- 介绍 Introduction
定义并描述功能,功能逻辑,功能与驾驶员、环境和其它要素的依赖性和相互影响。为充分理解功能提供支持,以便支持后续阶段的研发活动。
To define and describe the function, its function logic, dependencies on, and interaction with, the driver, the environment and other elements at the vehicle level. To support an adequate understanding of the function so that the activities in subsequent phases can be performed.
此文档准备用于:整车功能负责人、零部件负责人、总线负责人、架构负责人、整车功能安全负责人、零部件功能安全负责人执行后续研发活动的参考信息。
This document is intended to be used by: Provide reference information for vehicle function owners,component owners, bus design owners,architecture owners, vehicle functional safety owners, component functional safety owners performing the designing activity of the functional.
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅所注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
The following referenced documents are indispensable for the application of this document. For dated references, only the edition cited applies. For undated references, the latest edition of the referenced document (including any amendments) applies.
表1 参考文档 Table1 References Documents
-
- 文档的维护 Maintenance of the Document
长城公司的整车功能负责人负责本文档的编制、维护及更新。本文档以中英文两种语言书写,两种语言表述不一致时,以中文为准。
GWM vehicle function owner is responsible for the document creation, maintenance and updating. This document is executed in Chinese and English. In case of inconsistency between the Chinese language version and the English language version, the Chinese language version shall prevail.
表2 缩略词 Table2 Abbreviations
| 缩略词Abbreviation |
英文定义 English Definition |
中文定义 Chinese Definition |
| ECU |
Electronic Control Unit |
电子控制单元 |
| E/E |
Electrical/ Electronic |
电子电气 |
| HUT |
Head Unit System |
导航主机系统 |
| IP |
Instrument Panel |
仪表系统 |
| IFC |
Intelligent Forward View Camera |
智能前视摄像系统 |
| iPAS |
Integration Park Assistant System |
集成式泊车辅助系统 |
| HAP |
Highly Automatic Parking |
高级自动泊车 |
| GW |
Gate Way |
独立网关 |
| ADAS |
Advanced Driver Assitance Systems |
高级自动驾驶 |
| CAN |
Controller Area Network |
控制器局域网络 |
| CANFD |
CAN with Flexible Date-Rate |
带可变速率的控制器局域网 |
| BD |
Body |
车身 |
| Private |
Private |
私有的 |
| DG |
Diagnostic |
诊断 |
| TesterInterface |
TesterInterface |
诊断接口 |
本文档的结构如表3所示:
表3 文档概述 Table 3 Document Overview
| 序号No. |
章节名 Chapter Name |
概述 Overview |
| 1 |
功能场景 |
功能应用的场景 |
| 2 |
功能逻辑 |
功能的各种逻辑 |
| 3 |
功能框图 |
功能框图 |
| 4 |
功能映射 |
功能逻辑到硬件的映射 |
| 5 |
功能接口 |
对功能的接口进行详细的定义 |
| 6 |
故障诊断 |
根据功能逻辑和功能架构,分析功能潜在的故障及其失效安全模式 |
| 7 |
对其他功能的需求 |
本功能对于其他功能的需求 |
| 8 |
其他功能的需求 |
其他功能对本功能的需求 |
| 9 |
非功能需求 |
性能、安全、法律等非功能需求 |
| 10 |
操作模式 |
功能的操作模式和各个模式之间的转换关系 |
| 11 |
历史故障 |
功能的历史故障及其原因 |
<明确整车级功能所包含的系统级功能,所有的系统功能是为该整车级功能的开发边界。在后面的章节对功能区域进行详细的设计开发>功能区域确定整车级功能的开发边界。(详细内容参考FFL)
本文档包含的功能区域如表4所示:
表4 功能区域 Table 4 Function Area
| 序号No. |
功能区域 Function Area |
概述 Overview |
| 1 |
右向辅助 |
通过判断驾驶员有右向行驶意图时,借用ADAS右侧角雷达和HAP雷达摄像头的识别能力,输出右侧障碍物信息,用以HUT界面提醒。增加驾驶安全性。 |
本文档成熟度如表5所示:
表5 文档成熟度
| 序号 |
功能区域 |
状态 |
备注 |
| 1 |
右向辅助 |
OK |
- Function Area <右向辅助功能>
左舵驾驶时,右侧视野受到车身和内饰的影响,存在右侧 A 柱盲区约 8°、右侧 B 柱盲区约 5°、右侧后视镜盲区约 60°及右侧车尾盲区约 5°。驾驶员在右向超车、变道及转弯等行为时存在盲区风险。
为降低用户右向盲区的影响,HUT通过判断驾驶员有右向行驶意图时,借用ADAS右侧角雷达和HAP雷达摄像头的识别能力,复用右侧障碍物输出信息, 在HUT界面做视觉提醒。以此增强驾驶安全性,提升座舱科技跟和智能化水平。
其功能场景如下图所示:
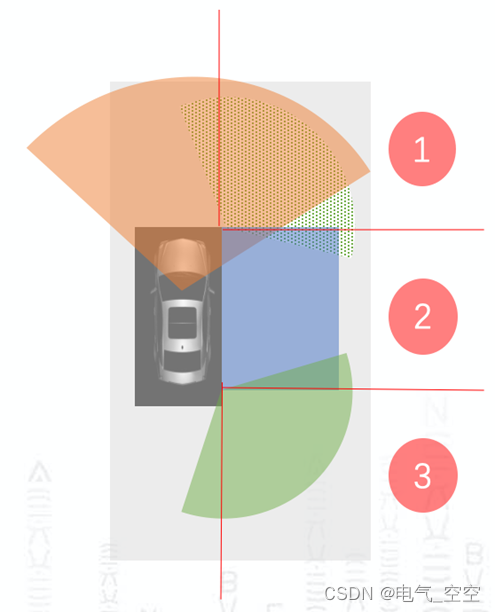
功能用例如下图所示:
功能清单如下表所示:
| 序号No. |
功能区域 Function Area |
概述 Overview |
| 1 |
右向行驶行为触发 Drive Right To Trigger |
右向辅助功能触发根据右转向灯、导航向右变道提示、预测规则三种条件触发。 功能退出根据右转向关闭、预测右转向行为结束两种条件退出。 |
| 2 |
右前障碍物提醒 Right Front Obstacle Warning |
判断驾驶有右转意图时,HUT借用ADAS模块右前角雷达和前视摄像头识别能力,接收右前最近1个目标信息,根据紧急程度界面显示相应视觉提醒。 |
| 3 |
右中障碍物提醒 Right Middle Obstacle Warning |
判断驾驶有右转意图时,HUT借用HAP模块右角雷达、摄像头或内置AVM摄像头识别处理能力,接收右中目标信息,HUT界面显示相应区域视觉提醒。 |
| 4 |
右后障碍物提醒 Right Rear Obstacle Warning |
判断驾驶有右转意图时,HUT借用ADAS模块右后角雷达识别能力,接收右后目标信息和报警信号,根据紧急程度界面显示相应视觉提醒。 |
右向辅助功能触发总共有三种条件,分别为转向灯、导航向右变道提示信息及预测规则。
右向辅助功能退出总共有两种条件,分别为转向灯及预测规则。
当右向转向灯打开时则触发功能;右侧转向灯关闭时则退出功能。
当接收到导航向右变道提示信息则触发功能,接收到右变道完成后功能退出。
当预测规则输出为存在右向行驶意图时触发功能;输出为右向行驶行为结束时退出功能。由预测规则触发「右向辅助」功能超时退出限制为 10s(可配置)。