矢量控制中所用的坐标系有两种:一种是静止坐标系,一种是旋转坐标系。基于定子的三相绕组构成的三项定子abc坐标系和由固定在A轴上的α轴和与之垂直的β轴所组成的两相正交静止坐标系,与转子轴线重合的d轴及超前d轴90°的q轴组成的旋转坐标系。
目录
Clarke变换
三相定子坐标系abc与两相定子坐标系αβ之间的变换,称为Clarke变换,也叫3/2变换,如下图所示:
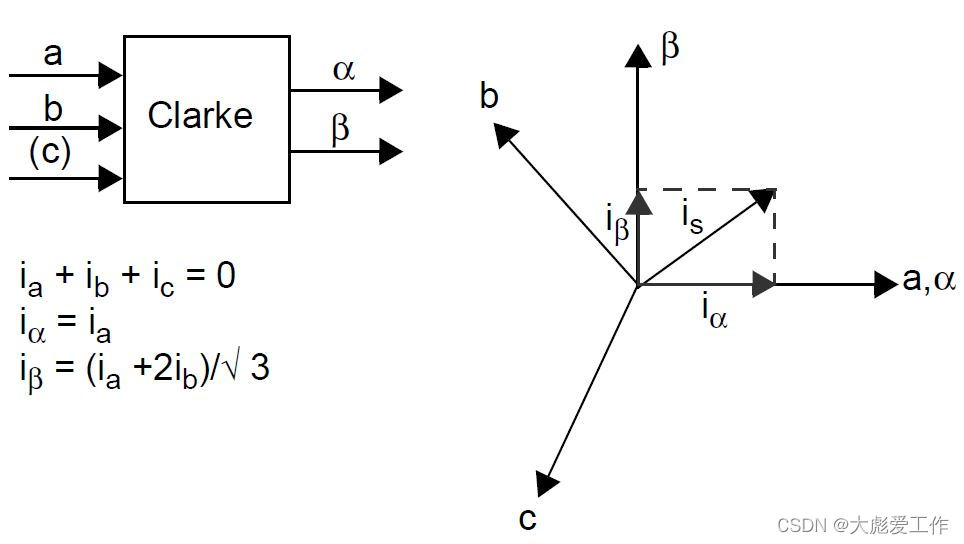
A相绕组轴线与α轴重合,β轴与α轴相互垂直,三相绕组坐标系abc与两相绕组坐标系αβ都是静止坐标,分别对应的交流电流为ia,ib,ic和iα,iβ。
设三相绕组每相有效匝数为N3,两相绕组每相有效匝数为N2,各相磁动势为有效匝数与电流的乘积,其空间矢量均位于对应相的坐标轴上。
设磁动势波形是正弦分布的,当三相总磁动势与两相总磁动势相等时,两套绕组瞬时磁动势在αβ轴上的投影都应相等。
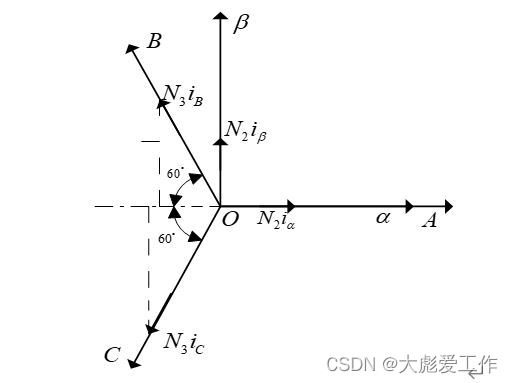
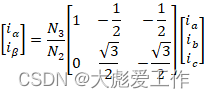
根据上图可得3/2变换关系式:


将上述两式写为矩阵形式:
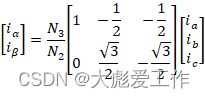
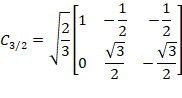
即3/2变换矩阵为:
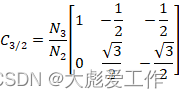
那么,N3/N2是多少呢?
坐标变换是一种线性变换,如无约束,变换就不是唯一的。在电机的系统分析中,通常采用两种原则作为坐标变换的约束条件:
(1)功率不变原则,即变换前后电机的功率保持不变;
(2)合成磁动势不变约束,即变换前后电机的合成磁动势保持不变。
功率不变约束
功率不变时坐标变换阵的性质:
原坐标下:
![]()
![]()
新坐标下:
![]()
![]()
设对应转换关系:

那么功率不变约束下:
![]()
即:
![]()
上式根据坐标系转换关系得:
![]()
所以:
![]()
一般情况下,电压和电流变换阵都取同一矩阵,即令:
![]()
则:
![]()
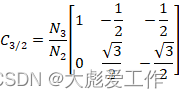
前面推导出3/2变换及匝数比如下:
3/2变换矩阵为:
那么
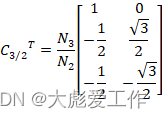
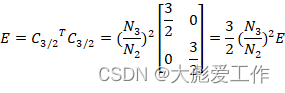
所以

即,在功率不变约束下,3/2变换矩阵为:

合成磁动势不变约束
将abc三相电流及αβ两相电流写成时域形式:

再根据3/2变换关系式:

考虑任何时刻变换前后等幅值,将wt=0代入,得:
即
![]()
即,在合成磁动势不变约束下,3/2变换矩阵为:

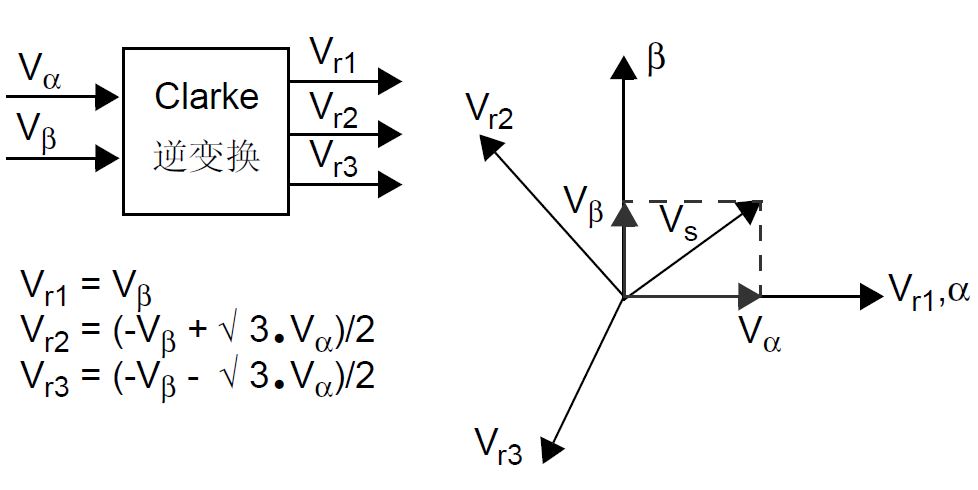
Clarke逆变换
将静止2轴α-β坐标系变换到静止3轴3相定子参考坐标系。从数学角度来看,该变换是通过Clarke逆变换来实现的。
Clarke逆变换示意图如下图所示。
考虑变换前后总功率不变,根据
得:

即:
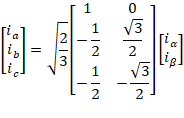
考虑变换前后幅值不变,根据

得:

即:

Park变换及其逆变换
现在,已使定子电流在一个两坐标轴分别标为α、β的2轴正交系中得以表达。下一步将其变换到另一个随着转子磁通旋转的2轴系统中。这种变换就是Park变换,其示意图如下图所示。该2轴旋转坐标系的坐标轴称为dq轴。θ表示转子角度。
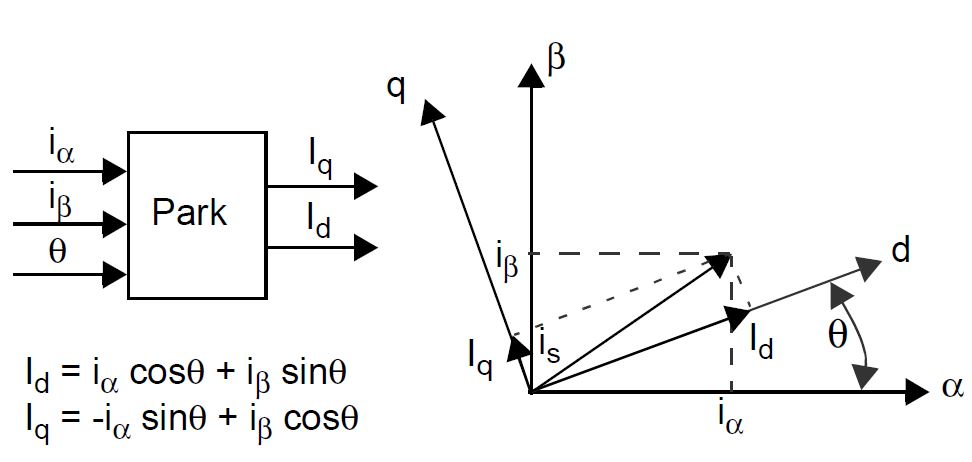
Park变换中,两个交流电流iα、iβ和两个直流电流id、iq,可以产生同样的以转速旋转得合成磁动势。
举例来说,如下图:
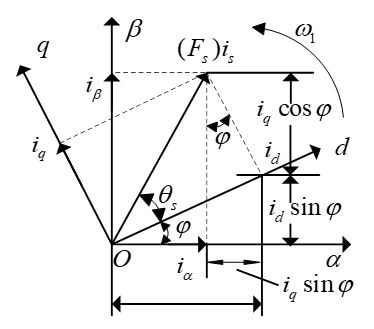
交流电流iα、iβ和两个直流电流id、iq,产生同样的以ω1速度旋转的合成磁动势Fs(is)。d轴q轴和矢量Fs(is)都是以ω1的速度旋转,分量id、iq的幅值不变。d轴与α轴的夹角φ随时间变化。
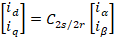
分析可得id、iq与iα、iβ之间存在如下关系:
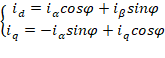
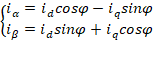
写成矩阵形式为:
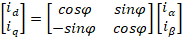
静止两相正交坐标系到旋转正交坐标系的变换矩阵,即Park变换矩阵为:
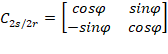
也就是
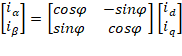
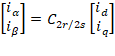
旋转正交坐标系到静止两相正交坐标系的变换矩阵,即Park逆变换矩阵为:
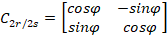
也就是:
同理,电压和磁链的旋转变换矩阵与电流的旋转变换矩阵是相同的。
小结
综上所述,结合矢量控制框图,Clarke变换和Park变换中各变量的关系见下图:
