一、SPI总线传送数据和读取数据,AD转换实现读取电位器的值。
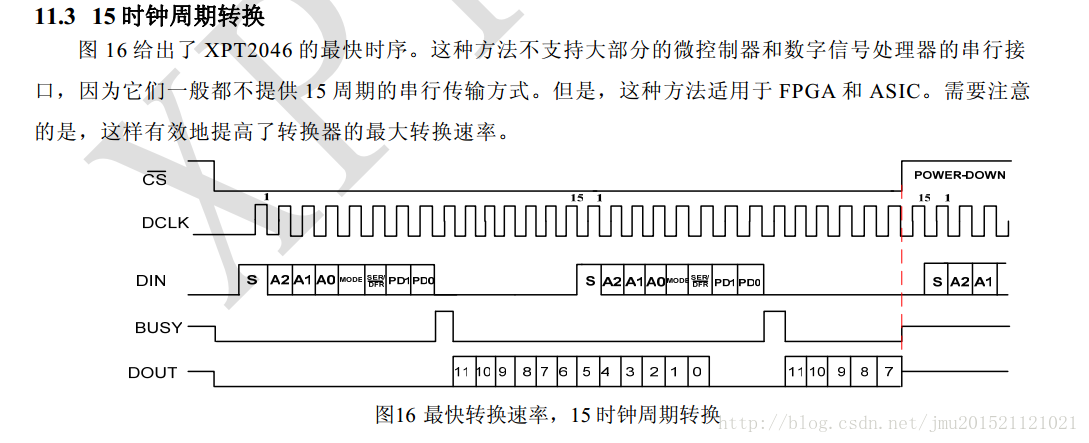
XPT2046 时序图
SPI总线写数据,赋予DIN数据->上升沿写入
void SPI_Write(uchar dat) { uchar i; CLK = 0; for(i=0; i<8; i++) { DIN = dat >> 7; //右移七位,最高位先写入 dat <<= 1; CLK = 0; //产生上升沿放置数据到DIN CLK = 1; } }
SPI总线读取数据。下降沿读取数据到DOUT。
uint SPI_Read(void) { uint i, dat=0; CLK = 0; for(i=0; i<12; i++) //读取12位数据 { dat <<= 1; //先读取最高位 CLK = 1; CLK = 0; //下降沿放置数据 dat |= DOUT; } return dat; }读取AD转换输出数字值。CS = 0,CLK = 0–> SPI写入命令->DPI读取AD转换结果。
uint Read_AD_Data(uchar cmd) { uchar i; uint AD_Value; CLK = 0; CS = 0; SPI_Write(cmd); //写入AD转换命令 for(i=6; i>0; i--); //等待AD转换 CLK = 1; //产生一个时钟周期清除BUSY _nop_(); _nop_(); CLK = 0; _nop_(); _nop_(); AD_Value=SPI_Read(); //读取转换结果 CS = 1; //恢复 return AD_Value; }
二、DA转换,产生PWM波
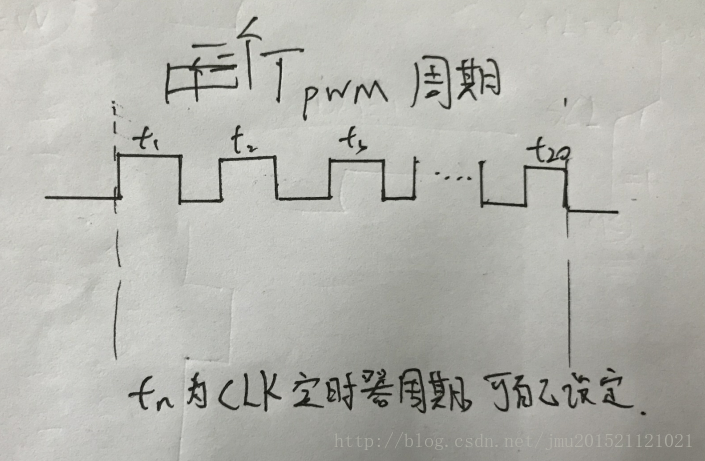
PWM波。通过周期定时器产生一个周期PWM波。比如把一个PWM波=20个定时器周期。即
Tpwm = 20TCLK
- 定时器设置和PWM产生
u8 step = 20; void Timer0Init() //初始化 { TMOD|=0X01;//定时模式为0,工作模式为1 TH0=0XFC; //赋值 TL0=0X18; ET0=1;//打开定时器中断 EA=1;//打开总中断 TR0=1;//打开定时器TRO } void Timer0() interrupt 1 //中断函数 { static u16 timer; TH0=0XFC; //定时周期为1ms TL0=0X18; timer++; //用来计数 if(timer>(int)p) //大于电位器输出值在20上的投影 { led = 1; //灯灭 } else led = 0; //灯亮 if(timer == step){ //20个定时周期清除一次,step = 20 timer = 0; } }