帧内模板匹配预测(Intra TMP,Intra Template Matching Prediction)是一种特殊的帧内预测编码工具,主要用于屏幕内容编码(screen content coding,SCC)。
TMP通过L形模板与当前帧已重建部分进行匹配,并将其对应的块作为当前块的预测值。对于预定义的搜索范围,编码器在当前帧的重构部分中搜索与当前模板最相似的模板,并将对应的块作为预测块。 编码器然后用信号通知这种模式的使用,并且在解码器侧执行相同的预测操作。如下图所示:
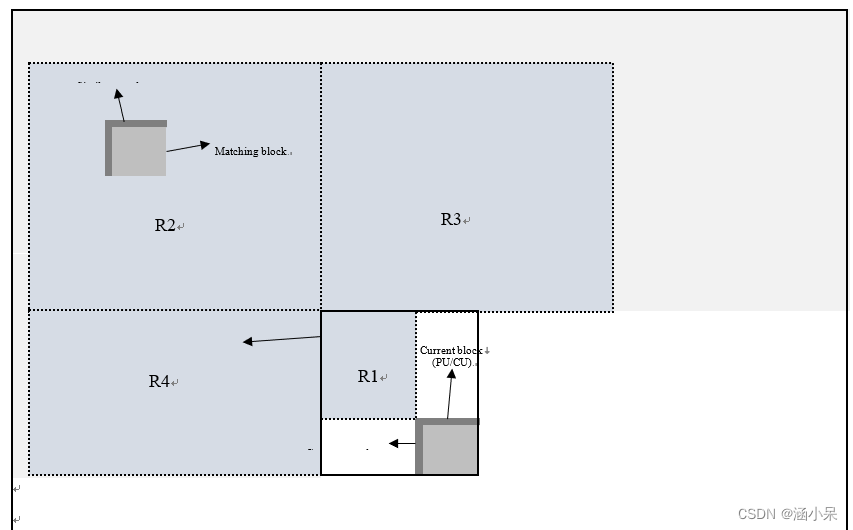
通过将当前块的 L-shaped相邻模板与上图中预定义搜索区域中的另一个块匹配来生成预测信号,具体来说,搜索范围分为 4 个区域:
- R1: within the current CTU
- R2: top-left outside the current CTU
- R3: above the current CTU
- R4: left to the current CTU
在每个区域内,搜索相对于当前模板具有最小 SAD 的参考模板,并将其对应的参考块作为预测块。
所有区域的尺寸(SearchRange_w、SearchRange_h)都设置为与块尺寸(BlkW、BlkH)成正比,以便每个像素具有固定数量的 SAD 比较。 即:
SearchRange_w = a * BlkW
SearchRange_h = a * BlkH
其中“a”是控制增益/复杂度权衡的常数。 实际上,“a”等于 5。
实验性能:(基于VTM10.0,实验结果来源于提案JVET-V0130)
| All Intra Main10 |
|||||
| Over VTM10 |
|||||
| Y |
U |
V |
EncT |
DecT |
|
| Class A1 |
-0.06% |
-0.01% |
-0.07% |
198% |
203% |
| Class A2 |
-0.60% |
-0.84% |
-0.87% |
182% |
171% |
| Class B |
-0.48% |
-0.51% |
-0.55% |
182% |
183% |
| Class C |
-0.15% |
-0.16% |
-0.13% |
159% |
134% |
| Class E |
-0.73% |
-0.92% |
-0.90% |
174% |
160% |
| Overall |
-0.40% |
-0.47% |
-0.49% |
178% |
168% |
| Class D |
0.03% |
-0.02% |
0.07% |
135% |
118% |
| Class F |
-2.16% |
-2.03% |
-2.05% |
132% |
285% |
| Class TGM |
-6.47% |
-6.13% |
-6.16% |
133% |
487% |
| Random Access Main 10 |
|||||
| Over VTM10 |
|||||
| Y |
U |
V |
EncT |
DecT |
|
| Class A1 |
0.02% |
0.19% |
0.17% |
126% |
119% |
| Class A2 |
-0.22% |
-0.18% |
-0.21% |
114% |
103% |
| Class B |
-0.17% |
-0.28% |
-0.02% |
119% |
108% |
| Class C |
0.01% |
0.05% |
0.08% |
113% |
79% |
| Class E |
|||||
| Overall |
-0.09% |
-0.08% |
0.01% |
118% |
101% |
| Class D |
0.08% |
0.24% |
0.19% |
112% |
109% |
| Class F |
-0.97% |
-1.07% |
-0.91% |
117% |
120% |
| Class TGM |
-2.86% |
-2.79% |
-2.74% |
117% |
138% |
可以看出All Intra下解码端时间复杂度非常高,同时在屏幕内容序列(Class F和Class TGM)上效果很好,同时在CTC序列上也可以带来一定增益(-0.4%)。
TMP根据相邻可用像素分为三种模板:L-shape模板、左模板和上模板
enum RefTemplateType
{
L_SHAPE_TEMPLATE = 1,
LEFT_TEMPLATE = 2,
ABOVE_TEMPLATE = 3,
NO_TEMPLATE = 4
};首先调用 getTargetTemplate 函数来获取目标模板(即当前CU的模板)
#if JVET_W0069_TMP_BOUNDARY
// 目标模板,即当前CU块模板
void IntraPrediction::getTargetTemplate( CodingUnit* pcCU, unsigned int uiBlkWidth, unsigned int uiBlkHeight, RefTemplateType tempType )
#else
void IntraPrediction::getTargetTemplate( CodingUnit* pcCU, unsigned int uiBlkWidth, unsigned int uiBlkHeight )
#endif
{
const ComponentID compID = COMPONENT_Y;
unsigned int uiPatchWidth = uiBlkWidth + TMP_TEMPLATE_SIZE;
unsigned int uiPatchHeight = uiBlkHeight + TMP_TEMPLATE_SIZE;
unsigned int uiTarDepth = floorLog2( std::max( uiBlkHeight, uiBlkWidth ) ) - 2;
Pel** tarPatch = m_pppTarPatch[uiTarDepth]; // 目标模板
CompArea area = pcCU->blocks[compID];
Pel* pCurrStart = pcCU->cs->picture->getRecoBuf( area ).buf; // 当前块左上角的重建像素
unsigned int uiPicStride = pcCU->cs->picture->getRecoBuf( compID ).stride;
unsigned int uiY, uiX;
//fill template 填充模板
//up-left & up
Pel* tarTemp;
#if JVET_W0069_TMP_BOUNDARY
if( tempType == L_SHAPE_TEMPLATE )
{
#endif
// 填充左上和上侧模板
Pel* pCurrTemp = pCurrStart - TMP_TEMPLATE_SIZE * uiPicStride - TMP_TEMPLATE_SIZE;
for( uiY = 0; uiY < TMP_TEMPLATE_SIZE; uiY++ )
{
tarTemp = tarPatch[uiY];
for( uiX = 0; uiX < uiPatchWidth; uiX++ )
{
tarTemp[uiX] = pCurrTemp[uiX];
}
pCurrTemp += uiPicStride;
}
//left 填充左侧模板
for( uiY = TMP_TEMPLATE_SIZE; uiY < uiPatchHeight; uiY++ )
{
tarTemp = tarPatch[uiY];
for( uiX = 0; uiX < TMP_TEMPLATE_SIZE; uiX++ )
{
tarTemp[uiX] = pCurrTemp[uiX];
}
pCurrTemp += uiPicStride;
}
#if JVET_W0069_TMP_BOUNDARY
}
else if( tempType == ABOVE_TEMPLATE ) // 填充上模板
{
Pel* pCurrTemp = pCurrStart - TMP_TEMPLATE_SIZE * uiPicStride;
for( uiY = 0; uiY < TMP_TEMPLATE_SIZE; uiY++ )
{
tarTemp = tarPatch[uiY];
for( uiX = 0; uiX < uiBlkWidth; uiX++ )
{
tarTemp[uiX] = pCurrTemp[uiX];
}
pCurrTemp += uiPicStride;
}
}
else if( tempType == LEFT_TEMPLATE ) // 填充左侧模板
{
Pel* pCurrTemp = pCurrStart - TMP_TEMPLATE_SIZE;
for( uiY = TMP_TEMPLATE_SIZE; uiY < uiPatchHeight; uiY++ )
{
tarTemp = tarPatch[uiY];
for( uiX = 0; uiX < TMP_TEMPLATE_SIZE; uiX++ )
{
tarTemp[uiX] = pCurrTemp[uiX];
}
pCurrTemp += uiPicStride;
}
}
#endif
}之后 candidateSearchIntra 函数通过调用 searchCandidateFromOnePicIntra 在搜索区域内搜索最佳模板
#if JVET_W0069_TMP_BOUNDARY
void IntraPrediction::candidateSearchIntra( CodingUnit* pcCU, unsigned int uiBlkWidth, unsigned int uiBlkHeight, RefTemplateType tempType )
#else
void IntraPrediction::candidateSearchIntra( CodingUnit* pcCU, unsigned int uiBlkWidth, unsigned int uiBlkHeight )
#endif
{
const ComponentID compID = COMPONENT_Y;
const int channelBitDepth = pcCU->cs->sps->getBitDepth( toChannelType( compID ) );
unsigned int uiPatchWidth = uiBlkWidth + TMP_TEMPLATE_SIZE;
unsigned int uiPatchHeight = uiBlkHeight + TMP_TEMPLATE_SIZE;
unsigned int uiTarDepth = floorLog2( std::max( uiBlkWidth, uiBlkHeight ) ) - 2;
Pel** tarPatch = getTargetPatch( uiTarDepth );
//Initialize the library for saving the best candidates 初始化最大模板失真
m_tempLibFast.initTemplateDiff( uiPatchWidth, uiPatchHeight, uiBlkWidth, uiBlkHeight, channelBitDepth );
short setId = 0; //record the reference picture.
#if JVET_W0069_TMP_BOUNDARY
// 搜索最佳候选
searchCandidateFromOnePicIntra( pcCU, tarPatch, uiPatchWidth, uiPatchHeight, setId, tempType );
#else
searchCandidateFromOnePicIntra( pcCU, tarPatch, uiPatchWidth, uiPatchHeight, setId );
#endif
//count collected candidate number
int pDiff = m_tempLibFast.getDiff(); // 搜索到的候选模板的失真
int maxDiff = m_tempLibFast.getDiffMax(); // 最大失真
if( pDiff < maxDiff )
{
m_uiVaildCandiNum = 1; // 如果搜索到的候选模板失真小于最大失真,则存在可用候选项
}
else
{
m_uiVaildCandiNum = 0;
}
}最后在 generateTMPrediction 函数中根据搜索的最佳位置偏移来获取预测值
bool IntraPrediction::generateTMPrediction( Pel* piPred, unsigned int uiStride, unsigned int uiBlkWidth, unsigned int uiBlkHeight, int& foundCandiNum )
{
bool bSucceedFlag = true;
unsigned int uiPatchWidth = uiBlkWidth + TMP_TEMPLATE_SIZE;
unsigned int uiPatchHeight = uiBlkHeight + TMP_TEMPLATE_SIZE;
foundCandiNum = m_uiVaildCandiNum;
if( foundCandiNum < 1 )
{
return false;
}
// 坐标偏移
int pX = m_tempLibFast.getX();
int pY = m_tempLibFast.getY();
Pel* ref;
int picStride = getStride();
int iOffsetY, iOffsetX;
Pel* refTarget;
unsigned int uiHeight = uiPatchHeight - TMP_TEMPLATE_SIZE;
unsigned int uiWidth = uiPatchWidth - TMP_TEMPLATE_SIZE;
//the data center: we use the prediction block as the center now.
//collect the candidates
ref = getRefPicUsed();
{
iOffsetY = pY;
iOffsetX = pX;
refTarget = ref + iOffsetY * picStride + iOffsetX; // 移动
for( unsigned int uiY = 0; uiY < uiHeight; uiY++ )
{
for( unsigned int uiX = 0; uiX < uiWidth; uiX++ )
{
piPred[uiX] = refTarget[uiX];
}
refTarget += picStride;
piPred += uiStride;
}
}
return bSucceedFlag;
}