本文章将会介绍最高响应比优先的进程调度算法,并按照以下需求进行实现:
代码在文章最后
- 由用户输入每个进程的名称、要求运行时间
- 每一轮调度,计算每个进程的响应比,R = (W+S)/S=1+W/S,W:等待时间,S:预计执行时间
- 每次调度响应比最高的就绪进程
- 若某进程“要求运行时间” ==“已运行时间”,则将其状态置为“结束” ,并退出队列 运行程序,显示每次调度时被调度运行的进程名称,以及各进程控制块的动态变化过程
一、什么是最高响应比优先的进程调度算法
高响应比优先调度算法(Highest Response Ratio Next)是一种对CPU中央控制器响应比的分配的一种算法。HRRN是介于FCFS(先来先服务算法)与SJF(短作业优先算法)之间的折中算法,既考虑作业等待时间又考虑作业运行时间,既照顾短作业又不使长作业等待时间过长,改进了调度性能。该算法使等待时间较长的长作业也能获得执行的机会 但每次调度时都要估算响应比,会消耗较多的CPU时间。
响应比的计算方法如下所示:
响应比 =(等待时间+要求服务时间)/ 要求服务时间,即RR=(w+s)/s=1+w/s,因此响应比一定是大于等于1的,其中,W:等待时间,S:预计执行时间。
二、进程pcb中必须包含的元素
进程pcb必须包含以下元素,可以更具需求继续扩充:
| 进程id |
| 进程需要运行的时间 |
| 进程等待时间 |
| 进程的响应比 |
| 进程状态 |
三、示例展示
进程队列如下:
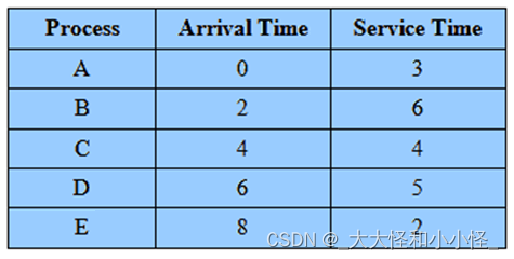
进程服务如下:

执行的顺序如下:
A——>B——>C——>E——>D
四、具体实现
4.1、数据结构
在代码实现中使用的是链式结构,使得每个进程通过指针连接起来,这样使得在查询最高响应比的进程的时候方便,同时也使得进程的添加更加方便。
4.2、算法核心
该算法的核心有二,第一个是进程队列的响应比的更新,由于最高响应比优先的进程调度是非抢占式的,所以每个进程在执行完后,进程队列中的进程的等待时间要做响应的调整,并重新计算响应比。第二个是找到进程队列中响应比最高的进程,而找到响应比最高的进程有两种方法,第一种是遍历进程队列的所有进程的响应比找到最大的,该方法的时间复杂度是O(n);第二种是对所有进程进行排序,该方法的时间复杂度至少为n*logn。在作者的实现代码中是使用的第一种方法。
4.3、代码实现
#include <stdio.h>
#include <stdlib.h>
//最高响应比
typedef struct pcb {
int pid;
char state;//E为完成,R为正在运行,W为在就绪队列
int total_time;//需要的时间
double waittime;//等待时间
double response;//响应比
int cputime;//已经执行的时间
int mark;//标志位,用来表示正在执行的进程,1为在cpu,0为不在cpu
struct pcb* next;
}*proc;
//初始化进程,需要用户输入进程id和需要cpu的时间
proc init_pcb(struct pcb* head,struct pcb* tail,int mark,int* proc_num) {
int i;
//防止进程id重复
//static int pcb_id[20] = { 0 };
//static int pcb_id_index = 0;
int numofpcb;
proc p, tmp;
printf("please input the number of process:\n");
scanf("%d", &numofpcb);
printf("there are %d processes,please input pcb info:\n", numofpcb);
p = (proc)malloc(sizeof(struct pcb));
printf("process id:");
scanf("%d", &p->pid);
//do {
//printf("process id:");
//scanf("%d", &p->pid);
// if (pcb_id_index != 0) {
// for (int i = 0; i < pcb_id_index; i++) {
// if (p->pid == pcb_id[i]) {
// printf("process id exist!\n");
// break;
// }
// }
// }
//} while (1);
//pcb_id[pcb_id_index] = p->pid;
//pcb_id_index++;
p->response = 1.0;
printf("cputime required:");
scanf("%d", &p->total_time);
p->state = 'W';
p->cputime = 0;
p->mark = mark;
p->waittime = 0;
head = p;
for (i = numofpcb; i > 1; i--) {
tmp = p;
p = (proc)malloc(sizeof(struct pcb));
printf("process id:");
scanf("%d", &p->pid);
p->response = 1.0;
printf("cputime required:");
scanf("%d", &p->total_time);
p->state = 'W';
p->cputime = 0;
p->mark = 0;
p->waittime = 0;
tmp->next = p;
}
tail = p;
p->next = head;
*proc_num = (*proc_num) + numofpcb;
return tail;
}
//找到响应比最大的进程,并返回该进程
proc find_max_response(proc node, struct pcb* head,int* proc_num) {
double maxresponse;
proc p = head;
proc tmp = p, res = p;
//在进程队列中找到响应比最大的进程
tmp = node;
proc find = head;
maxresponse = find->response;
for (int i = 0; i < *proc_num; i++) {
if (find->response > maxresponse) {
res = find;
tmp->mark = 0;
res->mark = 1;
tmp = res;
maxresponse = res->response;
}
find = find->next;
}
return res;
}
//调整所有进程的响应,正在执行的进程响应不变,重新计算其他进程的响应比
//因为为抢占式的,平且进程队列会将完成的进程从进程队列删除,所以在进程队列中的进程全是需要调整响应比的
void set_all_process_response(proc head,int* proc_num,proc ntodo) {
proc tmp = head;
for (int i = 0; i < *proc_num; i++)
{
tmp->waittime = tmp->waittime + ntodo->total_time;
tmp->response = 1 + tmp->waittime / tmp->total_time;
tmp = tmp->next;
}
}
//打印进程的pid、waittime、req_time、response
void display(struct pcb* head,int* proc_num) {
int i;
proc p = head;
printf("pid\twait\treq_time\tresponse\n");
for (i = 0; i < *proc_num; i++) {
printf("%d\t%.0lf\t%d\t\t%lf\n", p->pid, p->waittime, p->total_time, p->response);
p = p->next;
}
printf("----------------------------------\n");
}
//删除已经执行完成的进程,并返回进程队列的尾指针
proc delete_finished_pro(proc node, struct pcb* head, struct pcb* tail,int* proc_num) {
if (head == tail) {
return NULL;
}
proc pre = tail;
for (int i = 0; i < *proc_num; i++) {
if (pre->next->pid == node->pid) {
pre->next = node->next;
tail = pre;
head = pre->next;
break;
}
}
//调整进程数量
(*proc_num)--;
return tail;
}
//插入新进程,使用init_pcb()函数完成该功能,并将新进程插入到原进程队列
//中得到新进程队列,并返回新进程队列的尾指针
proc insert_proc(int* insertnum,proc head,proc tail,int* proc_num) {
proc inhead = NULL, intail = NULL;
intail = init_pcb(inhead, intail, 0,proc_num);
inhead = intail->next;
proc tmp = inhead;
tail->next = inhead;
tail = intail;
tail->next = head;
//*proc_num = (*proc_num) + *insertnum;
return tail;
}
//用户选择是否插入新进程,返回进程队列的尾指针
proc judg_insert_proc(int* insertnum,proc head,proc tail,int* proc_num) {
int choice = 0;
/*proc intail;*/
printf("insert new processes or not,please input number(1 yes,0 no):");
scanf("%d", &choice);
if (choice == 1) {
if (head == NULL) {
tail = init_pcb(head, tail, 1, proc_num);
head = tail->next;
return tail;
}
tail = insert_proc(insertnum, head, tail,proc_num);
}
return tail;
}
//基于动态优先级的进程调度算法,找出优先级最大的进程执行,每一个cpu时间片,调整一次
//所有进程的优先级,再重新寻找优先级最高的进程
void priority(struct pcb* head, struct pcb* tail,int* proc_num) {
int* insertnum = (int*)malloc(sizeof(int));
proc intail, inhead;
*insertnum = 0;
int i, round;
double maxlevel;
round = 1;
proc p = head;
proc t = tail;
proc ntodo, nowmark;
nowmark = p;
ntodo = p;//response最大的,马上要做的
maxlevel = p->response;
for (i = 0; i < *proc_num; i++) {
p = p->next;
if (p->response > maxlevel) {
ntodo = p;
nowmark->mark = 0;
ntodo->mark = 1;
nowmark = ntodo;
maxlevel = ntodo->response;
}
}
while (ntodo->total_time > ntodo->cputime)
{
*insertnum = 0;
printf("\n* Round %d, Process %d is running\n", round, ntodo->pid);
round = round + ntodo->total_time;
ntodo->state = 'E';
set_all_process_response(head,proc_num,ntodo);
tail = delete_finished_pro(ntodo, head, tail, proc_num);
if (tail == NULL) {
head = NULL;
}
else
{
head = tail->next;
display(head, proc_num);
}
printf("\n▲ process %d is finished\n", ntodo->pid);
if (head == tail&&head==NULL) {
tail = judg_insert_proc(insertnum, head, tail, proc_num);
if (tail == NULL) {
printf("over!!!\n");
return;
}
head = tail->next;
}
else
{
tail= judg_insert_proc(insertnum, head, tail, proc_num);
head = tail->next;
}
ntodo = find_max_response(ntodo,head, proc_num);
}
}
int main() {
int* proc_num = (int*)malloc(sizeof(int));
*proc_num = 0;
int mark = 1, inmark = 0;
struct pcb* head = NULL, * tail = NULL;
tail = init_pcb(head, tail,mark,proc_num);
head = tail->next;
display(head,proc_num);
priority(head,tail,proc_num);
return 0;
}