倾斜摄影三维模型轻量化点云处理关键技术浅析

倾斜摄影三维模型轻量化点云处理是数字地形建模领域中的重要环节,它能够处理大规模地形数据,使其更易于存储、传输、处理和可视化。本文将对倾斜摄影三维模型轻量化点云处理的关键技术进行探讨。
一、点云滤波
点云滤波是点云轻量化处理中的关键步骤,通过去除不必要的点云数据来降低点云的复杂度。常见的点云滤波算法包括高斯滤波、均值滤波、中值滤波等。其中,高斯滤波算法是一种线性滤波算法,常用于去除点云数据中的噪声,并且可以保留原始数据的边缘信息。均值滤波算法则是一种简单的平滑滤波算法,可以在一定程度上减少点云数据中的噪声点。中值滤波算法则是一种非线性滤波算法,可以有效地去除点云数据中的局部异常值。
二、点云采样
点云采样是点云轻量化处理中的另一个重要步骤,通过在原始点云数据中提取关键点来减小数据量。常见的点云采样算法包括基于体素的下采样、基于距离的采样、基于曲率的采样等。其中,基于体素的下采样算法将原始点云数据分割成一系列小体素,选择其中一个代表点作为采样点,从而实现点云数据的降采样。基于距离的采样算法则是根据点云数据中点间的距离进行采样,选取距离较远的点作为采样点,从而实现点云数据的稀疏化。基于曲率的采样算法则是根据点云数据中点的曲率进行采样,选取曲率比较高的点作为采样点,从而保留点云数据中的重要特征。
三、点云压缩
点云压缩是点云轻量化处理中的另一个核心技术,可以通过对点云数据进行压缩来实现数据的快速传输和存储。常见的点云压缩算法包括无损压缩算法和有损压缩算法。无损压缩算法主要包括哈夫曼编码、算术编码等,可以实现对点云数据的无损压缩。有损压缩算法则主要包括基于误差限制的压缩算法、基于小波变换的压缩算法等,虽然会引入一定的误差,但可以实现更高程度的数据压缩。
四、点云可视化
点云可视化是点云轻量化处理中的重要环节,可以将处理后的点云数据以直观的方式呈现出来。常用的点云可视化技术包括OpenGL、WebGL等。其中,OpenGL是一种跨平台图形库,支持多种操作系统和编程语言,可以实现高效的三维点云可视化。WebGL则是一种新兴的Web图形标准,可以在Web浏览器中实现高性能的三维图形渲染,而且不需要安装插件。
五、点云重建
点云重建是点云轻量化处理中的重要应用之一,它可以通过点云数据生成一个三维模型。常见的点云重建算法包括表面重建算法、体素重建算法等。其中,表面重建算法主要是将点云数据转换成三角网格表示,从而生成一个连续的曲面模型。体素重建算法则是将点云数据分割成一个个小立方体(或称为体素),根据每个体素中点云数据的密度和分布情况生成相应的表面模型。这些算法可以帮助用户更好地理解和分析点云数据,同时也可以在一定程度上实现点云轻量化处理。
综上所述,倾斜摄影三维模型轻量化点云处理技术是数字地形建模领域中的关键技术之一。通过点云滤波、采样、压缩、可视化和重建等处理,可以使原始点云数据更易于存储、传输、处理和可视化,并且在一定程度上减小数据量和复杂度,提高数据处理和分析的效率。
六、三维模型轻量化软件
如何实现超大规模的倾斜摄影三维模型的高质量的轻量化压缩,快速高效的处理工具软件非常重要,保证轻量化数据大小合适和质量达标,降低存储和传输成本、提高可视化性能和拓展应用场景。下面介绍一款快速高效的三维模型轻量化软件。
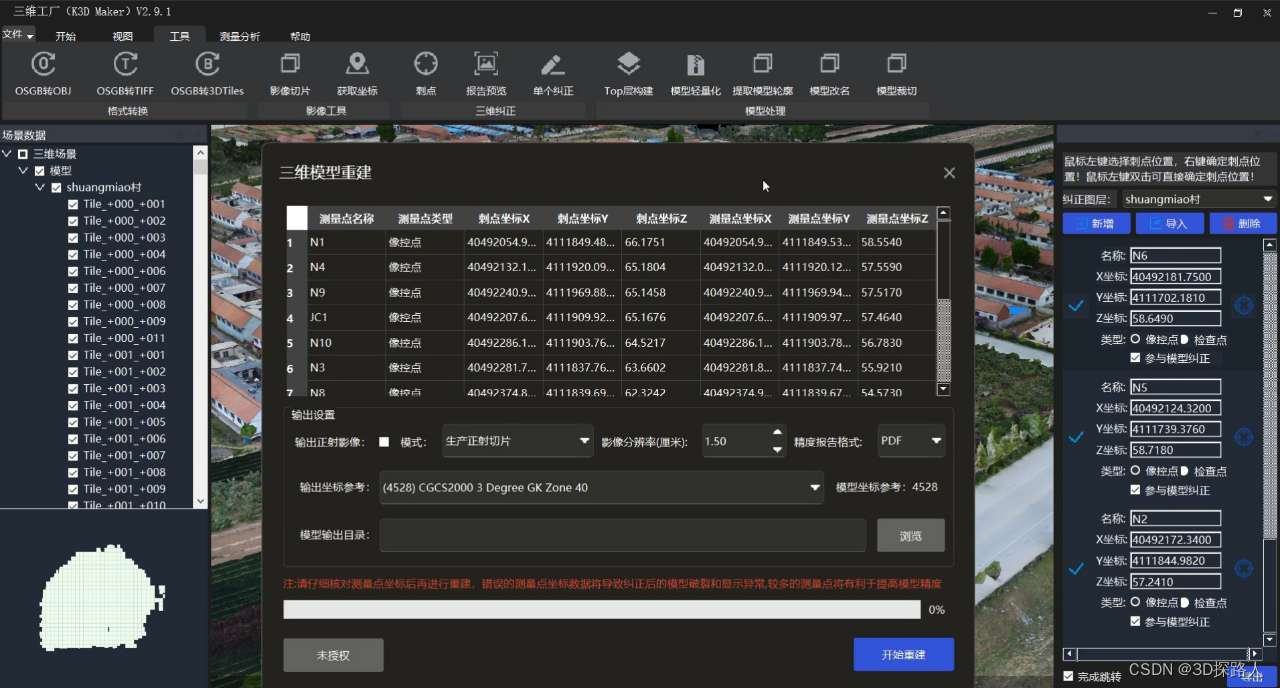
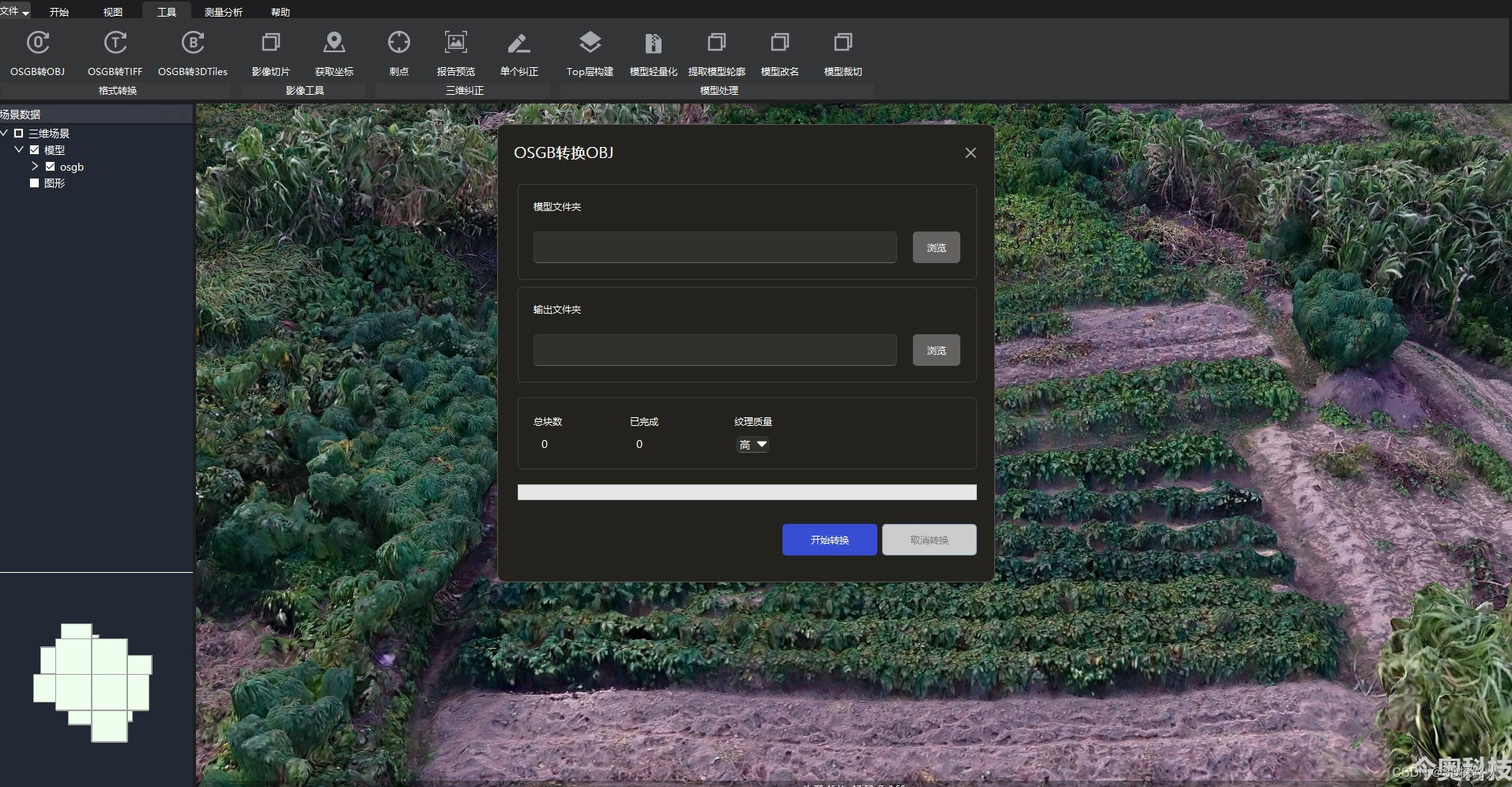
三维工厂软件简介
三维工厂K3DMaker是一款三维模型浏览、分析、轻量化、顶层合并构建、几何校正、格式转换、调色裁切等功能专业处理软件。可以进行三维模型的网格简化、纹理压缩、层级优化等操作,从而实现三维模型轻量化。轻量化压缩比大,模型轻量化效率高,自动化处理能力高;采用多种算法对三维模型进行几何精纠正处理,精度高,处理速度快,超大模型支持;优秀数据处理和转换工具,支持将OSGB格式三维模型转换为3DTiles等格式,可快速进行转换,快来体验一下吧,下载地址详见插图。