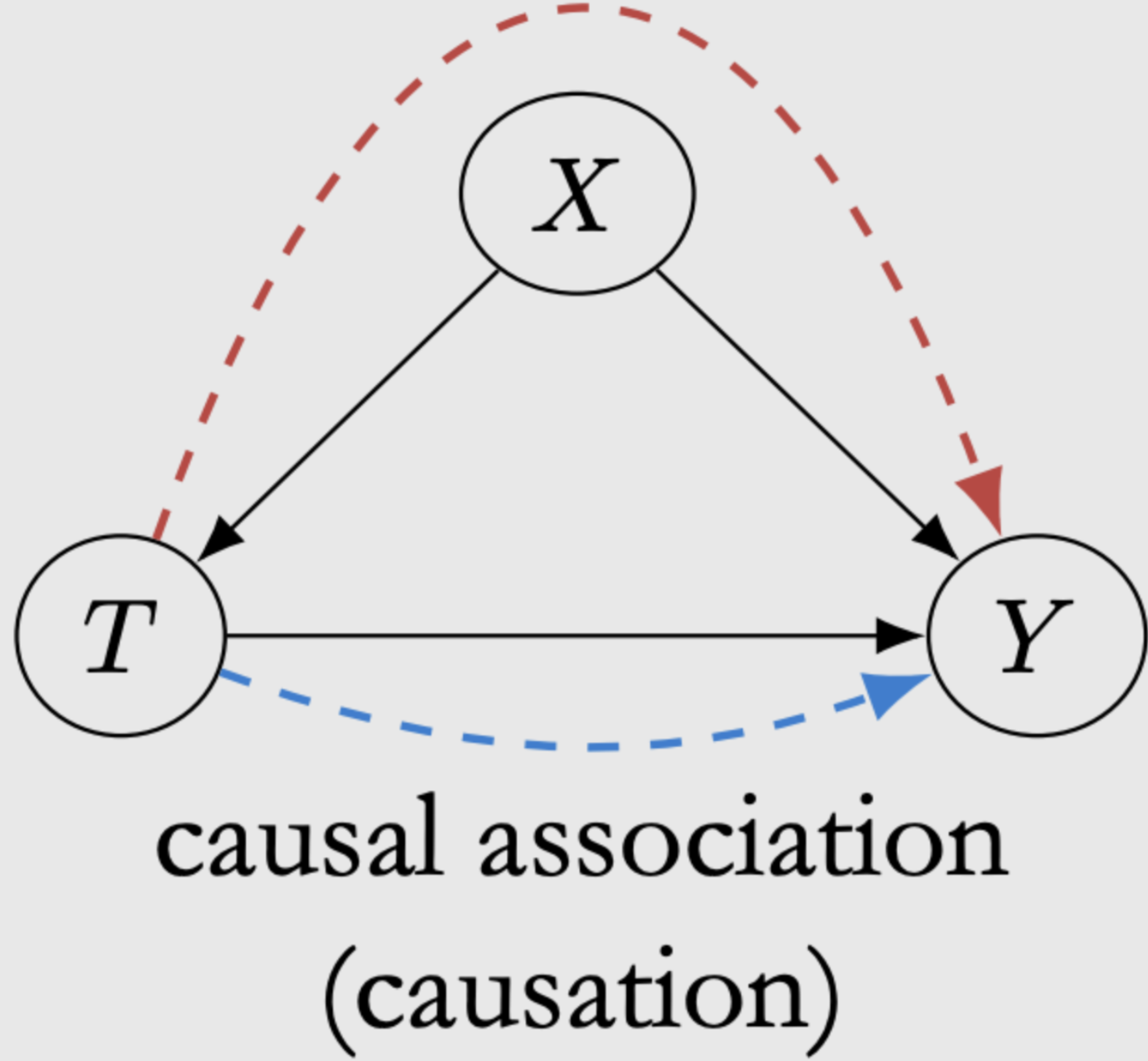
上一章我们介绍了潜在结果模型,这一章我们尝试从图的角度理解因果,大家都有图论基础,我就不多赘述图的基本概念了,在因果图里我们主要研究DAG(directed acyclic graph,有向无环图),如图1。

Bayesian Networks
贝叶斯网络,一个概率图模型,因果图就是由此内生而来,因此先介绍它,贝叶斯网络的职责是将概率和图模型结合起来,使得我们能直接利用图表示概率关系,而想用图模型来表示概率关系,需要先提出两个假设。
首先,我们从概率建模出发,如果我们相对一组数据的分布 P ( x 1 , x 2 , . . . , x n ) P(x_1,x_2,...,x_n) P(x1,x2,...,xn)建模,则根据条件概率的链式法则,我们可以将该分布分解为:
P ( x 1 , x 2 , . . . , x n ) = P ( x 1 ) ∏ i P ( x i ∣ x i − 1 , . . . , x 1 ) P(x_1,x_2,...,x_n)=P(x_1)\prod_iP(x_i|x_{i-1},...,x_1) P(x1,x2,...,xn)=P(x1)∏iP(xi∣xi−1,...,x1)
而如果给定图1,我们想求图1中的分布关系,我们就需要先定义图1对应的分布情况。
因此先提出一个最基础的假设:DAG中相邻的点是依赖关系。
利用这个假设,可以推出 P ( x 1 , x 2 , x 3 , x 4 ) = P ( x 1 ) P ( x 2 ∣ x 1 ) P ( x 3 ∣ x 2 , x 1 ) P ( x 4 ∣ x 3 , x 2 , x 1 ) P(x_1,x_2,x_3,x_4)=P(x_1)P(x_2|x_1)P(x_3|x_2,x_1)P(x_4|x_3,x_2,x_1) P(x1,x2,x3,x4)=P(x1)P(x2∣x1)P(x3∣x2,x1)P(x4∣x3,x2,x1)。但大家还记得概率论的话就会知道,这样没加一个变量,参数就会指数级上升,如图2所示。因此光是一个依赖假设还是不够,我们需要引入独立假设,减少不必要的计算量。

Local Markov assumption
局部马尔科夫假设。
为了避免指数爆炸的情况,我们想如果能让每个节点只依赖于其父节点就好了,这就是局部马尔科夫假设:给定一个DAG图,点X独立于其所有的非子孙节点。
再基于该假设,我们可以进一步将图1的概率分布分解为 P ( x 1 , x 2 , x 3 , x 4 ) = P ( x 1 ) P ( x 2 ∣ x 1 ) P ( x 3 ∣ x 2 , x 1 ) P ( x 4 ∣ x 3 ) P(x_1,x_2,x_3,x_4)=P(x_1)P(x_2|x_1)P(x_3|x_2,x_1)P(x_4|x_3) P(x1,x2,x3,x4)=P(x1)P(x2∣x1)P(x3∣x2,x1)P(x4∣x3),我们称之为Bayesian network factorization(贝叶斯网络分解),即给定一个概率分布P和DAG G,如果 P ( x 1 , . . . x n ) = ∏ i P ( x i ∣ p a i ) P(x_1,...x_n)=\prod_iP(x_i|pa_i) P(x1,...xn)=∏iP(xi∣pai),则P可以根据G进行分解,局部马尔科夫假设是这种贝叶斯网络分解形式的充要条件。
Minimality assumption
整合Local Markov assumption和”依赖“假设,我们便得到了极小假设:
-
给定一个DAG图,点X独立于其所有的非子孙节点。
-
DAG中相邻的点是依赖关系
我们称关于G且满足极小假设的P是马尔科夫的。
这就是贝叶斯网络的假设,下面我们看看因果图模型。
Causal graph
因果图。
首先,定义因果关系:如果变量Y响应于变量X的变化,则X是变量Y的因。
根据这个定义,因果图的第一个假设,Causal Edges Assumption(因果边假设):在一个有向图中,每一个父亲节点都是孩子节点的因。
这样因果图就基于两个假设:
- Minimality assumption
- Causal Edges Assumption
仅仅知道这两个假设理论上就可以求出所有的因果关系,但在实践中,当因果关系复杂起来就很难分析,因此我们需要总结一些基本的block。
两个节点之间的关系
图3是只考虑两个节点时的所有关系情况,(a)表示 x 1 x_1 x1和 x 2 x_2 x2没有边,其表示的概率关系为 P ( x 1 , x 2 ) = P ( x 1 ) P ( x 2 ) P(x_1, x_2)=P(x_1)P(x_2) P(x1,x2)=P(x1)P(x2), x 1 x_1 x1和 x 1 x_1 x1相互独立(Local Markov assumption);(b)表示 x 1 x_1 x1和 x 2 x_2 x2之间有因果关系, x 1 x_1 x1是 x 2 x_2 x2的因(Causal Edges Assumption),证明如下,我们对a和b的概率图进行贝叶斯分解得到:
(a): P ( x 1 , x 2 ) = P ( x 1 ) P ( x 2 ) P(x_1, x_2)=P(x_1)P(x_2) P(x1,x2)=P(x1)P(x2)
(b): P ( x 1 , x 2 ) = P ( x 1 ) P ( x 2 ∣ x 1 ) P(x_1,x_2)=P(x_1)P(x_2|x_1) P(x1,x2)=P(x1)P(x2∣x1)

三个节点之间的关系
如图4,当考虑三个节点时共有三种情况,我们首先分析chain和fork。
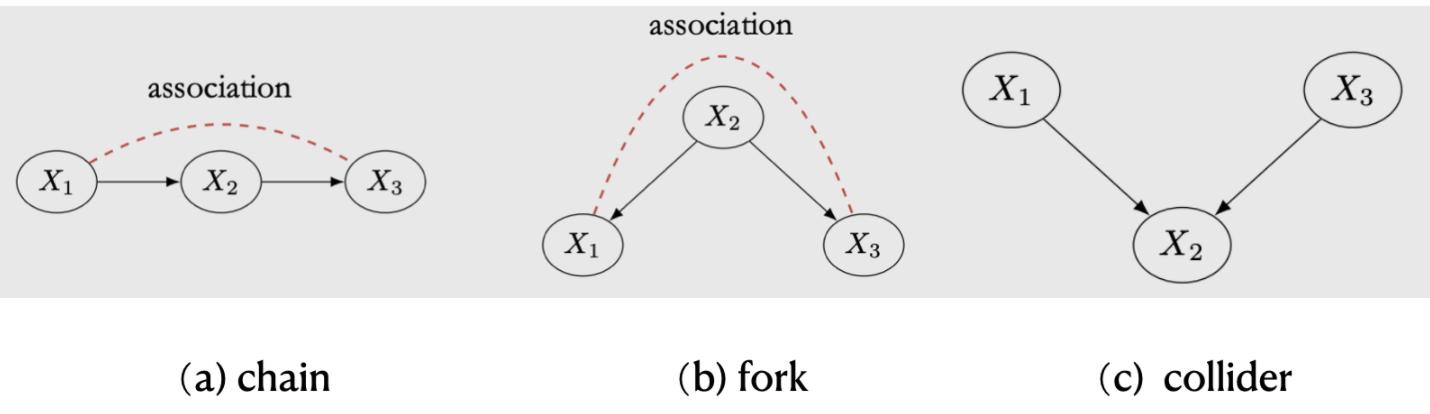
chains and forks
chains( 链式结构)和 forks (分叉结构)拥有相同的依赖关系(第10章会详细讨论),其依赖关系的传递如图4红线所示。
当我们同时condition on x2, chains 和 forks 还拥有相同的独立关系,x1和x3的关联被x2 blocked(阻断了),即 x 1 ⊥ ⊥ x 3 ∣ x 2 x_1 {\perp \!\!\! \perp} x_3|x_2 x1⊥⊥x3∣x2,如图5所示。

从概率角度分析,chain图得到:
P ( x 1 , x 2 , x 3 ) = P ( x 1 ) P ( x 2 ∣ x 1 ) P ( x 3 ∣ x 2 ) P(x_1,x_2,x_3)=P(x_1)P(x_2|x_1)P(x_3|x_2) P(x1,x2,x3)=P(x1)P(x2∣x1)P(x3∣x2)(Bayesian network factorization),
两边同时除以 P ( x 2 ) P(x_2) P(x2): P ( x 1 , x 2 , x 3 ) P ( x 2 ) = P ( x 1 ) P ( x 2 ∣ x 1 ) P ( x 3 ∣ x 2 ) P ( x 2 ) \frac{P(x_1,x_2,x_3)}{P(x_2)}=\frac{P(x_1)P(x_2|x_1)P(x_3|x_2)}{P(x_2)} P(x2)P(x1,x2,x3)=P(x2)P(x1)P(x2∣x1)P(x3∣x2)
P ( x 1 , x 3 ∣ x 2 ) = P ( x 1 ) P ( x 2 , x 1 ) P ( x 3 ∣ x 2 ) P ( x 2 ) P ( x 1 ) = P ( x 2 , x 1 ) P ( x 3 ∣ x 2 ) P ( x 2 ) = P ( x 1 ∣ x 2 ) P ( x 3 ∣ x 2 ) P(x_1,x_3|x_2)=\frac{P(x_1)P(x_2,x_1)P(x_3|x_2)}{P(x_2)P(x_1)}=\frac{P(x_2,x_1)P(x_3|x_2)}{P(x_2)}=P(x_1|x_2)P(x_3|x_2) P(x1,x3∣x2)=P(x2)P(x1)P(x1)P(x2,x1)P(x3∣x2)=P(x2)P(x2,x1)P(x3∣x2)=P(x1∣x2)P(x3∣x2),即 x 2 x_2 x2条件下, x 1 x_1 x1条件独立于 x 3 x_3 x3。
fork图得到 P ( x 1 , x 2 , x 3 ) = P ( x 2 ) P ( x 1 ∣ x 2 ) P ( x 3 ∣ x 2 ) P(x_1,x_2,x_3)=P(x_2)P(x_1|x_2)P(x_3|x_2) P(x1,x2,x3)=P(x2)P(x1∣x2)P(x3∣x2)(Bayesian network factorization)
两边同时除以 P ( x 2 ) P(x_2) P(x2): P ( x 1 , x 2 , x 3 ) P ( x 2 ) = P ( x 2 ) P ( x 1 ∣ x 2 ) P ( x 3 ∣ x 2 ) P ( x 2 ) \frac{P(x_1,x_2,x_3)}{P(x_2)}=\frac{P(x_2)P(x_1|x_2)P(x_3|x_2)}{P(x_2)} P(x2)P(x1,x2,x3)=P(x2)P(x2)P(x1∣x2)P(x3∣x2)
P ( x 1 , x 3 ∣ x 2 ) = P ( x 1 ∣ x 2 ) P ( x 3 ∣ x 2 ) P(x_1,x_3|x_2)=P(x_1|x_2)P(x_3|x_2) P(x1,x3∣x2)=P(x1∣x2)P(x3∣x2),即 x 2 x_2 x2条件下, x 1 x_1 x1条件独立于 x 3 x_3 x3。
collider
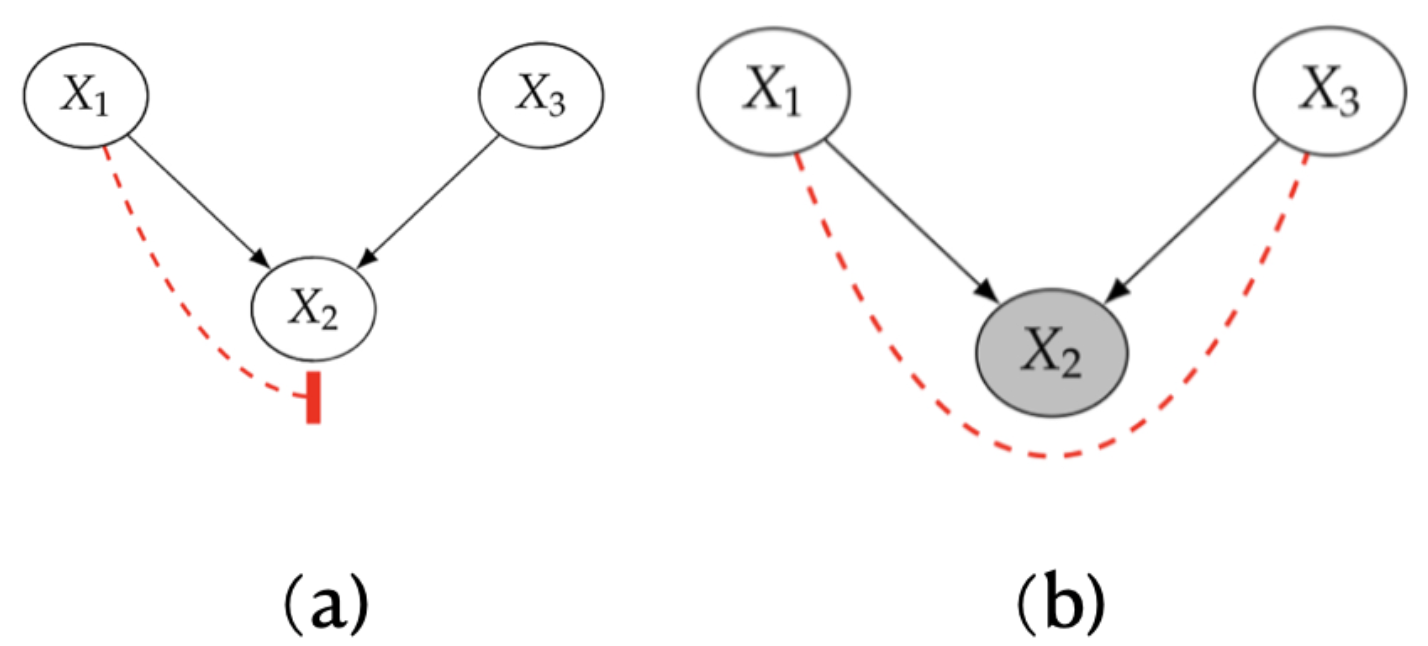
如图6a,collider(对撞结构)与前两种结构不同,collider中x1和x3没有关联关系,x1和x3的关联被x2 blocked了,证明如下:
P ( x 1 , x 3 ) = ∑ x 2 P ( x 1 , x 2 , x 3 ) = ∑ x 2 P ( x 1 ) P ( x 3 ) P ( x 2 ∣ x 1 , x 3 ) = P ( x 1 ) P ( x 3 ) ∑ x 2 P ( x 2 ∣ x 1 , x 3 ) = P ( x 1 ) P ( x 3 ) P(x_1,x_3)=\sum_{x_2}P(x_1,x_2,x_3)=\sum_{x_2}P(x_1)P(x_3)P(x_2|x_1,x_3)=P(x_1)P(x_3)\sum_{x_2}P(x_2|x_1,x_3)=P(x_1)P(x_3) P(x1,x3)=∑x2P(x1,x2,x3)=∑x2P(x1)P(x3)P(x2∣x1,x3)=P(x1)P(x3)∑x2P(x2∣x1,x3)=P(x1)P(x3)
如图6b,而当在x2条件下时,x1和x3反而建立起一种虚假的关联,x1和x3的关联被x2unblocked,证明:
P ( x 1 , x 2 , x 3 ) = P ( x 1 ) P ( x 3 ) P ( x 2 ∣ x 1 , x 3 ) P(x_1,x_2,x_3)=P(x_1)P(x_3)P(x_2|x_1,x_3) P(x1,x2,x3)=P(x1)P(x3)P(x2∣x1,x3)(Bayesian network factorization),
两边同时除以 P ( x 2 ) P(x_2) P(x2): P ( x 1 , x 3 ∣ x 2 ) = P ( x 1 ) P ( x 3 ) P ( x 2 ∣ x 1 , x 3 ) P ( x 2 ) P(x_1,x_3|x_2)=P(x_1)P(x_3)\frac{P(x_2|x_1,x_3)}{P(x_2)} P(x1,x3∣x2)=P(x1)P(x3)P(x2)P(x2∣x1,x3),可见在x2条件下,x1与x3不满足条件独立。
最后我们还可以根据collider的性质延伸出一种情况,如图7所示,如果我们condition on x2的子孙,也会产生虚假的关联,这个关联流向为x4->x2->(x1,x3)。

D-separation
现在我们对上面谈到的情况对点之间的关系进行总结,将几个点之间的关系拓展到整个图。
首先我们正式定义blocked概念。对于单条路径,如果:
- 路径中存在chain …->W->…或者fork…<-W->…结构, W ∈ Z W\in Z W∈Z
- 路径中存在collider …->W<-…, W ∉ Z W \notin Z W∈/Z且W的子孙 d e ( W ) ∉ Z de(W)\notin Z de(W)∈/Z
则称X和Y之间的这条路径被条件集Z blocked(阻断),条件集Z可以是空集。与之相对,unblocked路径便是不满足blocked条件的路径。
然后基于blocked,我们定义d-separation,如果:
两个顶点集合X和Y之间的路径全部被Z blocked,则称X和Y被Z d-separation。 如果二者之间存在unblocked路径,则称X和Y是d-connected。
再扩展到整个图的关系,首先我们定义一些符号:如果在Z条件下,X和Y在图G中是d-separation的,则 X ⊥ ⊥ G Y ∣ Z X {\perp \!\!\! \perp}_G Y|Z X⊥⊥GY∣Z;如果在Z条件下,X和Y在分布P中是条件独立的,则 X ⊥ ⊥ P Y ∣ Z X {\perp \!\!\! \perp}_P Y|Z X⊥⊥PY∣Z。
有了这些符号,我们定义global Markov assumption:
给定P关于G是马尔科夫的(满足local Markov assumption),如果在Z条件下,X和Y在G中是 d-separation 的,则在Z条件下,X和Y在分布P中是条件独立的,即:
X ⊥ ⊥ G Y ∣ Z = > X ⊥ ⊥ P Y ∣ Z X {\perp \!\!\! \perp}_G Y|Z =>X {\perp \!\!\! \perp}_P Y|Z X⊥⊥GY∣Z=>X⊥⊥PY∣Z
local Markov assumption,global Markov assumption 和 Bayesian network factorization是不同角度的理解,他们三者是完全等价的,可以将这三者统称为Markov assumption,或者说P关于G是马尔科夫的。