一.sensor驱动和初始化
(1)外部时钟timing:一般情况下sensor有master米模式和slave工作模式,主要区别是是否需要外部提供INCK和XHS,XVS同步时钟和信号,主模式下不需要,slave模式下需要FPGA根据手册提供特定频率的INCK时钟信号和XHS,XVS同步信号。
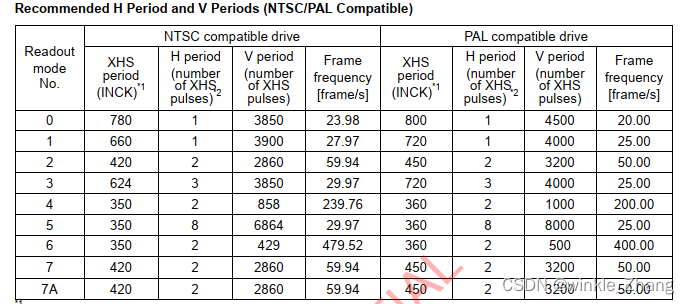
比如IMX274 SENSOR工作在mode2模式下,NTSC格式视频输出,一个XHS周期需要520个INCK周期信号,每个XVS周期包含2310和XHS信号。
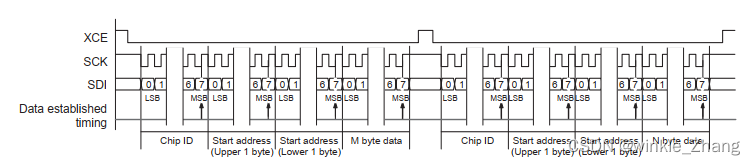
(2)寄存器配置:上电之后FPGA需要对sensor寄存器进行初始化配置,一般是通过IIC或者SPI协议向特定地址下写入初始化数据,IMX274和IMX118都是通过SPI进行配置,在写入地址和数据的时候,根据手册要求的写入格式,分别是chip ID,高8位地址,低8位地址和写入的数据参数(chipID,upper 1byte,lower 1byte ,N byte data),配置时序如下图:
二.数据解串处理
sensor输出的数据为串行信号,需要对信号进行解串。解串主要用xilinx的IDELAYE2和ISERDESE2功能原语,串行信号经过IDELAYE2对数据和时钟对齐之后输入到ISERDESE2进行解串,在解串对齐过程中关键需要理解bitslip信号和factor信号,他们分别用来移位寻找同步信号和对数据解串进行特定约束。
三.多路sensor的数据对齐统一
当同时驱动多个sensor并且对数据进行处理时,需要多数据进行对齐方便进行处理。数据对齐模块原理是将多组sensor数据写入fifo并按特定时序读出
四.视频格式转化(VS,DE转AXIS)
待更新
五.数据的组帧GT发送
待更新
六.GT数据解析和sensor反向控制
待更新