缘起:最近一直在学习orb-slam3,在ros跑orb-slam3 rgbd需要彩色图像和深度图像话题,选用的奥比中光的astra pro 深度相机,在noetic能发布彩色和深度话题,但是它所发布的彩色和深度话题默认互为镜像,加载到orb-slam3图像飘的很厉害,我觉得和这2个话题互为镜像有关。
source ~/ros1_ws/devel/setup.bash
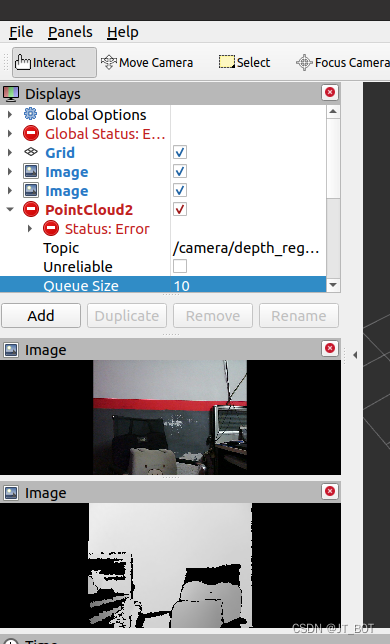
roslaunch astra_camera astra_pro.launch 启动相机
图像一左一右看下图。
打开终端
rosservice call /camera/set_depth_mirror "{data: true}" //可以为深度图设置镜像
rosservice call /camera/set_uvc_mirror "{data: true}" //可以为彩色图设置镜像

结论很简单,为了找这个结论用了一个多星期,opencv cv_bridge都学了一遍铁鞋踏破。