1、基础知识
1.1、IIC串行总线的组成及工作原理
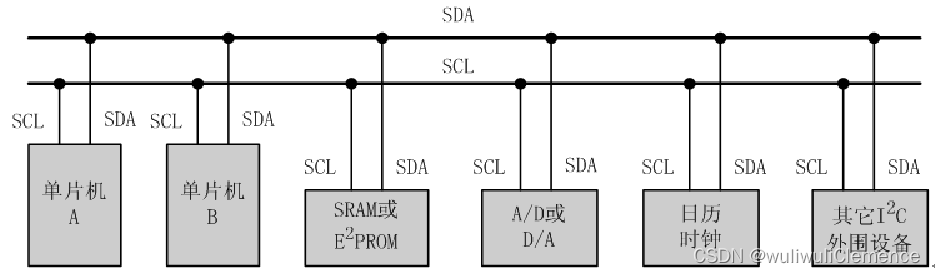
I2C总线只有两根双向信号线。一根是数据线SDA,另一根是时钟线SCL。
1.2、I2C总线的数据传输
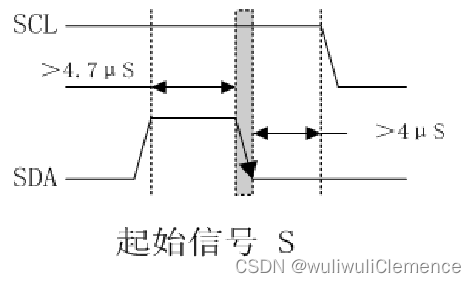
I2C总线进行数据传送时,时钟信号为高电平期间,数据线上的数据必须保持稳定,只有在时钟线上的信号为低电平期间,数据线上的高电平或低电平状态才允许变化。 SCL线为高电平期间,SDA线由高电平向低电平的变化表示起始信号;SCL线为高电平期间,SDA线由低电平向高电平的变化表示终止信号。
1.3、模拟子程序
1.3.1、起始信号
实际上是严格按照时序进行编写的
Void I2CStart(void)
{
SDA = 1;//数据线为高电平
SomeNop( );//保持一段时间
SCL = 1;//时钟线为高电平
SomeNop( );//保持一段时间
SDA = 0;//数据线为低电平
SomeNop( );//保持一段时间
}
1.3.2、终止信号
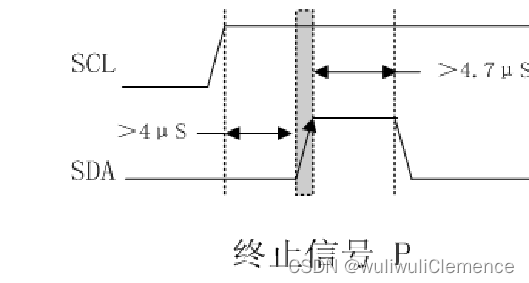
同上面原理一样
void I2cStop(void)
{
SDA = 0;
SomeNop( );
SCL = 1;
SomeNop( );
SDA = 1;
SomeNop( );
}
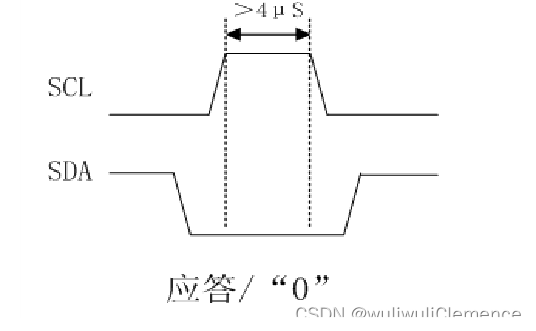
1.3.3应答I2C总线
void I2cACK(void)
{
SDA = 0;
SomeNop( );
SCL = 1;
SomeNop( );
SCL = 0;
SomeNop( );
}
1.3.4非应答I2C总线
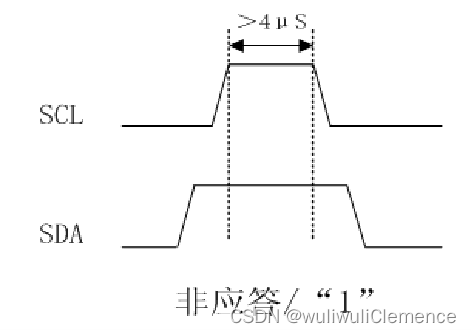
void I2cNOACK(void)
{
SDA = 1;
SomeNop( );
SCL = 1;
SomeNop( );
SCL = 0;
SomeNop( );
}
2.程序
2.0、宏定义、头文件
#include<reg52.h>
#include<intrins.h> //_nop_
#define uchar unsigned char
#define uint unsigned int
sbit SCL=P2^1;
sbit SDA=P2^0;
sbit RS=P1^0;
sbit RW=P1^1;
sbit E=P2^5;
sbit duan=P2^6;
sbit wei =P2^7;
sbit RST=P2^4;
#define RS_data RS=1
#define RS_command RS=0
#define RW_read RW=1
#define RW_write RW=0
#define E_close E=0
#define E_open E=1
#define Data P0
char string[]={
"wuliwuli:"} ;
char string1[]={
"clemmence:"};
uchar arr[8];
uchar arr1[8];
uchar dat[]={
12,13,14,15};
2.1、延时部分
void delay(uint k)
{
uint i,j;
for(i=0;i<k;i++)
{
for(j=0;j<113;j++)
{
;
}
}
}
关于延时部分的详细程序解释见
链接: 单片机控制一盏灯的亮与灭程序解释
2.2、IIC协议的起始与终止,24c02的应答与非应答
这一部分的详细解释见本篇文章第一节。主要是根据时隙写的。
//基本模块设置
//开始状态
void start()
{
SDA=1;
_nop_();
SCL=1;
_nop_();
SDA=0;
_nop_();
SCL=0;
_nop_();
}
//结束状态
void end()
{
SDA=0;
_nop_();
SCL=1;
_nop_();
SDA=1;
_nop_();
}
//应答
void ack()
{
SDA=0;
_nop_();
SCL=1;
_nop_();
SCL=0;
_nop_();
}
//非应答
void noack()
{
SDA=1;
_nop_();
SCL=1;
_nop_();
SCL=0;
_nop_();
}
2.3、发送字节给2402
这个地方比较难理解,下面进行仔细讲解。
先逐行看程序
void sendbyte2402 (uchar dat )
定义含有返回值的函数,以及要发送的数据,为什么要有返回值呢。这是因为这段程序可能会发生错误,比如无法与设备通信或者写入数据出错等。通过设置返回值可以让调用者知道这段程序执行的结果,从而采取相应的措施或者纠正错误。
具体来说,在这段程序中,写入或读取数据时需要向设备发送一些命令,并检查设备是否回应了正确的应答信号,如果设备没有回应或者应答信号有误,程序就会出错。如果不设置返回值,调用者无法得知这段程序是否执行成功,也无法根据执行结果进行后续处理。因此,设置返回值可以提高程序的健壮性(鲁棒性)和可靠性。
uchar i;
for(i=0;i<8;i++) //一字节等于8为二进制
{
}
进行循环传输字节,一字节是8为二进制
SCL=0;
_nop_();
在前面的基础知识中讲过,当时钟线为1时,是进行保持的,不能改变状态,所以为了能够写入数据,这里将时钟置为0。延时的目的是,确定时钟线已经被拉高,可以正确写入数据。
SDA=dat>>7;
_nop_();
dat 里面的8位2进制向右移动7位,赋值给SDA,那么SDA里面存的就是高位了。
延时的目的是以确保数据已经稳定传输。
SCL=1;
拉高时钟线,确保状态不再变化,数据存起来了。
dat=dat<<1;
dat进行左移,次高位变成了最高位,继续进行传输。
SCL=0;
关于为什么加 scl=0;:在这段代码中,每次发送完一位数据后,需要将时钟线 scl 置为0,以便下次发送数据。由于后续还需要使用 scl,因此需要在每次使用 scl 前将其置为0,以避免上次时钟信号的干扰。循环结束后,需要再次将 scl 置为0,以避免在后续操作中发生意外的时钟信号。
向24C02发送字节的完整程序为
void sendbyte2402 (uchar dat )
{
uchar i;
for(i=0;i<8;i++) //一字节等于8为二进制
{
SCL=0;
_nop_();
SDA=dat>>7;
_nop_();
SCL=1;
dat=dat<<1;
}
SCL=0;//时钟重置
}
2.4、从24C02里面读取字节
有了发送数据知识的积累,现在我们来看从2402上读字节
uchar readbyte2402() //主体一个字节
{
uchar i,dat=0;
SDA=1;
for (i=0;i<8;i++)
{
SCL=1; // 数据稳定,方便读取
_nop_();
dat<<=1; // 左移移位并赋值给dat
_nop_();
dat=dat|SDA;
_nop_();
SCL=0;
_nop_();
}
return bat;
}
详细解释
uchar readbyte2402(): 定义了一个名为readbyte2402的函数,它没有输入参数,返回类型为uchar,即一个字节的无符号整数。
uchar i,dat=0;: 定义了两个变量i和dat,i用于计数,dat用于存储读取的数据,初始值为0。
SDA=1;: 将SDA引脚设置为高电平,即输入模式,准备读取数据。
if(i=0;i<8;i++): 循环8次,依次读取8个位。
SCL=1;: 将SCL引脚设置为高电平,读取数据前先将时钟线拉高,确保数据稳定。
nop();: 空指令,延时一段时间。
dat<<=1;: 左移移位,将已经读取到的数据向左移一位,为下一个数据位腾出位置。
nop();: 空指令,延时一段时间。
dat=dat|SDA;: 将当前读取到的SDA数据位与dat变量进行或运算,将结果存储在dat中。
nop();: 空指令,延时一段时间。
SCL=0;: 将SCL引脚拉低,数据线上的数据位已经读取完毕,准备读取下一个数据位。
nop();: 空指令,延时一段时间。
return dat;: 返回已经读取到的8位数据,即一个字节的数据。
2.5、将数据写入到24C02
参数解释
uchar *ptr,uchar addr,uchar n
uchar *ptr:指向一个uchar类型的指针,该指针指向一块内存区域,用于存储要写入24C02的数据。
uchar addr:表示24C02内存的地址,指示从哪个地址开始写入数据。
uchar n:表示要写入的数据长度,即写入多少个字节的数据。
sendbyte2402(0xa0);
这行代码是向 24C02 发送一个写命令,并指定设备地址为 0xa0。在 I2C 协议中,设备地址的最高位是固定为 0 的,其余七位由硬件接线或软件设置。在这个代码中,设备地址为 0xa0,也就是二进制的 1010000,其中最高位为 0。这个地址是由厂商定义的,用来识别 24C02 存储器芯片。发送完这个命令后,接下来的操作就是向 24C02 写入数据。
之后就是根据数据长度进行循环,给地址和指针发送数据,并且产生应答,每经过一次循环,地址和指针自加1。
将数据写入到24C02的完整代码为
//将数据写入到24C02
void write2402(uchar *ptr,uchar add, uchar n) //指针,地址,写入长度
{
uchar i;
start();
_nop_();
sendbyte2402(0xa0);
_nop_();
ack();
_nop_(); //给2402发送写的命令 ,并应答
for(i=0;i<n;i++)
{
_nop_();
sendbyte2402(add);
_nop_();
ack();
_nop_();
sendbyte2402( *ptr);
_nop_();
ack();
_nop_();
add++;
ptr++;
}
end();
delay(10);
}
这里面调用了许多空字节进行延时。那么自己定义的子程序delay和nop的区别在于:
delay指令是用于延时的,它可以在程序中让CPU暂停执行一段时间,等待一段时间后再继续执行后续的指令。延时的时间长度可以通过给delay指令传递参数来指定,一般以毫秒或微秒为单位。delay指令会消耗CPU资源,因此需要慎重使用,避免过度延时导致程序响应变慢或卡死。
nop指令是空操作指令,它的作用是让CPU执行一条空指令,不进行任何操作,只是等待一个时钟周期后继续执行下一条指令。nop指令通常用于占位或者空转,以便程序的执行时间满足特定的要求。相比delay指令,nop指令的执行速度更快,不会消耗过多的CPU资源,但是无法精确控制时间长度。
2.6、使用I2C协议从24C02芯片中读取n个字节的数据
sendbyte2402(add); //告诉地址
noack(); //不应答就开始读数据
不应答就开始读取数据的意思是。应答表示24C02正在接受数据,如果接收器返回非应答信号,就说明接收器不准备接收数据,可以开始读取数据了。
sendbyte2402(0xa1);
告诉芯片要读取命令
SCL=0;
在这个代码中,将时钟置0是为了防止在读完数据后,芯片还继续发送一些不必要的I2C命令。这个时候将时钟线拉低,芯片就无法再继续发送命令了,从而确保传输的安全性。
时钟线在正常的I2C通信过程中会有起伏和变化,但是在数据读取结束后,需要确保时钟线处于空闲状态(即没有起伏和变化),才能避免意外产生I2C命令。将时钟线拉低,就是让时钟线始终保持低电平,确保空闲状态。
I2C从24C02里面读数据的完整代码是
//使用I2C协议从24C02芯片中读取n个字节的数据
void read2402(uchar *ptr,uchar add, uchar n)
{
start();
_nop_();
sendbyte2402(0xa0);
_nop_();
ack();
_nop_();
while(n) //循环n次,每次读取一个字节
{
sendbyte2402(add); //告诉地址
noack(); //不应答就开始读数据
_nop_();
start();
sendbyte2402(0xa1); //告诉24C02,读命令 告诉芯片要读取数据
ack();
*ptr=readbyte2402();
ack();
ptr++;
add++;
n--;//循环计数器
}
SCL=0;
stop();
}
上面比较细节的地方,在这一节里面已经详细说过,下面介绍该段代码的整体逻辑。这段代码实现的功能是读取数据。
在读取数据前需要向24C02发送一个写命令,告诉它要从哪个地址读取数据。所以在读命令的地方需要先执行写命令,然后再发送读命令,这样24C02才能正确地读取数据并发送给主控芯片。
接下来进入循环,读取数据
首先是告诉地址,没有应答,表明这一会没有数据写入,所以是可以读取数据的。告诉24C02,要读取数据,产生应答,代表可以读数据。指针、地址自加1,循环次数自减1,完成一次读取。
2.7、数码管锁存
void cmg()
{
duan=1;
P0=0x00;
duan=0;
wei=1;
P0=0x00;
wei=0;
RST=0; //关时钟DS1302
}
这一块解释见博文
链接: 单片机——数码管动态显示
2.8、LCD1602的写命令、读命令操作以及设置工作方式模块(初始化)
//LCD1602写命令
void writecom(uchar command)
{
delay(10);
RS_command;
RW_write;
E_open;
Data=command;
_nop_();
E_close;
}
//LCD1602写数据
void writedata(uchar da)
{
delay(10);
RS_data;
RW_write;
E_open;
Data=da;
_nop_();
E_close;
}
//LCD初始化
void Init()
{
cmg();
delay(15);
writecom(0x38);//数据总线8位,显示两行。5×7
writecom(0x38);
writecom(0x38);
writecom(0x0e); //显示功能开,有光标,光标闪烁
writecom(0x06); // 光标右移,显示屏不移动
writecom(0x01); //清屏
}
}
详细解释见博客
链接: 单片机——LCD1602
2.9、对数据进行处理
在程序的最开始我们定义了要显示的字符和要存储的数据。
char string[]={
"wuliwuli:"} ;
char string1[]={
"clemmence:"};
uchar arr[8];
uchar arr1[8];
uchar dat[]={
12,13,14,15};
对bat数组里的四个元素进行处理,并放在arr中
void culi()
{
arr[0]='0'+dat[0]/10;
arr[1]='0'+dat[0]%10;
arr[2]='0'+dat[1]/10;
arr[3]='0'+dat[1]%10;
arr[4]='0'+dat[2]/10;
arr[5]='0'+dat[2]%10;
arr[6]='0'+dat[3]/10;
arr[7]='0'+dat[3]%10;
}
}
函数culi()是将bat数组中四个元素(即bat[0]、bat[1]、bat[2]和bat[3])转换成对应的两位数字,保存在arr数组中。每个元素先除以10,得到十位上的数字,然后对10取余数,得到个位上的数字。这样就将四个数值分别处理成了两位数字,便于在1602液晶屏上显示。
arr[0]=‘0’+bat[0]/10;
在这个代码中, ‘0’ 是一个 ASCII 码值,表示字符 “0”。‘0’ + arr1[0]/10 将 arr1[0] 的值除以 10,得到十位上的数字,然后将其转换为字符 “0” 到 “9” 中的一个。由于字符在计算机中以 ASCII 码的形式表示,“0” 的 ASCII 码值是 48,所以可以用 ‘0’ 加上任何数字来获得相应的 ASCII 码字符。
void culi1()
{
arr[0]='0'+arr1[0]/10;
arr[1]='0'+arr1[0]%10;
arr[2]='0'+arr1[1]/10;
arr[3]='0'+arr1[1]%10;
arr[4]='0'+arr1[2]/10;
arr[5]='0'+arr1[2]%10;
arr[6]='0'+arr1[3]/10;
arr[7]='0'+arr1[3]%10;
}
arr1目前是一个空数组,待会会从24c02里面读数据,进行存储,所以同时也要将arr1处理并放置在arr数组中。
2.10、规定数据显示的位置显示的内容
2.10.1、规定显示的位置
lcdpos(uchar line ,p)
{
uchar pos;
if(line==0)
pos=0x80;//写在第一行
if(line==1)
pos=0xc0;//写在第二行
pos=p+pos;
writecom(pos);
}
这段代码是用于将数据显示在16x2字符LCD上的。首先,定义一个长度为4的数组dat,存储要显示的数据。接下来是两个函数,lcd_pos函数用于设置显示位置,其中参数line表示行数,p表示列数。因为1602显示器有两行,每行可以显示16个字符,所以第一行地址从0x80开始,第二行地址从0xc0开始,列数是在此基础上加上一个偏移量。例如,line=0,p=5时,pos的值为0x85,表示第一行第6个字符位置。
2.10.2、显示数据
lcddat(uchar n,uchar *ptr)
{
uchar i;
for(i=0;i<n;i++)
{
writedata (*(ptr+i));
}
}
n是数据长度。
*(ptr+i)是指针操作,表示取出指针ptr指向的内存中的值,加上偏移量i。这里的偏移量i实际上是循环变量,用来控制遍历的数据位置。
在函数lcddat中,ptr指向的是一个数组,通过遍历数组元素,将每个元素的值写入1602显示器中。使用指针的好处在于,可以避免数组在函数参数传递时的复制,节省内存空间。同时,通过传递指针,可以在函数内部修改调用者传递进来的数据。
2.11、主函数
void main()
{
uchar i;
Init(); //初始化,准备进行显示
delay(100);
i=0;
lcdpos(0,0) ;//0行0列开始
lcddat(9,string+i); //wuliwuli:,是九个字符,显示dis里面的值
i=0;
lcdpos(1,0) ;//1行0列开始
lcddat(9,string1+i);
//写数据到24C02,给数据让1602显示,从2402里面读数据,再给1602显示
while(1)
{
i=0;
write2402(dat+i,0,4);
culi();
i=0;
lcdpos(0,10);
lcddat(8,arr+i);
i=0;
read2402(arr1+i,0,4);
i=0;
culi1();
lcdpos(1,10);
lcddat(8,arr+i);
}
}
主函数的主要功能是这段代码的主要作用是将数据写入24C02存储器,读取该存储器中的数据并将其显示在LCD1602液晶屏上。主要是对前面函数的调用。大体步骤:
初始化并准备显示。这里定义了一个uchar类型的变量i,然后调用了初始化函数Init()和延时函数delay(),以准备显示。
在LCD1602上显示字符串。这里设置了光标的初始位置,然后在LCD1602上显示了两个字符串。第一个字符串是从变量dis中取出来的,并在第0行第0列开始显示,显示长度为9个字符。第二个字符串是从变量dis1中取出来的,并在第1行第0列开始显示,显示长度为9个字符。
将数据写入24C02存储器。这里使用了一个无限循环,不断地将数据写入24C02存储器。使用函数write2402(),将变量dat中的数据写入存储器的地址0,写入4个字节。
读取24C02存储器中的数据,并在LCD1602上显示。这里调用了culi()和culi1()函数,用于控制延时时间。然后使用函数read2402()从24C02存储器中读取数据,将其存储在变量arr1中,从地址0开始读取4个字节。最后,在LCD1602上显示变量arr中的8个字符。
3.完整代码
#include<reg52.h>
#include<intrins.h> //_nop_
#define uchar unsigned char
#define uint unsigned int
sbit SCL=P2^1;
sbit SDA=P2^0;
sbit RS=P1^0;
sbit RW=P1^1;
sbit E=P2^5;
sbit duan=P2^6;
sbit wei =P2^7;
sbit RST=P2^4;
#define RS_data RS=1
#define RS_command RS=0
#define RW_read RW=1
#define RW_write RW=0
#define E_close E=0
#define E_open E=1
#define Data P0
char string[]={
"wuliwuli:"} ;
char string1[]={
"clemence:"};
uchar arr[8];
uchar arr1[8];
uchar dat[]={
12,13,14,15};
// 延时部分
void delay(uint k)
{
uint i,j;
for(i=0;i<k;i++)
{
for(j=0;j<113;j++)
{
;
}
}
}
//基本模块设置
//开始状态
void start()
{
SDA=1;
_nop_();
SCL=1;
_nop_();
SDA=0;
_nop_();
SCL=0;
_nop_();
}
//结束状态
void end()
{
SDA=0;
_nop_();
SCL=1;
_nop_();
SDA=1;
_nop_();
}
//应答
void ack()
{
SDA=0;
_nop_();
SCL=1;
_nop_();
SCL=0;
_nop_();
}
//非应答
void noack()
{
SDA=1;
_nop_();
SCL=1;
_nop_();
SCL=0;
_nop_();
}
//发送字节给2402
void sendbyte2402 (uchar dat )
{
uchar i;
for(i=0;i<8;i++) //一字节等于8为二进制
{
SCL=0;
_nop_();
SDA=dat>>7;
_nop_();
SCL=1;
dat=dat<<1;
}
SCL=0;//时钟重置
}
//从2402里面读取字节
uchar readbyte2402() //主体一个字节
{
uchar i;
uchar dat=0;
SDA=1;
for (i=0;i<8;i++)
{
SCL=1; // 数据稳定,方便读取
_nop_();
dat<<=1; // 左移移位并赋值给dat
_nop_();
dat=dat|SDA;
_nop_();
SCL=0;
_nop_();
}
return dat;
}
//将数据写入到24C02
void write2402(uchar *ptr,uchar add, uchar n) //指针,地址,写入长度
{
uchar i;
start();
_nop_();
sendbyte2402(0xa0);
_nop_();
ack();
_nop_(); //给2402发送写的命令 ,并应答
for(i=0;i<n;i++)
{
_nop_();
sendbyte2402(add);
_nop_();
ack();
_nop_();
sendbyte2402( *ptr);
_nop_();
ack();
_nop_();
add++;
ptr++;
}
end();
delay(10);
}
//使用I2C协议从24C02芯片中读取n个字节的数据
void read2402(uchar *ptr,uchar add, uchar n)
{
start();
_nop_();
sendbyte2402(0xa0);
_nop_();
ack();
_nop_();
while(n) //循环n次,每次读取一个字节
{
sendbyte2402(add); //告诉地址
noack(); //不应答就开始读数据
_nop_();
start();
sendbyte2402(0xa1); //告诉24C02,读命令 告诉芯片要读取数据
ack();
*ptr=readbyte2402();
ack();
ptr++;
add++;
n--;//循环计数器
}
SCL=0;
end();
}
//数码管锁存
void cmg()
{
duan=1;
P0=0x00;
duan=0;
wei=1;
P0=0x00;
wei=0;
RST=0; //关时钟DS1302
}
//LCD1602写命令
void writecom(uchar command)
{
delay(10);
RS_command;
RW_write;
E_open;
Data=command;
_nop_();
E_close;
}
//LCD1602写数据
void writedata(uchar da)
{
delay(10);
RS_data;
RW_write;
E_open;
Data=da;
_nop_();
E_close;
}
//LCD初始化
void Init()
{
cmg();
delay(15);
writecom(0x38);//数据总线8位,显示两行。5×7
writecom(0x38);
writecom(0x38);
writecom(0x0e); //显示功能开,有光标,光标闪烁
writecom(0x06); // 光标右移,显示屏不移动
writecom(0x01); //清屏
}
//对dat和arr1里面的数据进行处理
void culi()
{
arr[0]='0'+dat[0]/10;
arr[1]='0'+dat[0]%10;
arr[2]='0'+dat[1]/10;
arr[3]='0'+dat[1]%10;
arr[4]='0'+dat[2]/10;
arr[5]='0'+dat[2]%10;
arr[6]='0'+dat[3]/10;
arr[7]='0'+dat[3]%10;
}
void culi1()
{
arr[0]='0'+arr1[0]/10;
arr[1]='0'+arr1[0]%10;
arr[2]='0'+arr1[1]/10;
arr[3]='0'+arr1[1]%10;
arr[4]='0'+arr1[2]/10;
arr[5]='0'+arr1[2]%10;
arr[6]='0'+arr1[3]/10;
arr[7]='0'+arr1[3]%10;
}
//显示位置
lcdpos(uchar line ,p)
{
uchar pos;
if(line==0)
pos=0x80;//写在第一行
if(line==1)
pos=0xc0;//写在第二行
pos=p+pos;
writecom(pos);
}
//显示数据
lcddat(uchar n,uchar *ptr)
{
uchar i;
for(i=0;i<n;i++)
{
writedata (*(ptr+i));
}
}
void main()
{
uchar i;
Init(); //初始化,准备进行显示
delay(100);
i=0;
lcdpos(0,0) ;//0行0列开始
lcddat(9,string+i); //wuliwuli:,是九个字符,显示dis里面的值
i=0;
lcdpos(1,0) ;//1行0列开始
lcddat(10,string1+i);
//写数据到24C02,给数据让1602显示,从2402里面读数据,再给1602显示
while(1)
{
i=0;
write2402(dat+i,0,4);
culi();
i=0;
lcdpos(0,10);
lcddat(8,arr+i);
i=0;
read2402(arr1+i,0,4);
i=0;
culi1();
lcdpos(1,10);
lcddat(8,arr+i);
}
}
4.运行结果
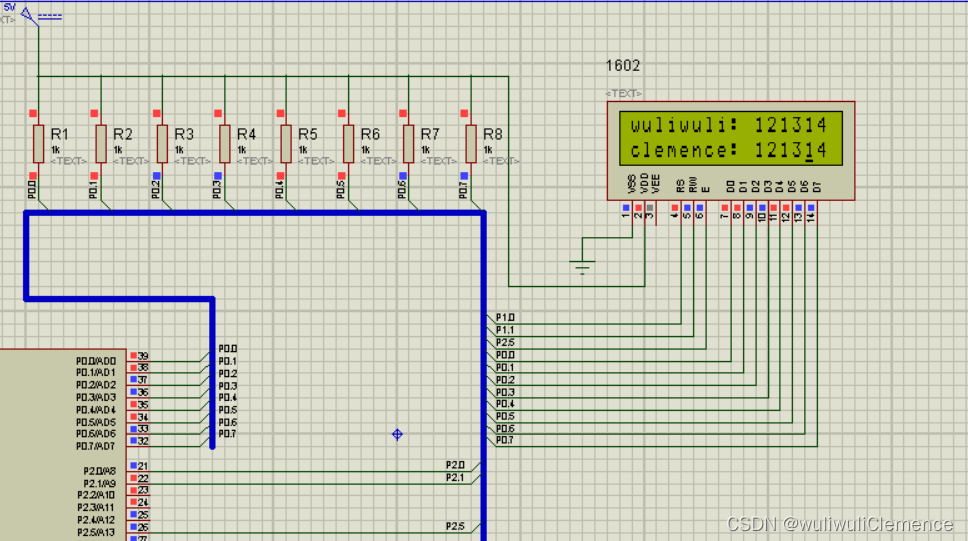
ps:这里解释一下,忘记它是1602了,15没地方显示了。由于程序和文章都是边做边写的,所以说修改的话,上面的子程序也要跟着修改,所以就不想修改了。然后子程序,就是第二板块内容是边做边写的,所以说子程序是在没有运行的情况下写的,部分地方可能存在问题,在运行完之后也对子程序进行了修改,但是难免还是有一些错误。但是完整的程序,就是第三部分一定是对的,在连线和我端口定义一样的情况下,一定是可以做出来的。(我自己做不出来就放在草稿箱里,改天继续看)
本次的24C02的部分有些难度,它是1602,IIC协议和24C02的综合。较之于之前新添加的部分就是IIC协议的使用和向24C02发数据,24C02写数据,读24C02里面的数据等。
好啦,24C02的部分就到这里啦。如有疑问,评论区留言,如能帮助到您,点个关注呗。