这里写目录标题
起因
因为在学习PID算法,程序里并不能很好的展示调参效果,于是使用VOFA+,伏特加上位机软件来调试PID,可以很好的展示各个数据的直观曲线形式,特别适合数据变化较大的数据进行直观显示。
我们在下位机(单片机里进行调节参数),在上位机里查看数据变化的曲线,根据曲线进行动态调节参数,从而达到我们的目的
本文以调节PID位置式,以PID速度环闭环调试参数为例,来给大家带来如何使用VOFA+软件,来达到我们PID速度环闭环
一、VOFA+支持的三种数据传输协议
Vofa支持3种数据流方式:分别为:RawData、firewater、justfloat。
RawData:RawData协议适用于不需要解析数据,仅仅查看字节流的需求。RawData不做采样数据解析。RawData不做采样数据解析。就相当于普通的串口助手。firewater:本协议是CSV风格的字符串流,直观简洁,编程像printf简单。但由于字符串解析消耗更多的运算资源(无论在上位机还是下位机),建议仅在通道数量不多、发送频率不高的时候使用。justfloat:本协议是小端浮点数组形式的字节流协议,纯十六进制浮点传输,节省带宽。此协议非常适合用在通道数量多、发送频率高的时候。
RawData协议格式
RawData:协议适用于不需要解析数据,仅仅查看字节流的需求。【可以直接当串口助手使用】
如果您只是想将本软件当成串口助手使用,选择RawData协议,可以保证接收到什么打印什么。
1、使用方法
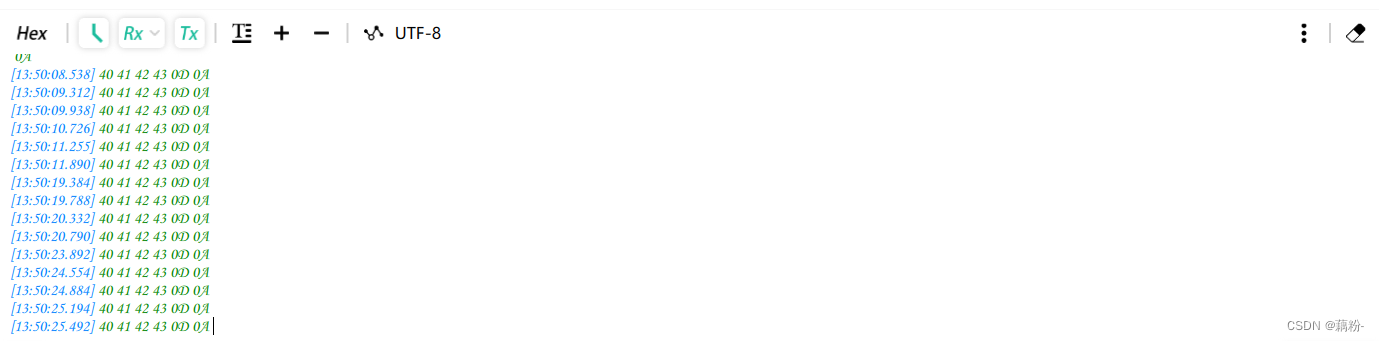
意思是发什么,显示什么,可以字符串显示,可以Hex显示
选择RawData数据引擎

2、示例
stm32下位机程序示例
void RawData_Test(void) //RawData数据协议 直接当串口助手使用 测试是否可行
{
u1_SendByte(0x40);
u1_SendByte(0x41);
u1_SendByte(0x42);
u1_SendByte(0x43);
u1_SendByte(0x0d);
u1_SendByte(0x0a);
}
3、测试
测试成功,单片机发什么,就接收什么,就相当于一个串口助手
firewater协议格式
firewater:本协议是CSV风格的字符串流,直观简洁,编程像printf简单。但由于字符串解析消耗更多的运算资源(无论在上位机还是下位机),建议仅在通道数量不多、发送频率不高的时候使用。
1、使用方法
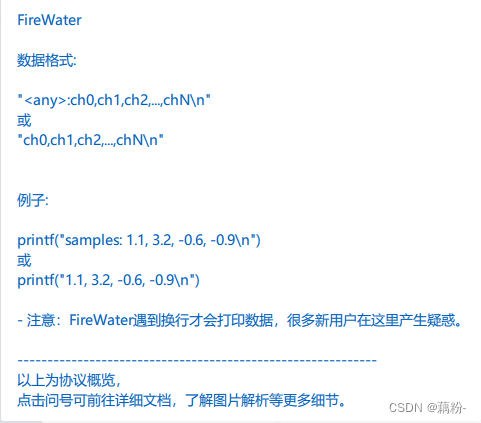
FireWater
遇到换行才会打印数据,而且数据之间用逗号隔开,换行打印数据,并且显示数据曲线
2、数据格式
"<any>:ch0,ch1,ch2,...,chN\n"
● any和冒号可以为空,但换行(\n)不可省略;
● any不可以为"image",这个前缀用于解析图片数据;
● 此处\n为换行,并非指字符斜杠+字符n;
● \n也可以为\n\r,或\r\n。
3、示例
说白了,就是/n就会打印数据,逗号隔开通道
一个通道就
数据 \n
这就会显示这个通道的曲线,并且动态显示
两个通道
数据1 ,数据2 \n
代表两个通道,ch1和ch2,并将数据变化曲线动态显示
//FireWater数据协议 换行结尾 /n或/r/n 逗号分隔通道
//指定三个通道
float a=5,b=10,c=20;
void FireWater_Test(void)
{
a+=100;
b+=50;
c+=10;
u1_printf("%.2f,%.2f,%.2f\n",a,b,c);
}
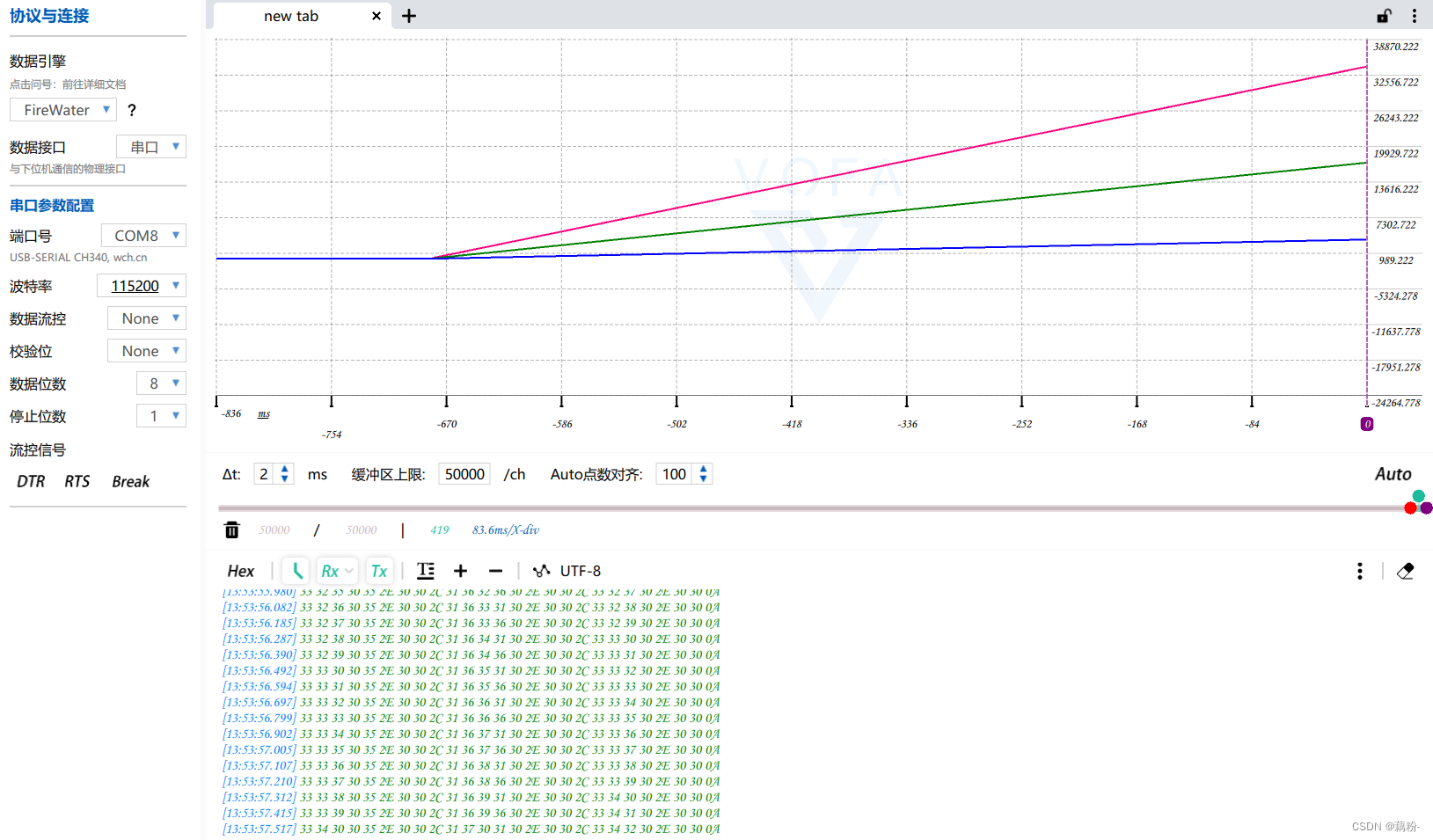
4、测试
测试成功 三条通道都成功输出波形
justfloat协议格式
justfloat:本协议是小端浮点数组形式的字节流协议,纯十六进制浮点传输,节省带宽。此协议非常适合用在通道数量多、发送频率高的时候。
1、使用方法
小端浮点数组的形式传输数据,适用于通道数量多,且发送频率高的场景
2、数据格式
#define CH_COUNT <N>
struct Frame {
float ch_data[CH_COUNT];
unsigned char tail[4]{
0x00, 0x00, 0x80, 0x7f};
};
● ch_data为小端浮点数组,里面放着需要发送的CH_COUNT个通道。
● tail为帧尾。
说白了就是,数据格式就是
浮点数据1,浮点数据2…帧尾
这里的帧尾是 0x00, 0x00, 0x80, 0x7f

3、示例
大家可以看示例,发送4个数据,把浮点数转换成了4个字节数据,然后加上帧尾。

我们如何把浮点数据与4个单字节转换?
大家可以看下面这篇链接:
浮点数据与4个单字节的转换
有了上面的认识之后,我们已经知道了如何将浮点数据转换为4个单字节的数据
所以我们在使用justfloat协议,把要传入的浮点数,转换为4个字节,然后帧尾结束就可以了,这样一个数据就发送到上位机了,上位机根据协议进行解析,将数据动态显示
/*
要点提示:
1. float和unsigned long具有相同的数据结构长度
2. union据类型里的数据存放在相同的物理空间
*/
typedef union
{
float fdata;
unsigned long ldata;
} FloatLongType;
/*
将浮点数f转化为4个字节数据存放在byte[4]中
*/
void Float_to_Byte(float f,unsigned char byte[])
{
FloatLongType fl;
fl.fdata=f;
byte[0]=(unsigned char)fl.ldata;
byte[1]=(unsigned char)(fl.ldata>>8);
byte[2]=(unsigned char)(fl.ldata>>16);
byte[3]=(unsigned char)(fl.ldata>>24);
}
void JustFloat_Test(void) //justfloat 数据协议测试
{
float a=1,b=2; //发送的数据 两个通道
u8 byte[4]={
0}; //float转化为4个字节数据
u8 tail[4]={
0x00, 0x00, 0x80, 0x7f}; //帧尾
//向上位机发送两个通道数据
Float_to_Byte(a,byte);
//u1_printf("%f\r\n",a);
u1_SendArray(byte,4); //1转化为4字节数据 就是 0x00 0x00 0x80 0x3F
Float_to_Byte(b,byte);
u1_SendArray(byte,4); //2转换为4字节数据 就是 0x00 0x00 0x00 0x40
//发送帧尾
u1_SendArray(tail,4); //帧尾为 0x00 0x00 0x80 0x7f
}
4、测试
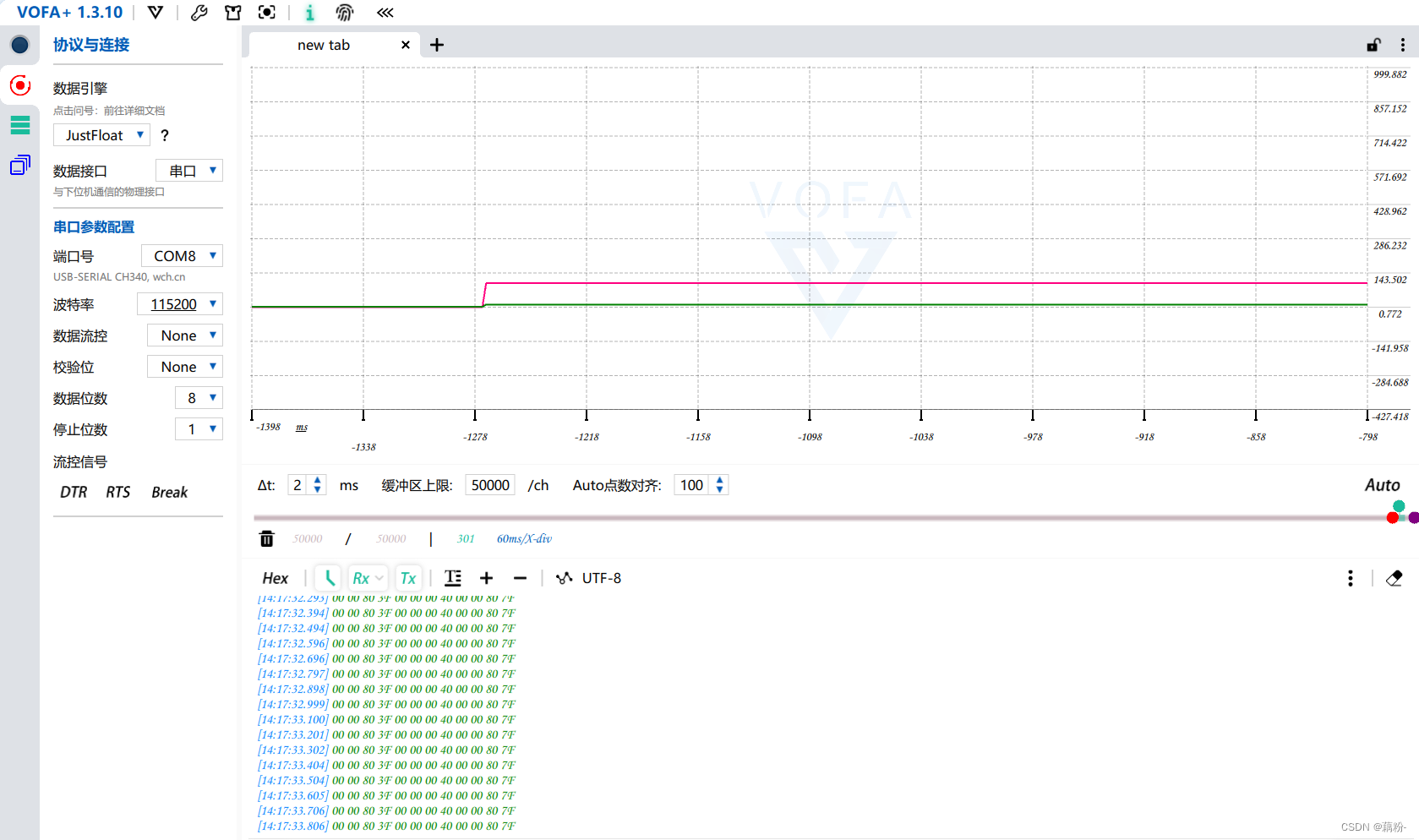
测试结果如下,上位机解析成功
我发送的1和2数据,加上帧尾,这就是一个完整的数据帧
完整的数据帧是这样子
00 00 80 3F 00 00 00 40 00 00 80 7F
分别表示 1 2 帧尾
可以看到两条数据曲线
三种协议使用总结
-
大家如果只是想把VOFA+当普通的串口助手,可以
选择RawData协议 -
大家如果对于数据传输通道数量不多、发送频率不高,而又想动态显示数据曲线的时候,可以
选择firewater协议 -
而
justfloat协议适用于通道数量多、发送频率高的时候,这是和firewater协议的最本质区别。
二、PID调参
由于首先学习的是PID的位置式,所以本文以PID位置式来调节速度环,大家可以看看这个VOFA+上位机软件,直观感受一下
PID位置式
计算目标和实际的误差,经过pid计算后得到输出,返回
float PID_realize(float temp_val) //tem_val为实际速度
{
//计算目标值与实际值的误差
pid.err=pid.target_val-temp_val;
//误差累积
pid.integral+=pid.err;
//PID算法实现
pid.actual_val=pid.Kp*pid.err+pid.Ki*pid.integral+pid.Kd*(pid.err-pid.err_last);
//误差传递
pid.err_last=pid.err;
//返回当前实际值
return pid.actual_val;
}
调参记录
周期读取脉冲数 这里定的是10ms
设置目标速度30(这里脉冲数近似速度) 读取到的脉冲数作为pid输入
经过pid计算后的out传入pwm设置占空比
kp
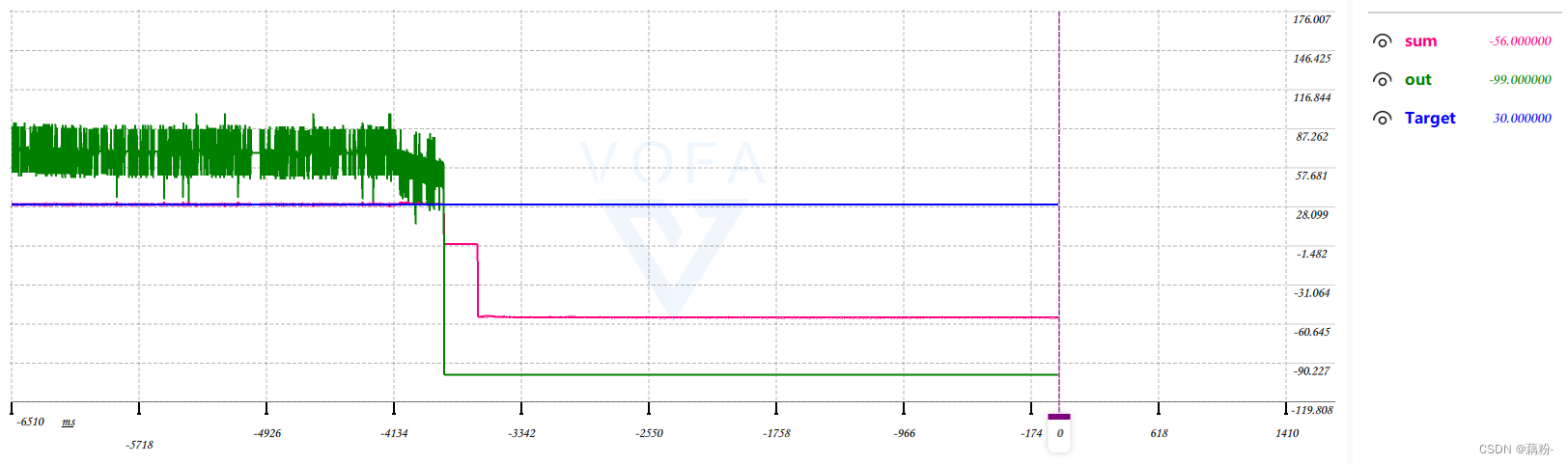
- 1、判断kp极性
kp= -10
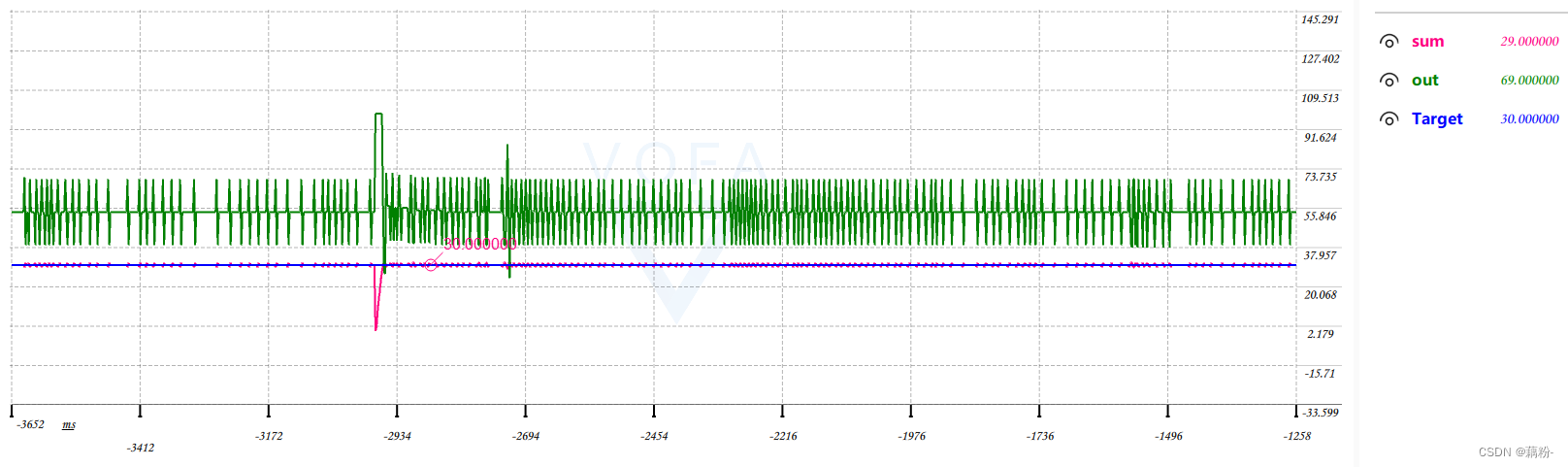
绿线表示pid运算得出的结果值
红线表示实际速度
蓝线表示目标速度
使用上位机查看曲线,可以看到,并没有很快的接近目标值,并且输出以最大转速,说明kp极性反了
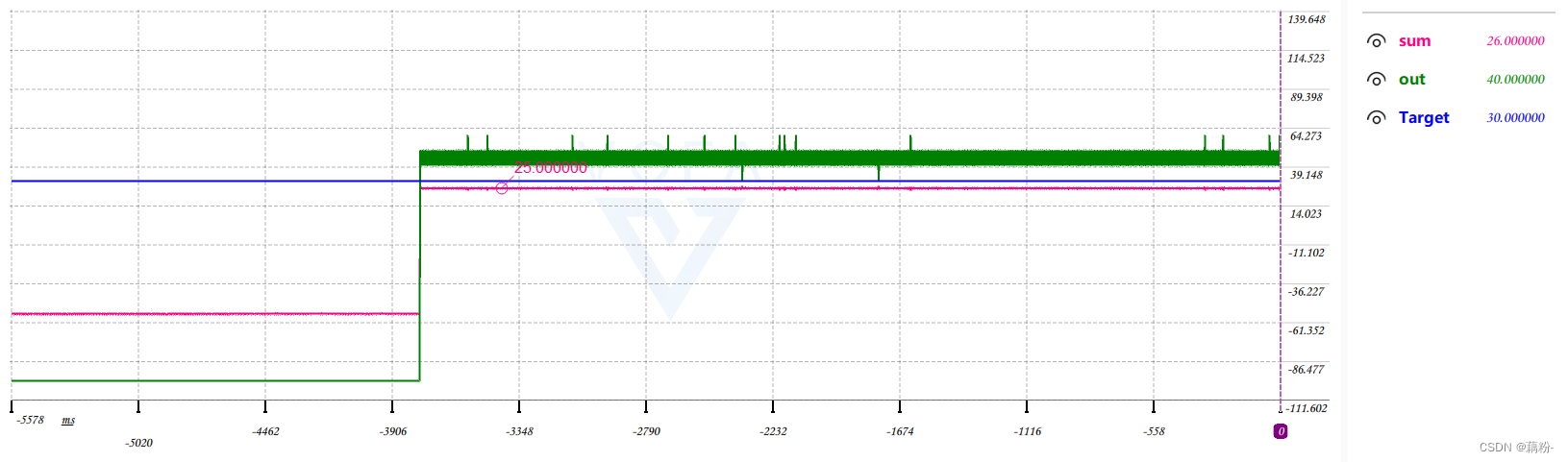
- 调节kp
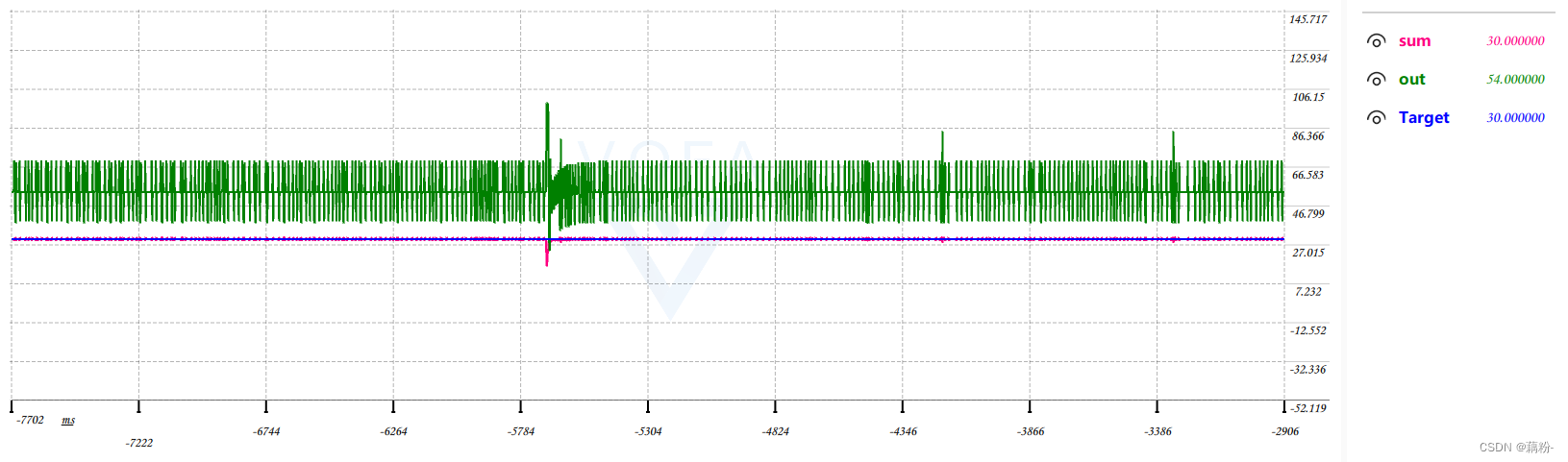
kp=10
可以看到这次的极性正确了,曲线迅速接近目标速度,达到25
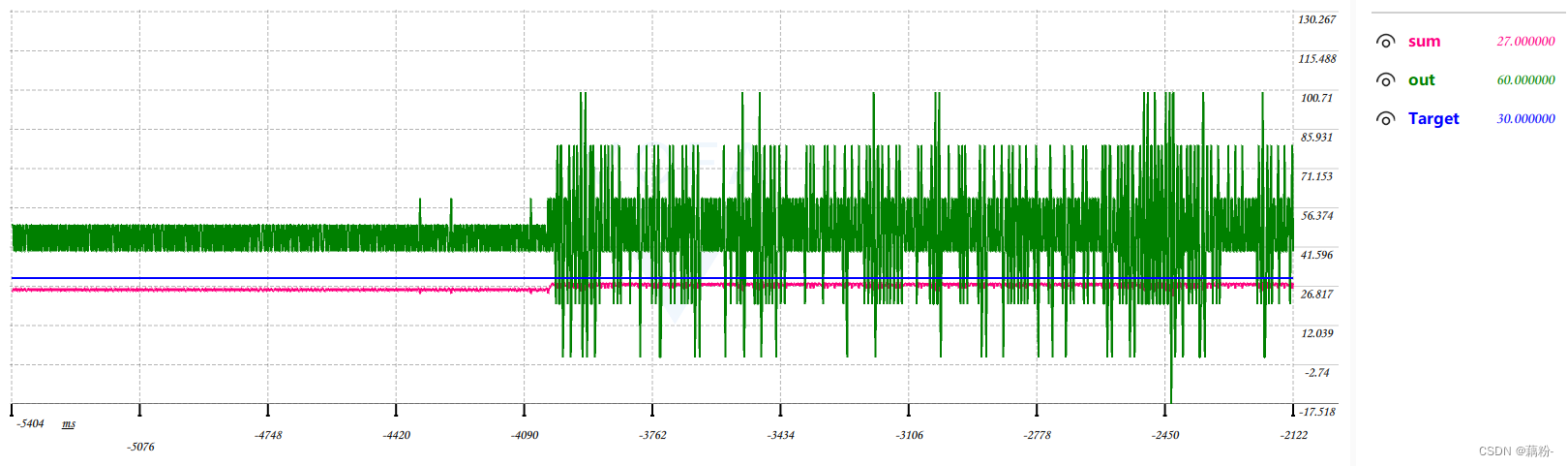
再次调节kp
kp=20
可以看到,这一次实际速度更加接近目标值了,但是实际速度曲线有些抖动,这说明我们应该是到kp的极限了,所以我们往下调一下
再次调节kp
kp=15
这次看到kp=15的时候,和20的时候,实际速度差不多,而且pid输出的曲线也更加平滑了,所以我们就取kp=15
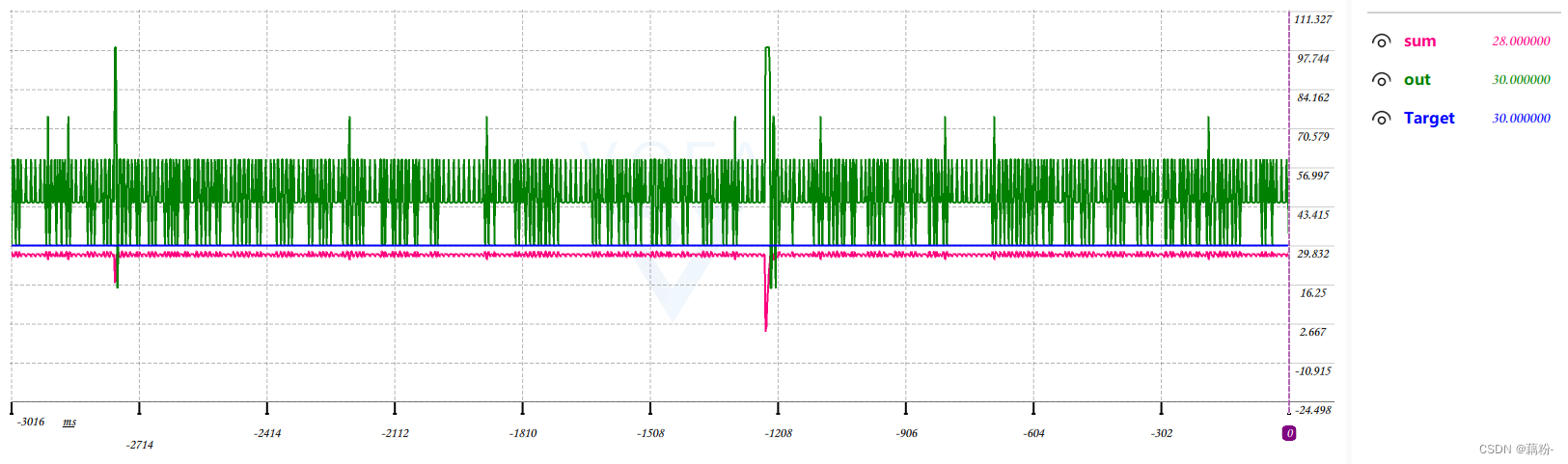
但是无论怎么调,我们都无法达到目标值,所以这个时候就需要积分,即ki
ki
ki=0.5
可以看到实际值迅速到达目标值,且调参效果较好,我们再加加ki看看
调节ki
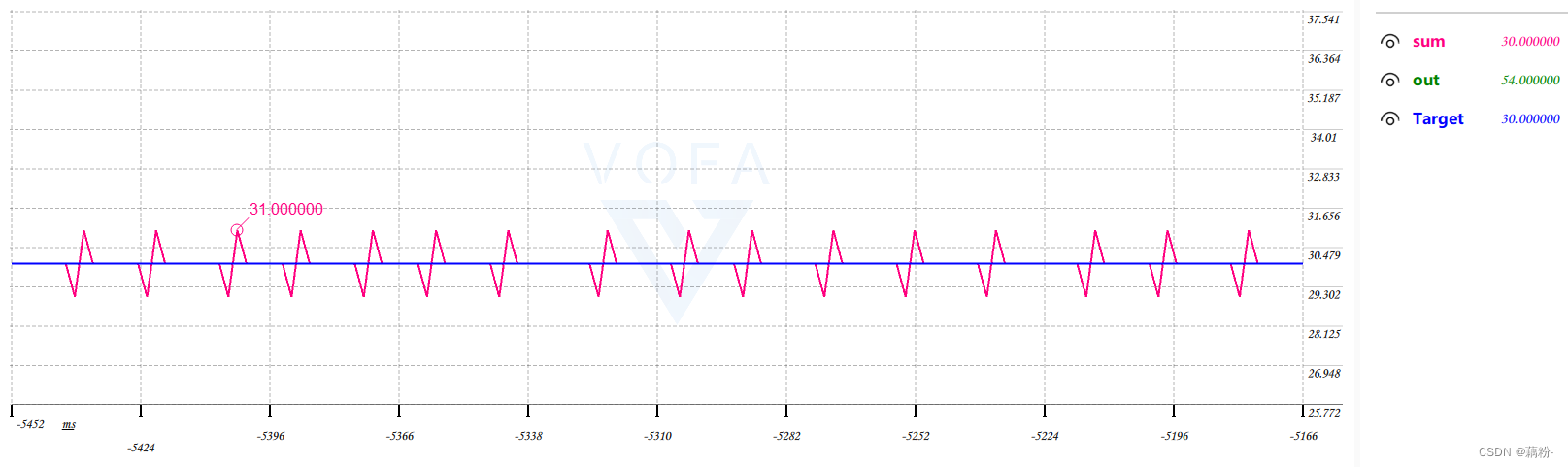
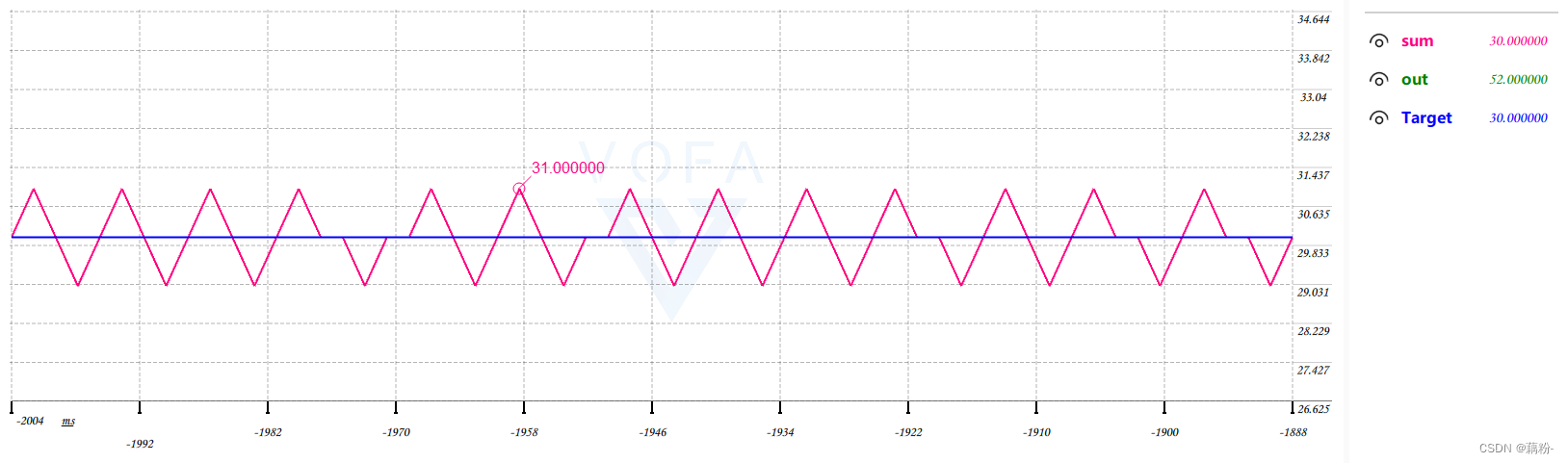
ki=1.0
可以看到,这与我们期望的速度相同,大体实现速度环要求,上下误差2,速度较为平稳
kd
试试kd
kd=1.0
调节kd后,曲线震荡的周期变快了,我们可以和上一个曲线对比
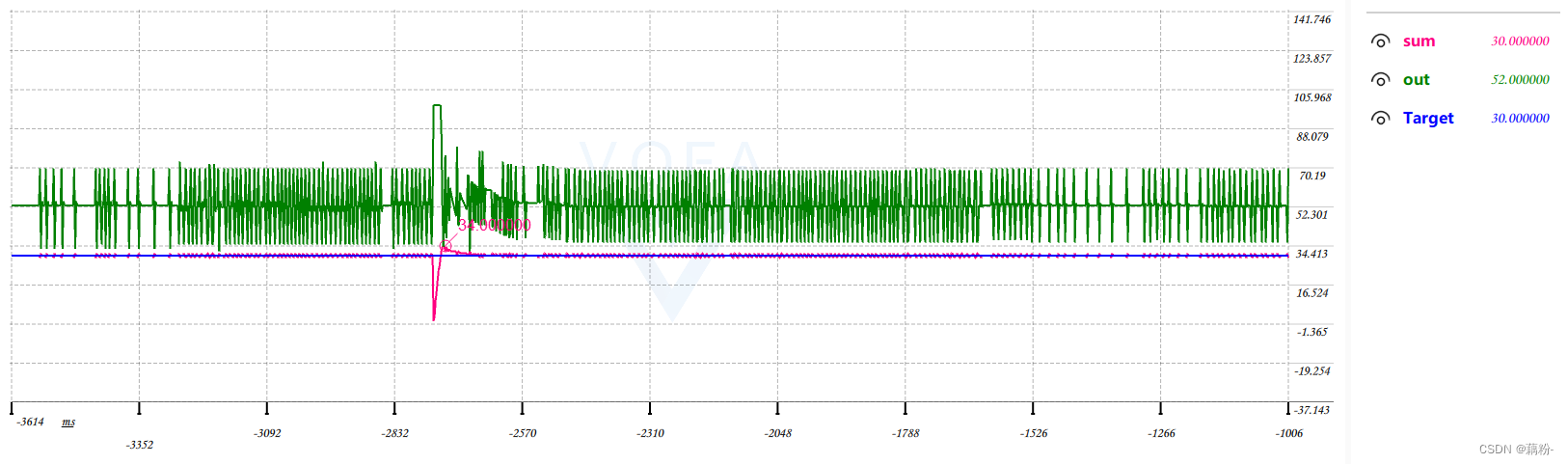
看,曲线的震荡频率加快
虽然目前还没有完全理解这几个参数,但大体上了解这个参数应该如何调节,这个参数实际上使用VOFA+可视化曲线一边调一遍看,调节就很好调了
注意:我这里只是以VOFA+调节PID参数直观显示为例,如果调节错误,还请大家多多包含。
三、总结
本文总结了VOFA+的使用,以及三种数据传输协议的使用方法和示例。
大家可以直接使用我的示例,稍微修改一下就可以直接使用VOFA+上位机软件了
然后展示了如何使用VOFA+软件调节PID参数,很明显这里的PID参数调节还存在很多问题
目前还在学习中
如果错误,欢迎指出