一、眼在手外
1.定位

定位过程可以想想成我们先示教一个标准的位置,但是物料过来的位置是随机的,怎么才能是机械手都吸取物料的固定点位姿。
如上图中,示教过程中A为特征点的机械手坐标,B为吸嘴吸料时机械手的坐标。(在计算之前已经将所有的坐标转为机械手坐标),C为旋转中心对应机械手坐标,在实际上料时,A‘特征点得到旋转角度,可以计算出A’点对应的机械手坐标,此时有两种方法计算出对应B‘点的机械手坐标。
第一种:A'对应的旋转中心,绕A'点旋转对应角度,得到目标旋转中心的位置,按照两个旋转中心的仿射变换就可以将机械手的位置从B移动至B’。
第二种:将A的坐标绕机械手旋转得到对应的机械手坐标M,M->A‘ 的转换矩阵传入B点坐标,即可求出对应B'的坐标。
2.摆动过程
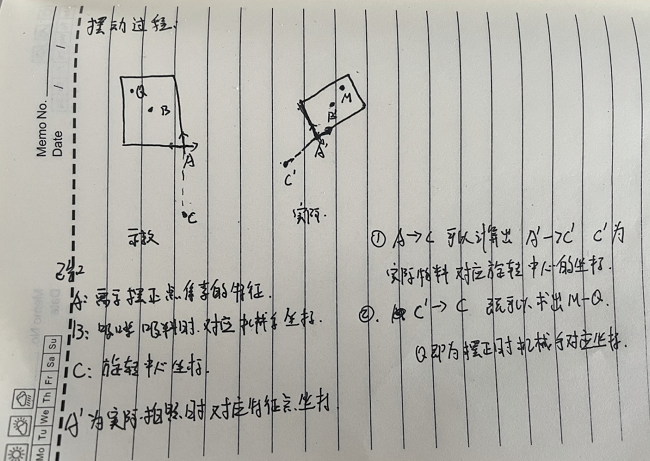
摆动过程可以简单理解为上料过程中,机械手吸取物料的位置变化,例如标准位置应当吸取B点,但是实际吸取了物料的Q点,在吸取了物料后,如何每次摆正将物料准确的摆入治具中。
示教过程是物料先放入治具中记录用吸嘴去吸取物料的机械手坐标,此坐标可以记作J,将机械手吸取物料移动至相机视野下,该位置为标准位置,记录此时机械手的坐标B,同时记录此时特征点的坐标A。标准位置的作用是相机视野中的物料通过转换变化后都能移动至标准位置,再通过J->M仿射变换,即可准确放入固定的治具中。
实际上料过程中,机械手吸取物料的位置是变化的,理论上应当吸取B‘点,但实际有位置偏差吸取的是M点,以A’为旋转中心,求出对应的实际旋转旋转中心C',C‘->C,将M点映射即可求出在标准位置时候机械手坐标Q。
二、眼在手上

眼在手上,机械手和相机会共同运动,在标定的时候,记录机械手工作点B的机械手坐标,A点为机械手对应的特征点坐标,A->B,M为实际上料过程中机械手的坐标,将M映射即可求出B’机械手工作的坐标。

写的比较抽象,大家需要在实际应用中使用。