关于齐次坐标:(15条消息) 为什么要引入齐次坐标,齐次坐标的意义(一)_追求卓越583的博客-CSDN博客_齐次坐标的意义
(15条消息) 为什么要引入齐次坐标,齐次坐标的意义(二)_追求卓越583的博客-CSDN博客_为什么要引入齐次坐标
Q1:如果我们在鼠标位置放一块白板 是否能work?
A1:不能work 因为胶片上的每一个像素收集到的是整个物体发出的光在这个像素上的聚合 所以它无法区分这个光是从物体的哪个部分发出来的 也就是说这个像素代表不了物体上的一个单元

如果在film前面放一个barrier 然后中间挖了一个孔 现在相机里叫光圈 物体会发出来很多光线 但只有很少的一部分能到达成像平面 所以如果经过aperture 到达film上的光线就把物体的不同位置分开了
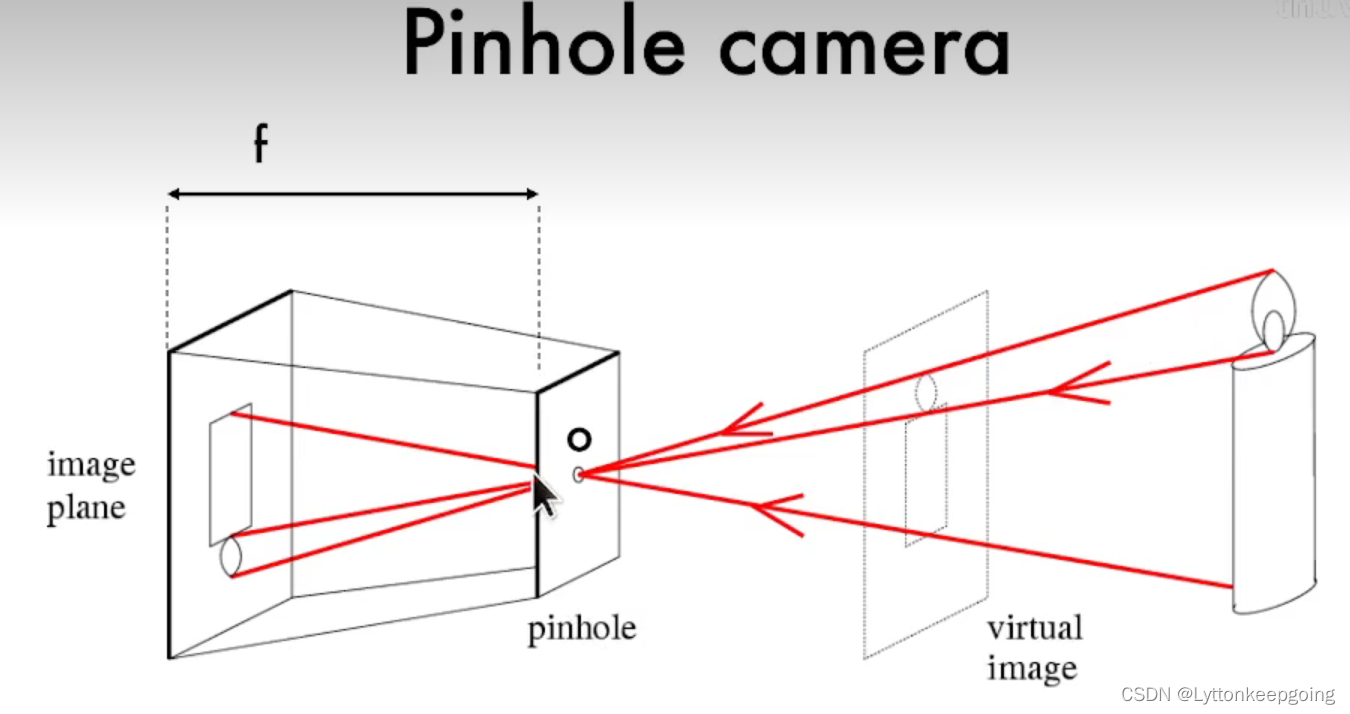
这就是一个基本的小孔模型
pinhole 到image plane的距离为焦距f = focal length
然后我们把它数学化抽象出来

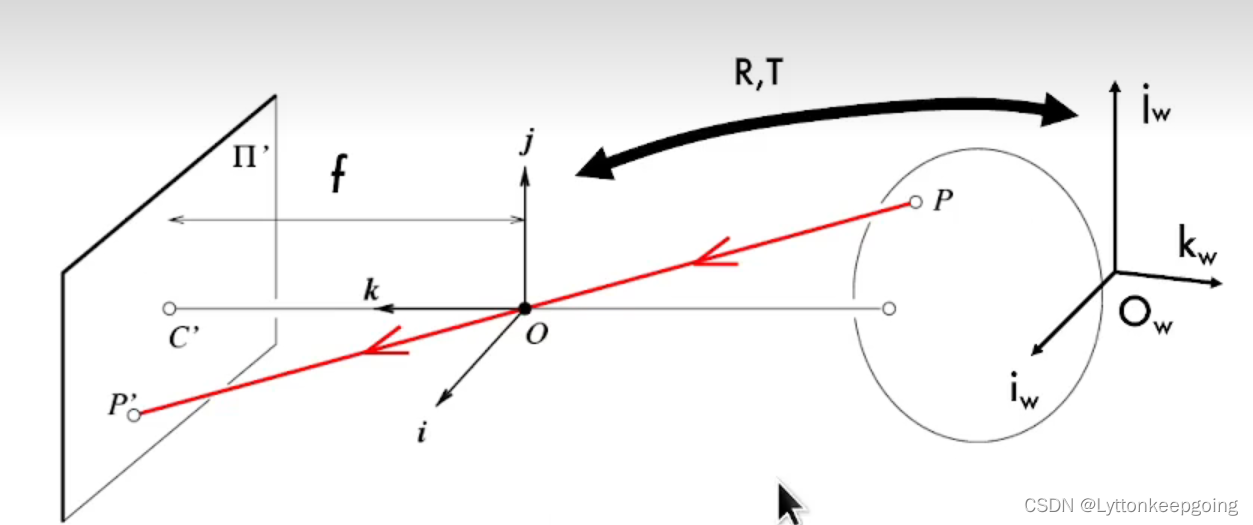
假设我们在三维空间中有一个点p 经过点o达到平面p‘上 相似三角形 能得到x‘ y'
注意坐标系 k方向一般代表图像深度方向 i和j方向 就是图像坐标系下的方向
Q2:
A2:当我们孔变大 透过这个孔的光变多了 就不再单点了 那么物体上的一个点在film上会有多个光斑 就会产生重影
理论上 pinhole越小 成像会越清楚 但是如果通过的光太少 会导致图像变暗 于是就有了透镜
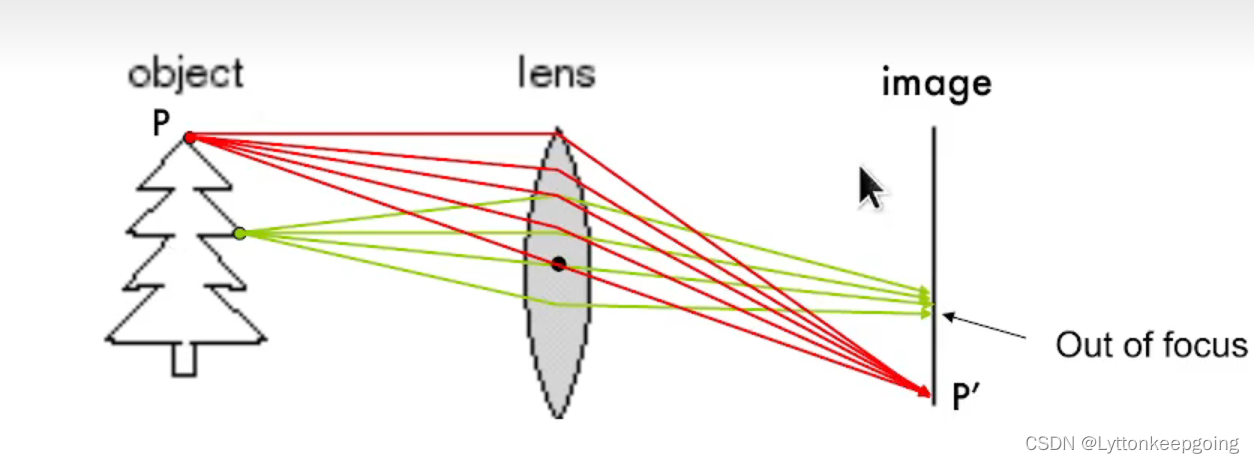
由于深度不一样 可能会出现out of focus的问题 也就是失焦 失焦的容差范围 为井深

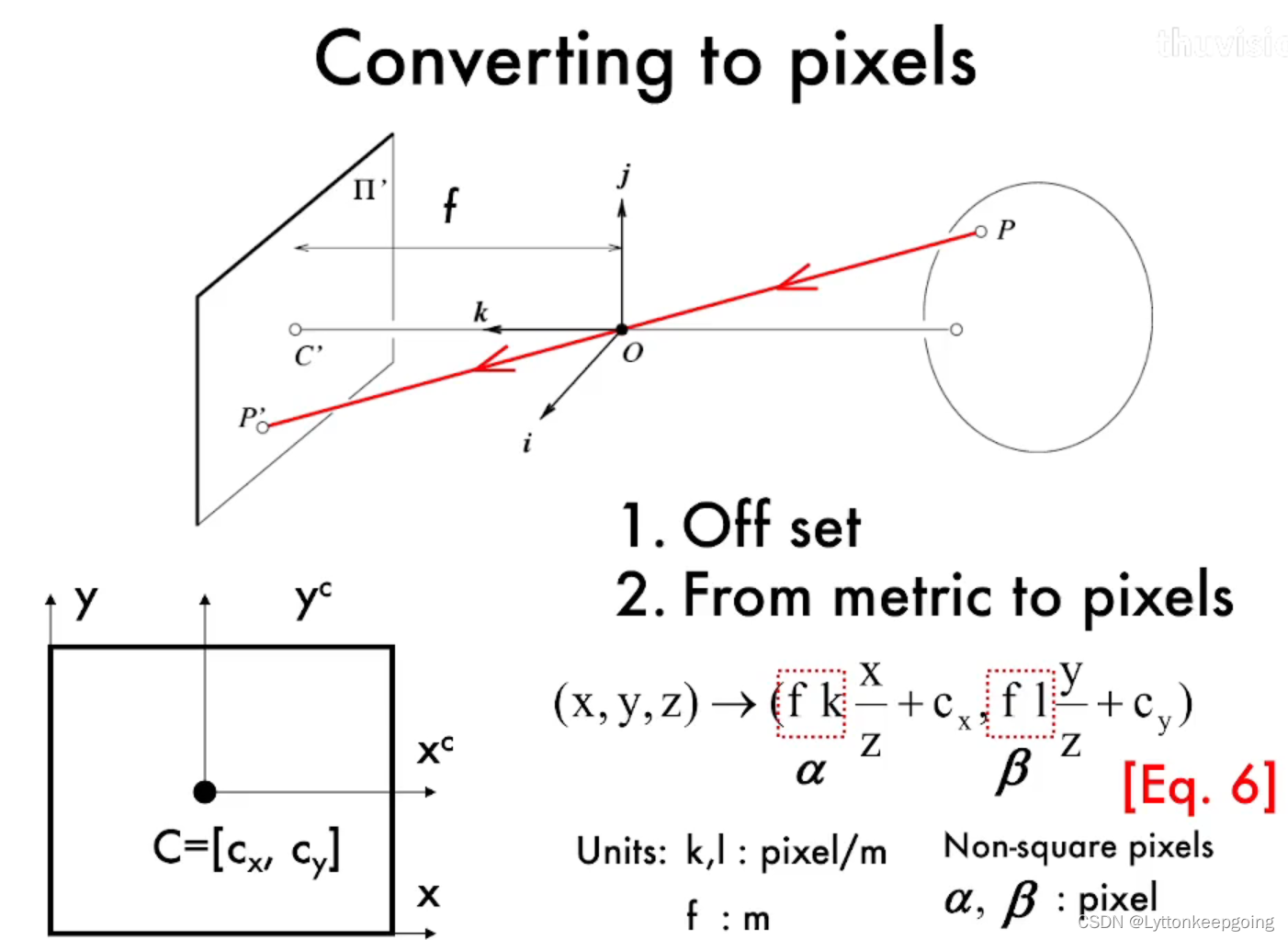
ijk是相机的三维坐标系 o平移到象上是C’ xy为图像坐标系 以图像左下角为原点 一般是以图像左上角为原点
怎么将这个式子由非线性变为线性?

于是就有了齐次坐标 Homogeneous coordinates

W是任意的 所以可以随意的在齐次坐标和摄影坐标之间转化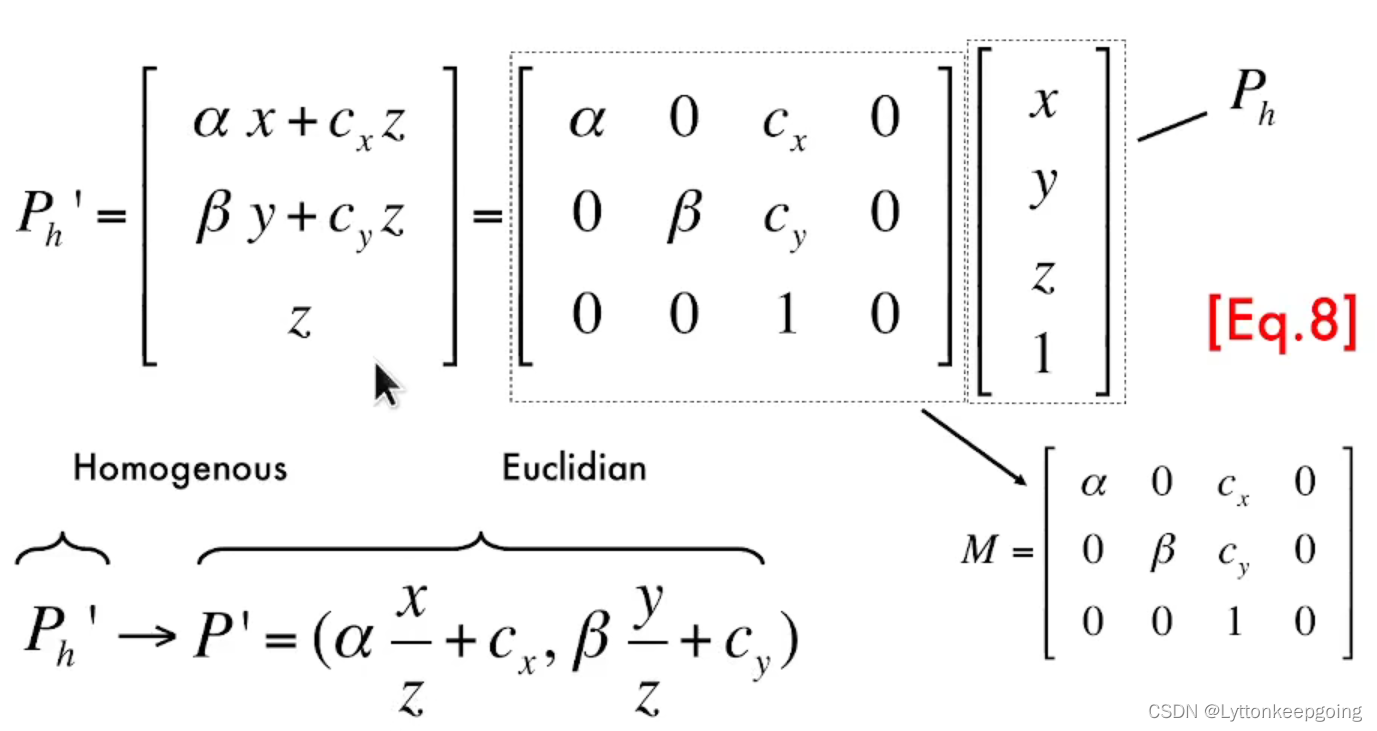
内参K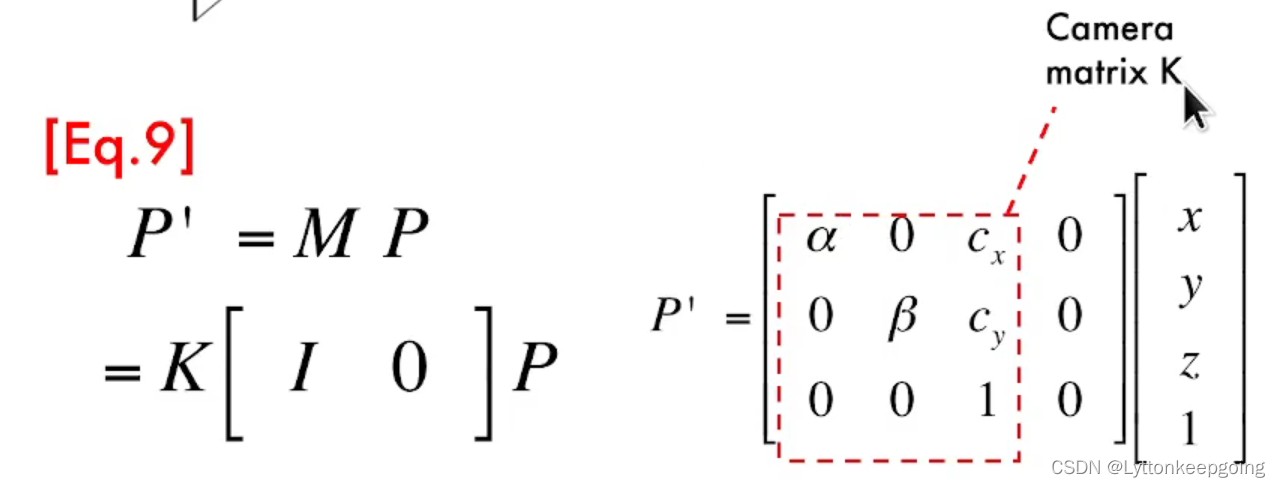
这个内参矩阵的自由度有多高?5个变量
然后说说外参
P怎么投影到C‘的
我们在计算的过程中一直都用的齐次坐标 (用齐次坐标是为了解决非线性问题)
所以我们在讨论下面所有的变换的时候都要从代数空间上升到齐次空间的讨论
齐次坐标系 它里面是一根根射线 他里面每一根射线的scale不重要 最终都会被唯一的对应到非齐次坐标系下的那个点
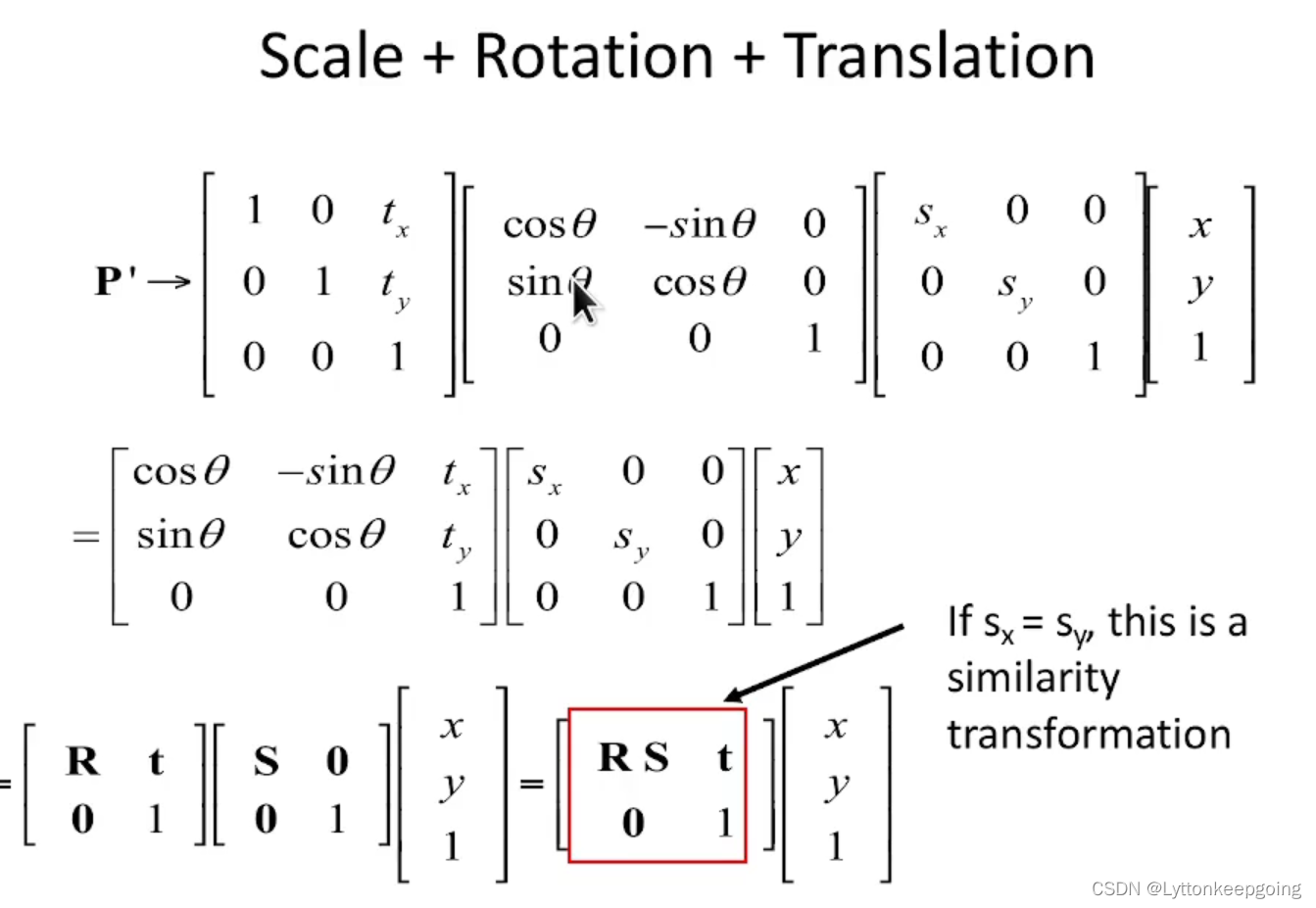
平移 放缩 旋转 就这三个动作
 一个点 先放缩 sx sy
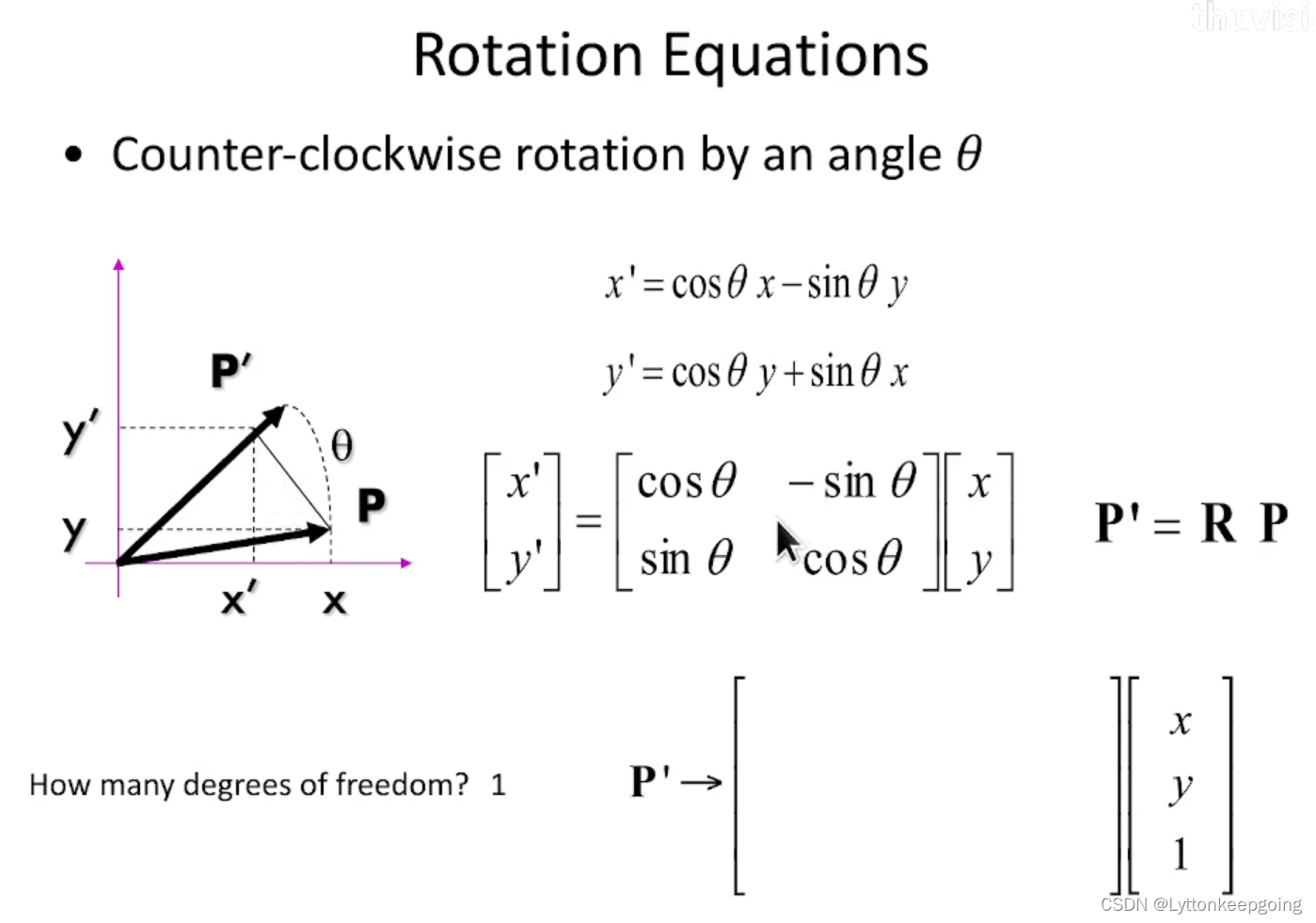
一个点 先放缩 sx sy  然后旋转seta角度
然后旋转seta角度 再平移tx ty
再平移tx ty 矩阵连乘的物理意义就是欧式空间的连续动作
矩阵连乘的物理意义就是欧式空间的连续动作
最终写成这样的矩阵形式
 三维旋转
三维旋转
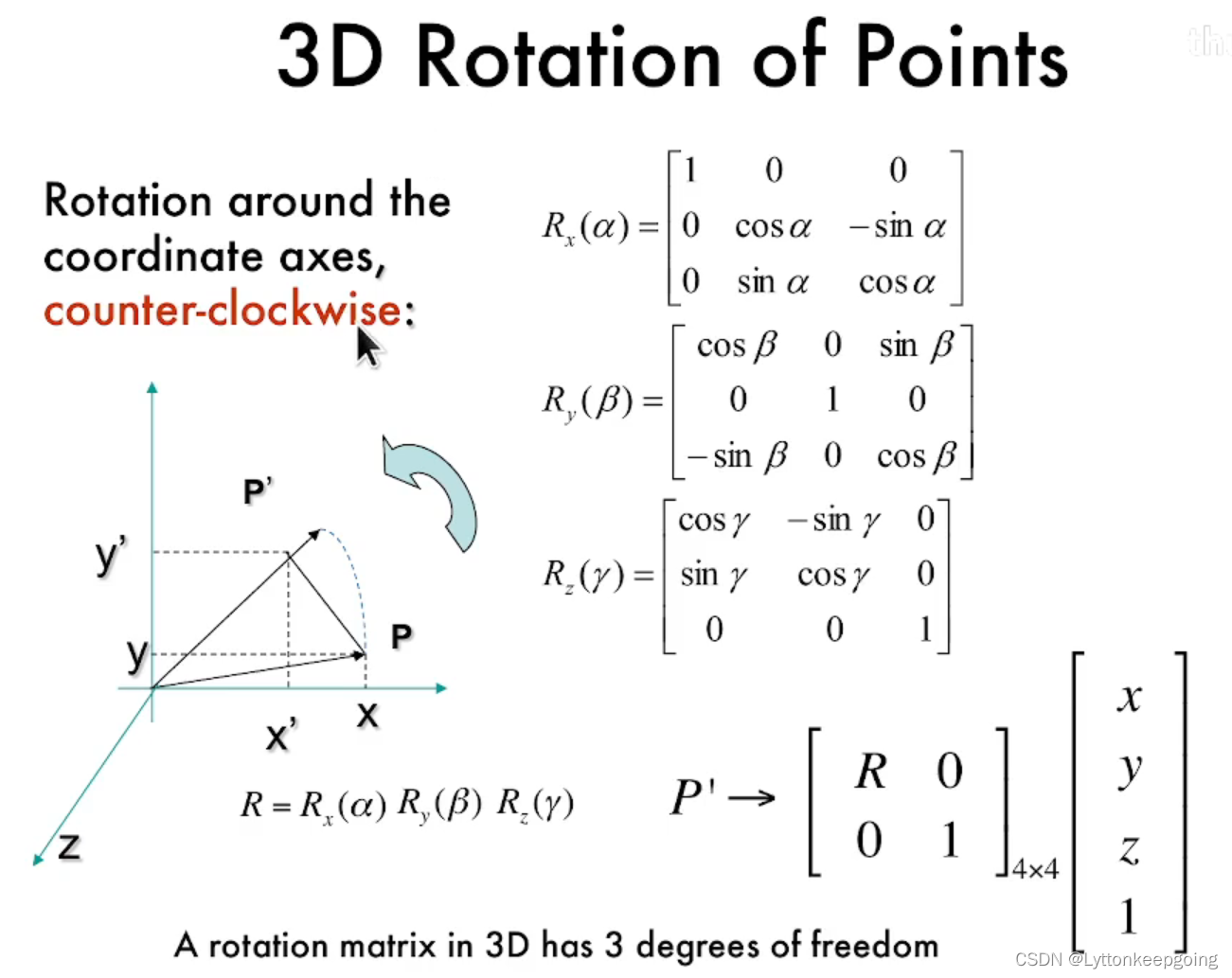
假设所有的旋转矩阵是一个集合 任何一个旋转矩阵都可以分解为围绕三个轴的旋转矩阵的连乘
所以最最关键的就是这个欧式空间的变换矩阵

那么我们回到最初的问题
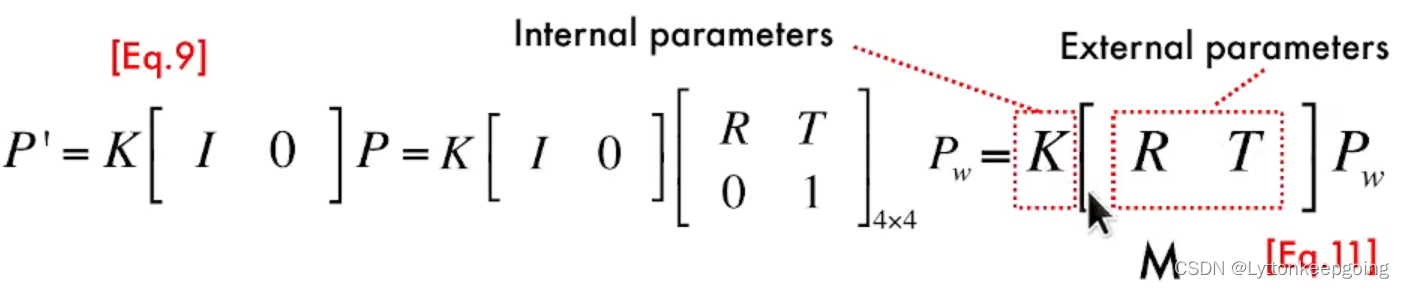
K内参矩阵 是一个三角矩阵 R是一个旋转矩阵 正交矩阵 T是一个三维的平移向量 Pw是三维坐标系下的一个点 是4X1的一个齐次坐标