 VMware 下的 ubuntu 进行服务器的搭建,因此在进行实验之前需先将 VMware 的实验环境配置好,方便后续实验。
本例中我们采用网线直连和通过路由连接两种方法,来向大家演示。
不论是网线直连还是通过路由的方式,这两种方式都是通过有线网络进行通讯,因此我们首先需设置 VMware 的桥接方式,在之前的章节中我们已经介绍过如何将虚拟机设置成桥接模式了。现在我们要设置指定的有线网卡进行桥接。
a) VMware Workstation Player
如果您安装的是 VMware 的免费版本,则需要针对具体的每个虚拟机设置对应的桥接模式。
首先选中要设置的虚拟机,然后点击“编辑虚拟机设置”
在弹出的对话框中依次选择“网络适配器”->“配置适配器”之后会弹出对话框
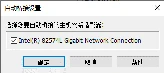
这里需要选择自己电脑相对应的有线网卡,将其它的网卡取消选中。这样选中的虚拟机就会自动将网卡桥接到有线网卡上了。
b) VMware Workstation Pro
如果您使用的是收费版本的 VMware,则需要将所有的虚拟机都关闭,然后依次选择“编辑”->“虚拟网络编辑器”将弹出如下界面

这里如果我们不是以管理员身份运行程序,则需要先点击窗口右下角的“更改设置”按钮来提示权限。设置完成之后可以在当前的窗口看到多出一个“VMnet0”的虚拟网卡。如果打开改界面默认就有此选项可跳过这一步
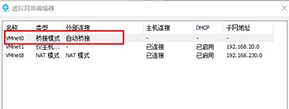
选中“VMnet0”网卡,在桥接模式选项,选择成自己电脑相对应的有线网卡。例如这里为“Realtek PCIe GBE Family Controller”

设置完成点击确定即可。需要注意的是这种设置方法是全局设置对所有虚拟机都起作用,如果其它虚拟机要使用其它网卡,需自行修改成对应网卡。
配置 ubuntu18.04 虚拟机
现在 Ubuntu 18.04 操作系统已经安装完成了,但是为了后续开发方便还需要对系统进行
进一步的配置与修改。
a) 安装 VMware Tools
1)选择 VMware 菜单栏下的“虚拟机”选项卡下的“安装 VMware Tools”选项。

2)在安装好的 ubuntu18.04 系统中可看到“VMware Tools”DVD 光盘。

3)打开光盘可以看到如下文件。
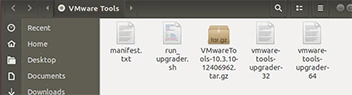
4)将 VMwareTools-10.3.10-12406962.tar.gz 压缩包复制到左侧的 Downloads 文件夹中。
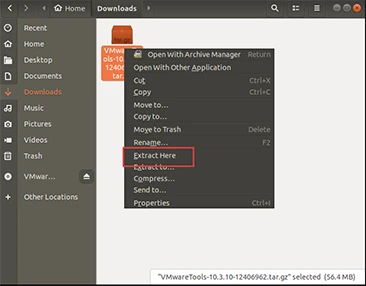
5)选中该文件右键选择“Extract Here”选项,进行解压
6)解压完成后会生成一个文件夹

7)进入 VMwareTools-10.3.10-12406962/vmware-tools-distrlib 文件夹。

8)在该文件夹空白处右键,选择“Open in Terminal”选项,打开一个终端。
9)执行 vmware-install.pl 脚本。
linux@ubuntu:$ sudo ./vmware-install.pl
输入密码 1 后看到如下界面

输入 yes
之后的选项全部默认“回车键”
10) 安装完成默认如下图所示。
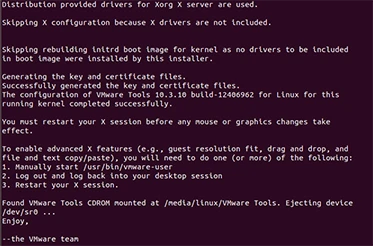
10)重启系统。
linux@ubuntu:$ sudo reboot
b)启用共享文件夹
在启用共享文件夹前请确保 VMwareTools 已经正确安装。
为了便于后续 Ubuntu 与主机直接的文件传输可以启用虚拟机的共享文件夹将主机上的一个文件夹挂载到 Ubuntu 系统中。
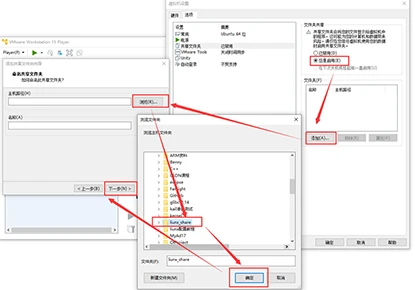
在主机上任意位置建立一个用于共享文件的文件夹。(这里以 G:\liunx_share 为例)点击“编辑虚拟机设置”找到“选项”下的共享文件夹。
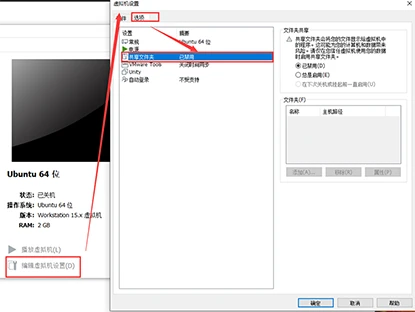
选择界面右侧的“总是启用”选项后添加一个共享文件夹
添加完成后如下界面中选中“启用此共享”后点击”完成
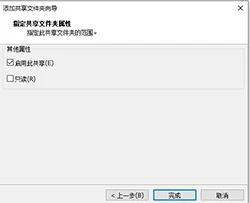
点击完成后就可以看到刚刚添加的文件夹路径了

开启虚拟机之后在/mnt/hgfs 就可以看到共享的文件夹了
c) 常用工具安装
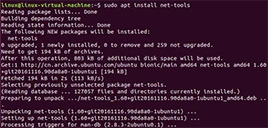
1)net-tools 安装
从 ubuntu18.04 版本开始,在系统中默认不支持 ifconfig 命令进行网络状态查看。需要安装 net-tools 方可使用。
linux@ubuntu:$ sudo apt-get update
linux@ubuntu:$ sudo apt install net-tools
2)vim 安装
系统安装完成后自带的文本编辑器是 vi 编辑器,这里推荐使用 vim 编辑器进行文本编
辑。
linux@ubuntu:$ sudo apt-get update
linux@ubuntu:$ sudo apt-get install vim

为了后续开发方便可以为 vim 安装一些辅助插件。将【华清远见-I.MX8M Plus 开发资料
\01-工具软件】目录下的 jeffy-vim-read.tar.gz 压缩包导入到虚拟机中。
解压缩
linux@ubuntu:$ tar -xvf jeffy-vim-read.tar.gz
解压成功后会得到 jeffy-vim-read 文件夹,进入该文件夹下进行插件安装。
linux@ubuntu:$ ./install.sh

选择 y
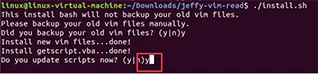
选择 y,之后出现如下界面
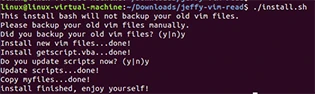
安装完成出现如下提示
安装 ctags
linux@ubuntu:$ sudo apt-get install ctags
3)openssh 安装
linux@ubuntu:$ sudo apt-get update
linux@ubuntu:$ sudo apt-get install openssh-server
d) 安装 TFTP 服务器
linux@ubuntu:$ sudo apt-get update
linux@ubuntu:$ sudo apt-get install tftp-hpa tftpd-hpa
在根目录下建立 tftp 工作目录
linux@ubuntu:$ sudo mkdir /tftpboot
修改 tftpboot 文件夹权限
linux@ubuntu:$ sudo chown linux:linux /tftpboot/
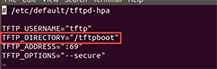
linux@ubuntu:$ sudo vi /etc/default/tftpd-hpa
将 TFTP_DIRECTORY="/var/lib/tftpboot"修改为 TFTP_DIRECTORY="/tftpboot
重启 tftp 服务
linux@ubuntu:$ sudo service tftpd-hpa restart
e) 安装 NFS 服务器
linux@ubuntu:$ sudo apt-get update
安装 NFS 服务器端
linux@ubuntu:$ sudo apt-get install nfs-kernel-server
安装 NFS 客户端
linux@ubuntu:$ sudo apt-get install nfs-common
建立 NFS 共享目录
linux@ubuntu:$ sudo mkdir /source
linux@ubuntu:$ sudo chown linux:linux /source
linux@ubuntu:$ mkdir /source/rootfs
添加共享目录
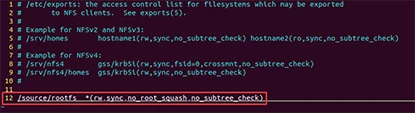
linux@ubuntu:$ sudo vi /etc/exports
若需要把 “/source/rootfs” 目录设置为 NFS 共享目录,在该文件末尾添加下面的一行:
1 /source/rootfs *(rw,sync,no_root_squash,no_subtree_chec
使能 NFS V2 版本
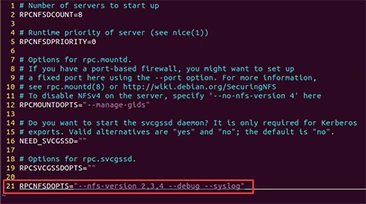
linux@ubuntu:$ sudo vi /etc/default/nfs-kernel-server
在文件的最后添加下面的配置
1 RPCNFSDOPTS="--nfs-version 2,3,4 --debug --syslog"
重启 NFS
linux@ubuntu:$ sudo /etc/init.d/nfs-kernel-server restart
f) Git 工具安装
linux@ubuntu:$ sudo apt-get updat
安装 Git
linux@ubuntu:$ sudo apt install git
创建用户
linux@ubuntu:$ git config --global user.name "Your Name"
linux@ubuntu:$ git config --global user.email "[email protected]
这里的“Your Name”与 [email protected] 依据实际情况设置即可。
设置配色方案
linux@ubuntu:$ git config --global color.status auto
linux@ubuntu:$ git config --global color.diff auto
linux@ubuntu:$ git config --global color.branch auto
linux@ubuntu:$ git config --global color.interactive aut
Cortex-M7 环境搭建
Cortex-M7 开发主要使用 IAR 9.10 版本进行开发,下面以 Windows 为例进行 IAR 9.10 的
环境安装,以及 SDK_2.9.0_EVK-MIMX8MP 开发包的导入。
a) 安装 IAR 9.10
打开【华清远见-I.MX8M Plus 开发资料\工具软件】目录下的 EWARM-CD-9101-36323.exe 安装程序
首先会进行文件解压
解压完成后会出现如下界面
在如上界面中选择第一项,将会弹出如下界面
在如上界面点击“Next”按钮
在 License Agreement 界面,选择“I accept the terms of the license agreement”选项后点击
“Next”按钮
在 Choose Destination Location 界面可以选择安装路径
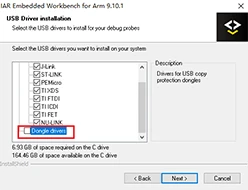
在 USB Driver installation 界面将“Dongle drivers”选项去掉,点击 Next
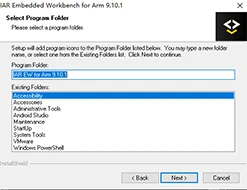
Select Program Folder 界面直接点击“Next”
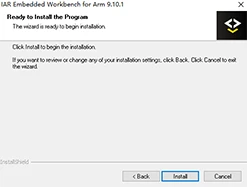
Ready to install the Program 界面点击“Install”按钮开始安装
安装完成如下图所示
点击“Finish”按钮之后会继续提示安装各种仿真驱动的驱动程序,默认都安装即可,这里就不再一一举例。

b)安装 IMX8MP 插件
将【华清远见-I.MX8M Plus 开发资料\工具软件】目录下的 iar_segger_support_patch_imx
8mp.zip 压缩包解压后得到 arm.zip、JLink.zip 两个压缩包。
1) 将 arm.zip 压缩包里的 arm 文件夹复制到 IAR 安装目录下的 IAR Systems\Embedded
Workbench 9.0 目录下,合并原有 arm 文件夹中的内容。
2) 将 JLink.zip 压缩包里的 JLink 文件夹复制到 SEGGER 的安装目录下,默认在“C:\Pr
ogram Files (x86)\SEGGER”合并原有 JLink 文件夹即可。
Android 开发环境搭建
Android 开发环境分为“Android 系统编译环境”和“Android studio”两部分组成。其中
“Android 系统编译环境”为 Android11 系统编译需要在 Ubuntu 中安装,“Android studio”
为 Android APP 开发环境需要在 Windows 下安装。
Android 系统编译环境
Android11 编译建议在 Ubuntu18.04 环境下,此外硬件环境需要提供至少:
⚫ 200GB 磁盘空间
⚫ 16GB 内存空间
此外 ubuntu 系统还需要安装如下应用包:
linux@ubuntu:$ sudo apt-get update
linux@ubuntu:$ sudo apt-get install uuid uuid-dev zlib1g-dev liblz-dev liblzo2-2 liblzo2-dev \
lzop git-core curl u-boot-tools mtd-utils android-tools-fsutils device-tree-compiler \
gdisk m4 libz-dev bison flex libssl-dev gcc-multilib
Android Studio
随着 Android Studio 的成熟,越来越多的开发者选择 Android Studio 作为开发平台,本文
介绍了如何搭建 Android Studio 开发环境。
本小节以 Windows 下安装过程为例。来安装 Android Studio
⚫ 安装 android-studio
打开【华清远见-I.MX8M Plus 开发资料\工具软件】目录下的 android-studio-ide-202.7351
085-windows.exe 安装程序

在欢迎界面点击“Next
在功能选择窗口可以选择是否安装 android 虚拟设备,用于仿真调试
此页面可以设置安装路径
接下来点击“Install”按钮开始安装
稍等片刻后即可安装完成
⚫ 安装 SDK
点击“Finish”按钮后,会启动 Android Studio,首次启动会提示如下界面,选择不导入设置
之后在启动过程中会提示如下警告点击“Cancel”即可

之后会弹出 SDK 安装窗口,点击“Next”
下面会提示安装 SDK 版本为 android 30 的 SDK
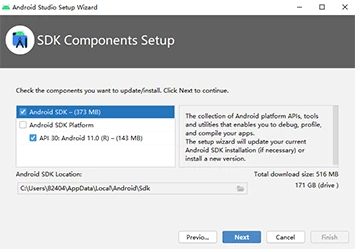
点击“Next”进行下一步的安装,这里需要在可以连接网络的环境下运行

点击“Finish”会自动下载 Android 11 SDK 并安装。
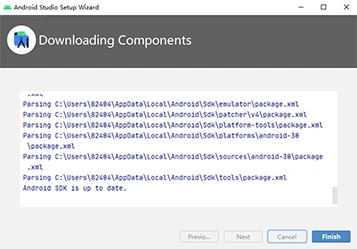
安装完成后如上图所示,点击“Finish
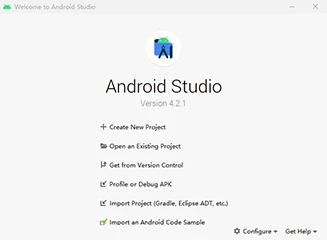
之后就可以看到 Android Studio 的欢迎界面了
⚫ 安装 NDK
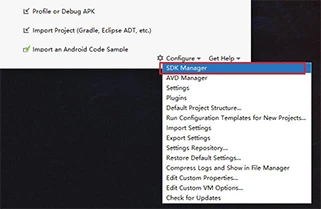
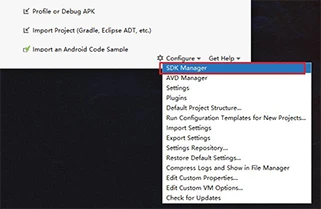
接下在进行 NDK 安装,点击欢迎界面右下角的 Configure->SDK Manager 按钮
在弹出的对话框中找到“SDK Tools”选项卡找到“NDK”选项勾选
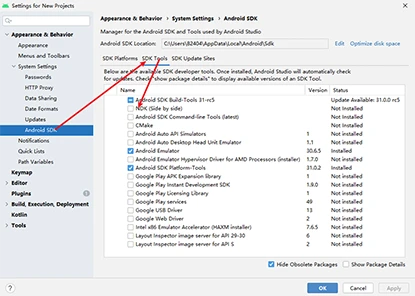
之后点击“OK”按钮
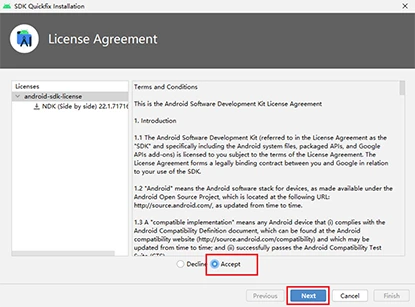
之后会提示确认信息
在弹出的对话框中选择“Accept”之后点击“Next”
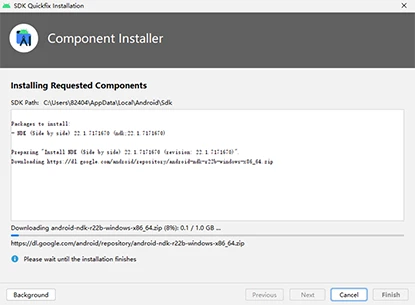
之后会自动下载所需文件并安装
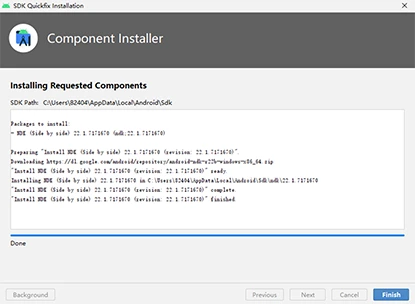
安装完成如上所示
⚫ 导出相关环境变量
点击欢迎界面右下角的 Configure->SDK Manager 按钮
在弹出的对话框中找到“SDK Platforms”选项卡,找到“Android SDK Location”选项打开后面的 Sdk 路径
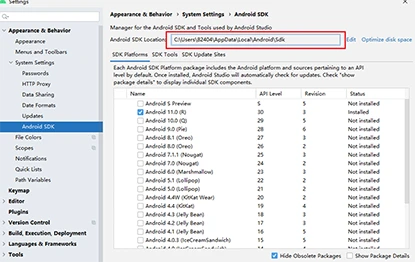
由上图可以看到 Sdk 所在路径为“C:\Users\82404\AppData\Local\Android\Sdk”,打开该路径内容如下
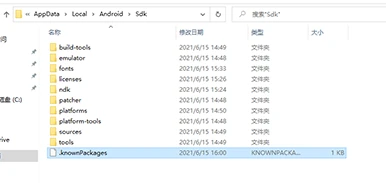
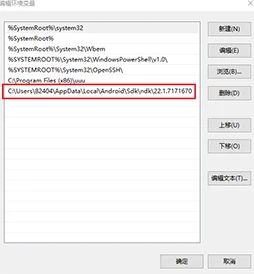
在该路径下依次找到 ndk->22.1.7171670 该路径即为 NDK 的安装路径。这里需要注意的是“22.1.7171670”为 NDK 的版本号,由于默认会下载最新版本,所以此处可能会有些变化。现在我们得到了 NDK 所在路径为“C:\Users\82404\AppData\Local\Android\Sdk\ndk\22.1.7171670”我们将该路径添加到环境变量中。
在桌面“此电脑”图标上右键,选择属性,在弹出的对话框中找到“高级系统设置”

进入“高级系统设置”页面找到“环境变量”按钮

在环境变量菜单找到“系统环境”下的“Path”环境变量。
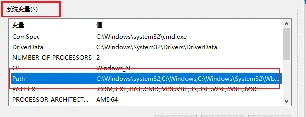
双击“Path”环境变量,在最后面将“C:\Users\82404\AppData\Local\Android\Sdk\ndk\22.
1.7171670”目录添加到 Path 环境变量中,依次点击确定退出即可。
使用“Win+r”快捷键打开快速运行窗口,在窗口中输入“cmd”命令回车。
在命令行窗口中输入“ndk-build --version”可以看到如下提示则说明 ndk-build 环境变量导入成功。

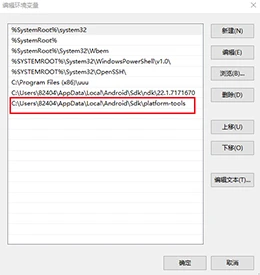
接下来导入 platform-tools ,这里我们直接打开前面已经得到的 Sdk 所在路径
“C:\Users\82404\AppData\Local\Android\Sdk”在该路径下找到 platform-tools 文件夹,同样将
该文件夹所在路径添加到环境变量中
然后在 CMD 终端中输入“adb --version”看到如下提示即为成功

官方 Linux BSP 开发环境搭建
交叉编译工具链安装
⚫ fsl-imx-xwayland-glibc 交叉编译工具链
fsl-imx-xwayland-glibc 是 imx-image-multimedia 定制发行版的软件开发套件,它提供了独立的交叉开发工具链和针对特定镜像中所使用到的特定链接库。
开发资料光盘中提供的 SDK 是基于 imx8m plus 开发板的定制交叉编译工具链,该工具链可用于 imx8m plus 开发板中所有项目的编译与调试。
将资料光盘下【华清远见-I.MX8M Plus 开发资料\01-工具软件】的 fsl-imx-xwayland-glib
c-x86_64-imx-image-multimedia-aarch64-imx8mpevk-toolchain-5.4-zeus.tar.xz 复制到 ubuntu 主机中进行解压。
linux@ubuntu: $ tar -xvf fsl-imx-xwayland-glibc-x86_64-imx-image-multimedia-aarch64-i
mx8mpevk-toolchain-5.4-zeus.tar.xz
解压之后得到 fsl-imx-xwayland-glibc-x86_64-imx-image-multimedia-aarch64-imx8mpevk-tool
chain-5.4-zeus 目录,进入到该文件夹之后内容如下。

执行 fsl-imx-xwayland-glibc-x86_64-imx-image-multimedia-aarch64-imx8mpevk-toolchain-5.
4-zeus.sh 安装脚本。
linux@ubuntu: $ ./fsl-imx-xwayland-glibc-x86_64-imx-image-multimedia-aarch64-imx8mpe
vk-toolchain-5.4-zeus.sh
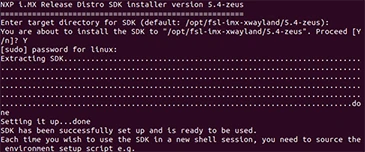
运行之后会提示输入安装位置,直接按回车键默认即可:

继续询问是否安装 SDK,输入 Y,回车

安装,过程中需要输入用户的 sudo 密码(如果当前用户 sudo 功能已经授权,这个密码就是用户的登录密码),输入密码后开始进行安装。

输入密码后等待安装,安装后显示如下:
导入 sdk
linux@ubuntu: $ source /opt/fsl-imx-xwayland/5.4-zeus/environment-setup-aarch64-poky-li
Nux
验证开发工具是否安装正确,显示版本信息如下图所示。
linux@ubuntu: $ $CC --version

⚫ imx-robot-xwayland 交叉编译工具链
imx-robot-xwayland 交叉编译工具链是专为 AI-Robot 系统定制的交叉编译工具链,其安装过程与 fsl-imx-xwayland-glibc 相同,用户可参考 fsl-imx-xwayland-glibc 交叉编译工具链的
步骤进行安装。
这里 imx-robot-xwayland 安装包的名称为 imx-robot-xwayland-glibc-x86_64-imx-robot-syst
em-rt-kinetic-aarch64-imx8mp-ai-robot-toolchain.tat.xz
Yocto 开发环境搭建
Yocto 推荐在 Ubuntu18.04 环境下编译,在编译 Yocto 之前,首先需要安装以下应用包:
linux@ubuntu:$ sudo apt-get update
linux@ubuntu:$ sudo apt-get install gawk wget git-core diffstat unzip texinfo gcc-multilib \
build-essential chrpath socat cpio python python3 python3-pip python3-pexpect \
xz-utils debianutils iputils-ping python3-git python3-jinja2 libegl1-mesa libsdl1.2-dev \
pylint3 xterm
注意:如果之前没有对 git 工具进行配置,需按照《Git 工具安装》章节对 Git 工具进行配置。