目 录
第1章 绪论 1
第2章 移动机器人路径规划方法的分类及现状 5
2.1 基于事例的学习规划方法 5
2.2 基于环境模型的规划方法 6
2.3 基于行为的结构 7
第3章 机器鼠的设计任务及方案分析 10
3.1 微型机器鼠竞赛介绍 10
3.2 设计任务分解 11
3.3 机器鼠任务分析及基于行为设计 12
3.3.1 巡视通道,沿墙行走行为 13
3.3.2 判断通道,触发旋转行为 19
3.3 机械平台 21
3.4.1 机器鼠移动机构方案选择 21
3.4.2 车轮的安装与选择 26
3.4.3 车轮的选择 27
3.5 多传感器的配合使用 28
3.5.1 传感器在机器人学科应用 28
3.5.2 机器鼠红外传感器 30
3.5.3机器鼠传感器设计方案 34
第4章 机器鼠四相步进电机及驱动电路设计 38
4.1 步进电机控制概况 38
4.2 反应式步进电动机的结构及工作原理 39
4.3 步进电机功率的确定 43
4.4 驱动电源 45
4.4.1 步进电动机的控制 47
4.4.2 机器鼠所使用的步进电机驱动电路 49
4.5 单片机控制 53
4.6 单片机控制程序流程图 64
第5章 基于机器鼠控制系统的一种实用自主吸尘机器人机械设计 69
5.1差动式车体运动学分析 70
5.2 驱动轮机构组成 74
5.3 随动轮机构组成 79
结 论 81
致 谢 83
参考文献 85
基于行为设计的自主式小型机器鼠系统研究
摘要
移动机器人是近年来发展起来的一门综合学科,集中了机械、电子、计算机、自动控制以及人工智能等多学科最新研究成果,代表了机电一体化的最高成就。移动机器人在工业生产中常用来完成运输和上下料等任务,同时也被广泛用于农业、医疗等不同行业。
在移动机器人相关技术研究中,路径规划技术是一个重要研究领域[17]。本文首先初步讨论总结了目前主要的路径规划技术。从基于事例、基于环境模型和基于行为三个方面全面而系统地综述了移动机器人路径规划技术的研究现状,对于目前普遍采用的路径规划方法及其实际应用情况进行了较为详细介绍和分析。
基于行为的方法是由MIT的Brooks在他著名的包容式结构[42]中建立,它是一门从生物系统得到启发,而产生的用来设计自主机器人的技术,也是本文所重点研究的目标。它采用类似动物进化的自底向上的原理体系,尝试从简单的智能体来建立一个复杂的系统。将其用于解决移动机器人路径规划问题是一种新的发展趋势,它把导航问题分解为许多相对独立的行为单元,比如跟踪、避碰、目标制导等。这些行为单元是一些由传感器和执行器组成的完整的运动控制单元,具有相应的导航功能,各行为单元所采用的行为方式各不相同,这些单元通过相互协调工作来完成导航任务。
基于行为的机器人学反对抽象的定义, 因此采用具体化的解释更适合该领域的哲学思想。基于行为的机器人学的重要研究内容是系统结构而不是算法, 基于行为设计的机器人在非结构化动态环境中的性能非常优越,用基于符号的机器人学设计的类似机器人无法达到如下性能:
a.高速度,高灵活性。在动态复杂环境中的移动速度很快;
b.高鲁棒性。 可以承受局部损坏;
c.高效性。 软件代码可以是传统的几百分之一,硬件可以是传统的几十分之一;
d.经济性。价格是传统的十几分之一;
e.可扩展性。很少改变原有系统便可增加性能;
f.可靠性。分布式自组织并行工作,可靠性强。
为进一步研究基于行为的规划方法,而引入一个真实环境及任务模型,即IEEE每年举办的微型机器鼠比赛,通过设计基于行为的机器鼠模型论证该算法的可行性。此项比赛要求机器人能够自主在未知环境中完成迷宫穿越的任务。针对机器鼠比赛项目的环境模型未知或不确定,以及该机器人本身的某些限制, 采用基于行为的研究方法, 实现了自行设计的自主式小型移动机器人在未知、动态环境中的自动避障。通过对机器鼠所运行的环境建模,根据基于行为的方法对机器鼠的执行任务、沿墙行走、判断障碍旋转进行分解构建,以及对机器鼠传感器布置及机械平台设计进行理论分析。
本文所研究的模型是自行搭建的机器鼠实物平台, 它由两步进电机驱动, 其外形如图1所示。在机器鼠正向和侧向共有3个漫反射式红外线光电传感器, 距离为10cm~20cm ,两个碰撞开关,传感器位置布置如图2所示,当传感器前方有障碍物时, 传感器的输出为1, 否则为0。

图1 机器鼠外形照片
采用了ATMEL公司的AT89S52单片机控制,小型四相步进电机及专用的PMM8713步进电机驱动方案,红外接近开关作为主要传感器,差动式底盘结构,初步实现针对微型机器鼠竞赛的机器鼠的设计。

图2 机器鼠传感器布置
行为的设计与机器人的能力密切相关,机器人的硬件限制了机器人的某些行为的能力,根据机器鼠的比赛任务,对机器鼠的行为中作如图3分解。
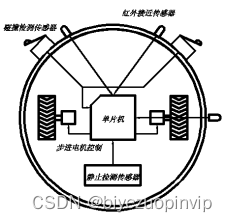
图3 机器鼠的基本行为组件
机器鼠的设计是对基于行为的规划方法的一种验证设计,这种算法正广泛应用于家庭服务类机器人,最典型的实例是自主吸尘机器人。在机器鼠传感和控制系统的基础上,本文进一步针对自主吸尘机器人提出一种机械底盘设计方案,使机器鼠的实用意义得以提升。
关键词:移动机器人;路径规划;单片机控制步进电机驱动;红外接近开关传感器;自主吸尘机器人
#include<reg52.h>
#define uint unsigned int
#define uchar unsigned char
uint time0,time1,i;
sbit p10=P1^0;
sbit p11=P1^1;
sbit p12=P1^2;
sbit p13=P1^3;
sbit int00=P3^2;
sbit int11=P3^3;
sbit p20=P2^0;
sbit p21=P2^1;
void delay(int x) //延时
{
uint i;
for(i=0;i<x;i++)
{
}
}
void turn90(void) //转90度
{
p13=!p13;
for(i=0;i<500;i++)
{
p10=!p10;
p12=!p12;
delay(300);
}
p13=!p13;
}
void exchang_1(void) interrupt 0 //沿墙传感器
{
uint i,w;
delay(10);
w=int00;
EA=0;
if(w==0)
{
i=time0;
time0=time1;
time1=i;
}
EA=1;
}
void front(void) interrupt 2 //前方传感器1,2
{
uint m,n;
m=p20;
n=p21;
EA=0;
delay(10);
while(m==0&&n==1)
{
n=p21;
m=p20;
p12=!p12;
delay(300);
}
while(m==1&&n==0)
{
n=p21;
m=p20;
p10=!p10;
delay(300);
}
if(m==0&&n==0)
{
n=p21;
m=p20;
turn90();
EA=1;
}
EA=1;
}




















