1. 下载ORB_SLAM3
在此之前应按上面的步骤完成了依赖项和库的安装:参见《ubuntu 20.04+ORB_SLAM3 安装并行全记录(无坑版)(一)》。
从github上下载源代码:
https://github.com/UZ-SLAMLab/ORB_SLAM3
下载后解压到主目录,重命名为ORB_SLAM3
2. 单独编译DBow2和g2o
先确认安装DBow依赖项:
sudo apt-get install libcanberra-gtk-module
sudo apt-get install libssl-dev
在对应的文件夹(home/ORBSLAM3/ThirdPart/DBow2,…)下执行:
mkdir build
cd build
cmake ..
make -j4
3. realsense2(选装)
- 注册public key
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
- 添加apt源
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
- 安装
sudo apt install librealsense2-dkms librealsense2-utils librealsense2-dev
4. 安装编译
打开终端,输入以下指令:
cd ORB_SLAM3
sudo chmod +x build.sh
sudo ./build.sh
此时ORB_SLAM3就开始编译了,不出意外的话,应该一步到位了!
5. 运行ORB-SLAM3
5.1 下载数据集
数据集下载地址:
https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
下载完成后,提取到如下的文件夹:
-
step1:在ORB_SLAM3里面新建一个文件夹:dataset
-
step2:将数据集复制到dataset下,并将其重命名为:MH_01_easy
-
step3:运行ORB_SLAM3

5.2 运行单目
在ORB_SLAM3文件夹下,打开终端,输入以下指令:
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml ./dataset/MH_01_easy ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt
注:此时大家会发现,运行ORB_SLAM3的时候,没有画面!,不要慌,是因为可视化界面没有打开
4. step4:打开可视化界面
打开mono_euroc.cc的第83行,将“false”改为“true”
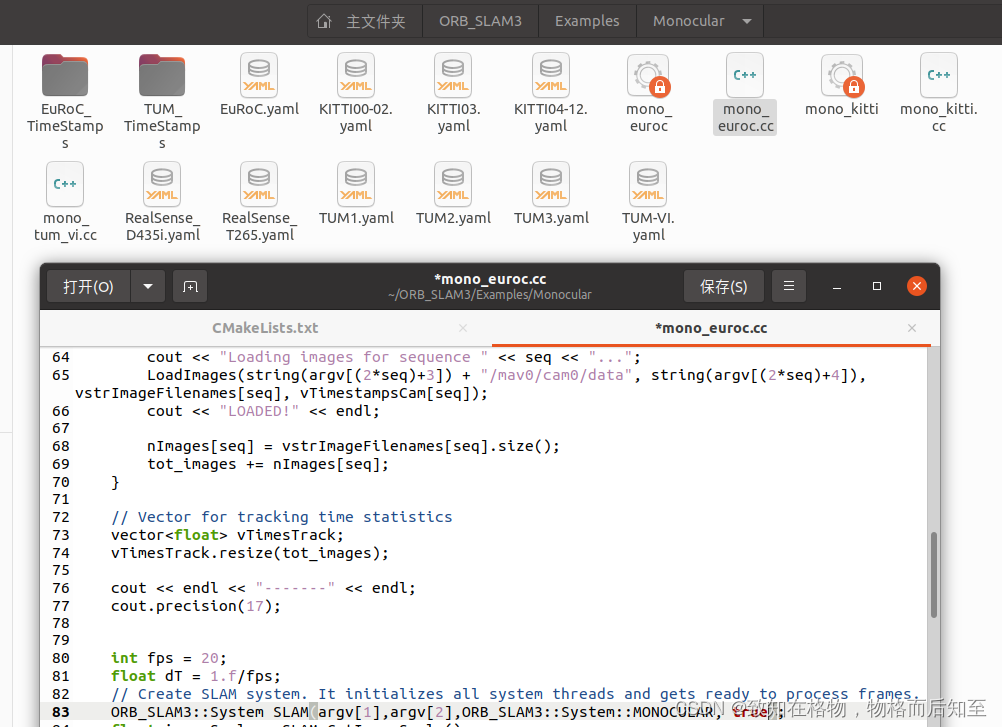
改完之后保存,重新编译ORB_SLAM3,打开终端输入:
cd ORB_SLAM3
sudo chmod +x build.sh
sudo ./build.sh
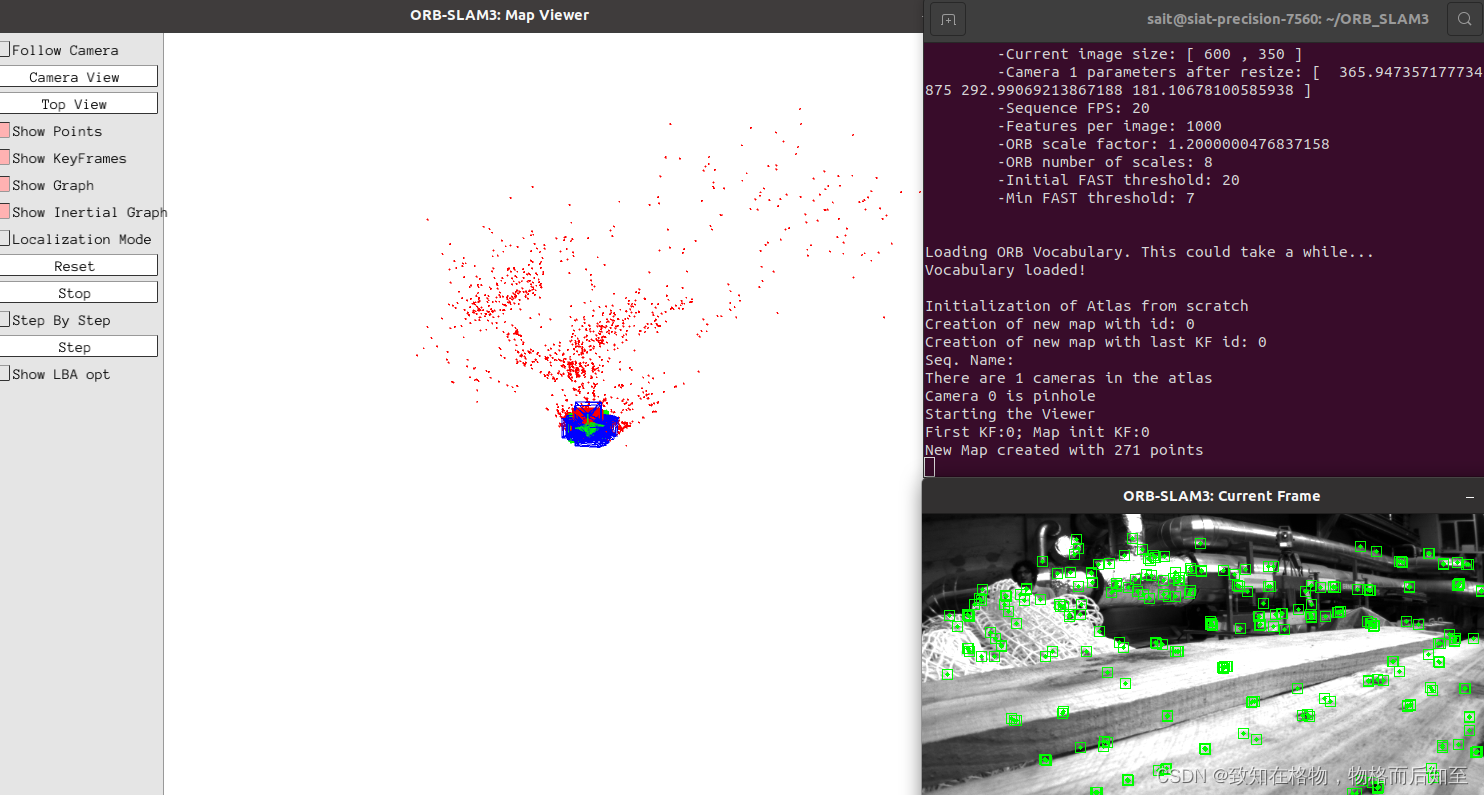
编译成功后,运行,打开终端输入:
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml ./dataset/MH_01_easy ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt
运行结果如图: