这是一篇ICLR2023 top 5%论文
论文链接:https://openreview.net/pdf?id=vSVLM2j9eie
代码:https://github.com/Thinklab-SJTU/Crossformer
1. Multivariate Time Series Forecasting
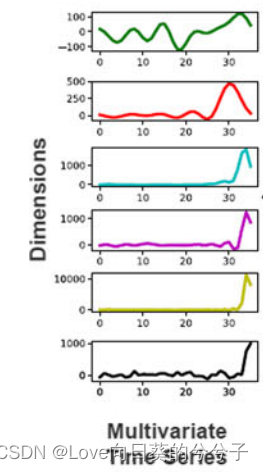
MTS,多变量时序数据预测。利用MTS的历史值可以预测其未来的趋势,例如心电图(ECG),脑电图(EEG)脑磁图(MEG)的诊断以及系统监测等等都是固有的多变量问题。该任务数据每个实例序列拥有多个维度,是一个d维向量和m个观测值(时间序列)的列表,如下所示数据(借鉴自综述论文:《The great multivariate time series classification bake off: a review and experimental evaluation of recent algorithmic advances》)
2. 动机
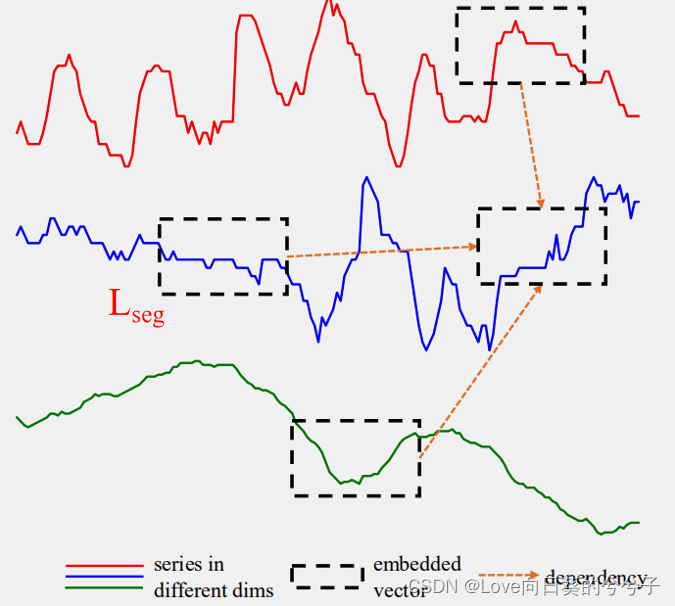
MTS的核心额外复杂性在于,区别性特征可能存在于维度之间的相互作用中,而不仅仅存在于单个序列中的自相关性中。标准的Transformer中核心self-attention可能仅仅建模了单个序列的自相关性,忽略了跨维度的依赖关系。
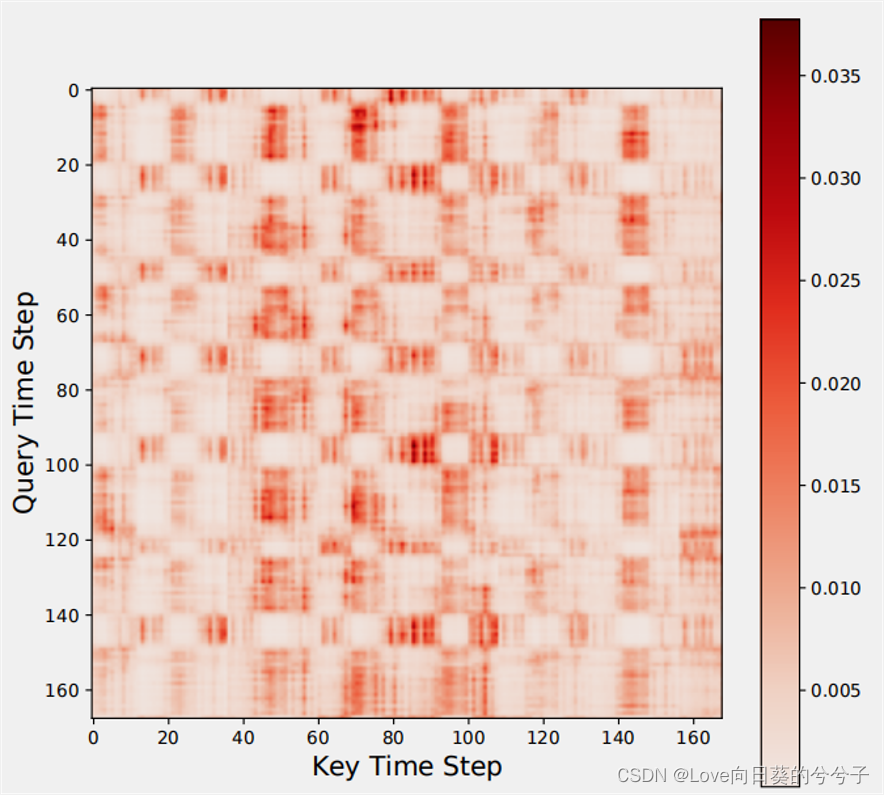
此外,如下图所示,当数据序列很长时,计算复杂性高,但是可以观察到,接近的数据点具有相似的注意权重!
基于此,作者提出一个分层encoder-decoder框架Crossformer.
3. Crossformer
目标:输入一段历史序列 x 1 : T ∈ R T × D x_{1:T} \in \mathbb{R}^{T\times D} x1:T∈RT×D,预测未来的一段序列 x T + 1 : T + τ ∈ R τ × D x_{T+1:T+\tau} \in \mathbb{R}^{\tau \times D} xT+1:T+τ∈Rτ×D.
3.1 Hierarchical Encoder-Decoder
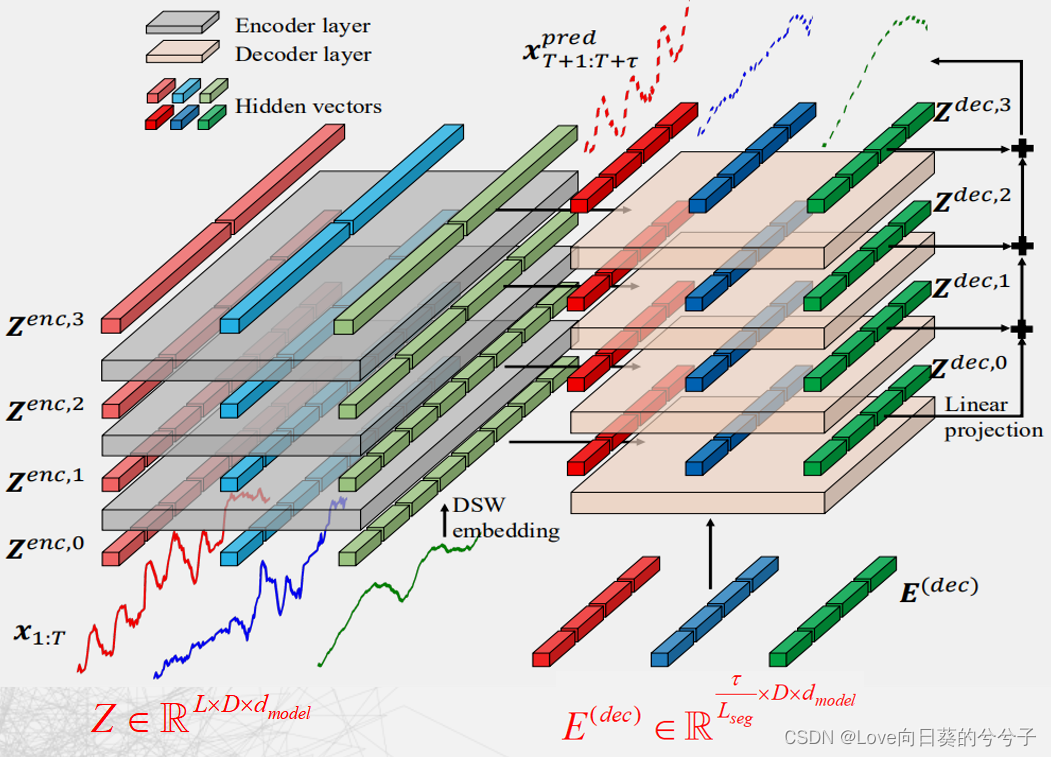
作者提出一个新的层次Encoder-Decoder的架构,如下所示,由左边encoder(灰色)和右边decoder(浅橘色)组成。其主要包含Dimension-Segment-Wise (DSW) embedding,Two-Stage Attention (TSA)层和Linear Projection。
- Dimension-Segment-Wise (DSW) embedding:为了将输入 x 1 : T ∈ R T × D x_{1:T} \in \mathbb{R}^{T\times D} x1:T∈RT×D进行分segment,从而减少计算复杂性。如果最后每个序列要分成 L L L个segment,每个序列 d m o d e l d_{model} dmodel的通道数,则最后的输入记为: Z ∈ R L × D × d m o d e l Z \in \mathbb{R}^{L \times D \times d_{model}} Z∈RL×D×dmodel.
- Two-Stage Attention (TSA)层:捕获cross-time和cross-dimension依赖关系。替待原来的self-attention在encoder和decoder中的位置。
- Linear Projection:应用于每一个decoder层的输出,以产生该层的预测。对各层预测结果进行求和,得到最终预测结果 x T + 1 : T + τ p r e d x^{pred}_{T+1:T+\tau} xT+1:T+τpred.
下面主要讲解DSW和TSA如何实现的!
3.2 Dimension-Segment-Wise embedding (DSW)
输入 x 1 : T ∈ R T × D x_{1:T} \in \mathbb{R}^{T\times D} x1:T∈RT×D,表明输入包含 T T T个序列,每个序列有 D D D个维度。如下所示,如果我们分的每个segment的长度为 L s e g L_{seg} Lseg,则每个序列中可以划分出 T L s e g \frac{T}{L_{seg}} LsegT个segment,每个序列有 D D D个维度,则整个输入共包含 T L s e g × D \frac{T}{L_{seg}} \times D LsegT×D个segment,故 x 1 : T x_{1:T} x1:T可以记为: x 1 : T = { x i , d ( s ) ∣ 1 ≤ i ≤ T L s e g , 1 ≤ d ≤ D } x_{1:T}=\{x^{(s)}_{i,d}|1\le i \le \frac{T}{L_{seg}}, 1 \le d \le D \} x1:T={
xi,d(s)∣1≤i≤LsegT,1≤d≤D}。在 d d d维度中的第 i i i个segment的size记为 x i , d ( s ) ∈ R 1 × L s e g x^{(s)}_{i,d} \in \mathbb{R}^{1 \times L_{seg}} xi,d(s)∈R1×Lseg,然后使用线性投影和位置嵌入将每个段嵌入到一个向量中:
其中 h i , d ∈ R d m o d e l h_{i,d} \in \mathbb{R}^{d_{model}} hi,d∈Rdmodel, E ∈ R d m o d e l × L s e g E \in \mathbb{R}^{d_{model} \times L_{seg}} E∈Rdmodel×Lseg表示可学习的映射矩阵。 E i , d ( p o s ) ∈ R d m o d e l E^{(pos)}_{i,d} \in \mathbb{R}^{d_{model}} Ei,d(pos)∈Rdmodel表示在 ( i , d ) (i,d) (i,d)位置的可学习位置嵌入。
最后,可以获得一个2D的向量数组 H = { h i , d ∣ 1 ≤ i ≤ T L s e g , 1 ≤ d ≤ D } ∈ R T L s e g × D × d m o d e l H=\{ h_{i,d}|1 \le i \le \frac{T}{L_{seg}},1 \le d \le D \} \in \mathbb{R}^{\frac{T}{L_{seg}} \times D \times d_{model}} H={
hi,d∣1≤i≤LsegT,1≤d≤D}∈RLsegT×D×dmodel.
3.3 Two-Stage Attention (TSA)
由上可得输入现在为: H ∈ R T L s e g × D × d m o d e l H \in \mathbb{R}^{\frac{T}{L_{seg}} \times D \times d_{model}} H∈RLsegT×D×dmodel,为了方便,记 L = T L s e g L=\frac{T}{L_{seg}} L=LsegT,则输入为 H ∈ R L × D × d m o d e l H \in \mathbb{R}^{L \times D \times d_{model}} H∈RL×D×dmodel。TSA主要由cross-time stage和
cross-dimension stage组成,如下图所示。
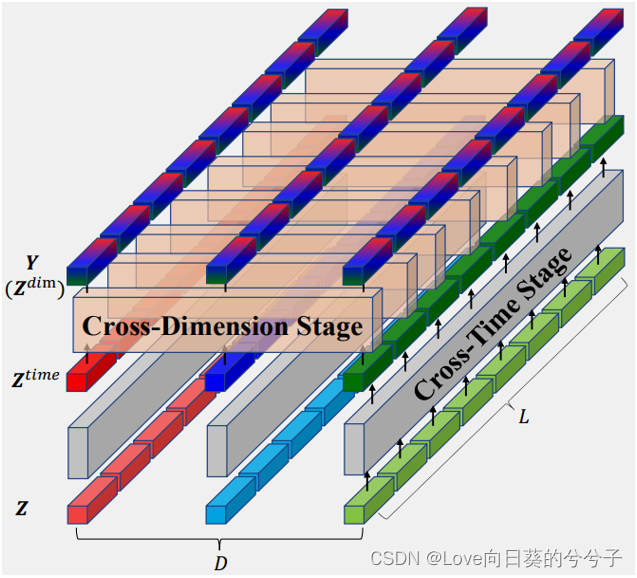
- Cross-Time Stage
对于每个维度,包含所有时间序列。因此,对于 d d d维度 Z : , d ∈ R L × d m o d e l Z_{:,d} \in \mathbb{R}^{L \times d_{model}} Z:,d∈RL×dmodel上,cross-time依赖关系可记为:

其中 1 ≤ d ≤ D 1 \le d \le D 1≤d≤D,所有维度共享MSA(multi-head self-attention). - Cross-Dimension Stage
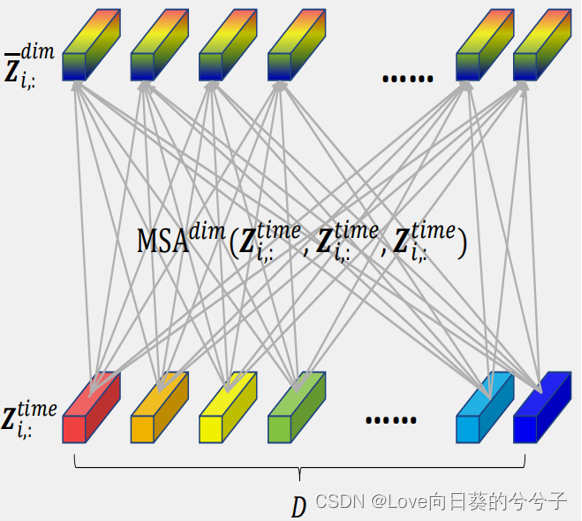
对于每个时间点,包含所有维度。因此,对于第 i i i时间点 Z i , : t i m e ∈ R D × d m o d e l Z^{time}_{i,:} \in \mathbb{R}^{D \times d_{model}} Zi,:time∈RD×dmodel
1)如果使用标准Transformer进行,如下图所示,可以很容易得到复杂性为 O ( D 2 ) \mathcal{O}(D^2) O(D2)!总共有 L L L个时间segment,因此总复杂性为 O ( D 2 L ) \mathcal{O}(D^2L) O(D2L).
2)作者引入router机制,每个时间点共享。如下图所示, R i , : ∈ R c × d m o d e l R_{i,:} \in \mathbb{R}^{c×d_{model}} Ri,:∈Rc×dmodel ( c c c是常数)是作为路由器的可学习向量,作为第一个MSA的query.
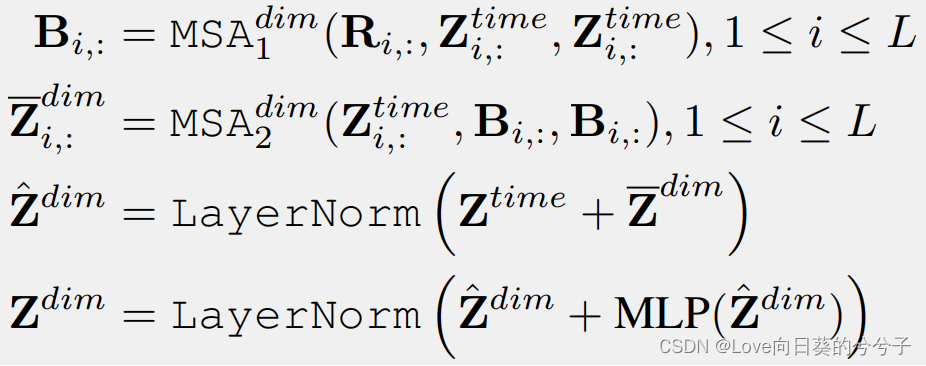
B i , : ∈ R c × d m o d e l B_{i,:} \in \mathbb{R}^{c×d_{model}} Bi,:∈Rc×dmodel,作为第二个MSA的key和value.
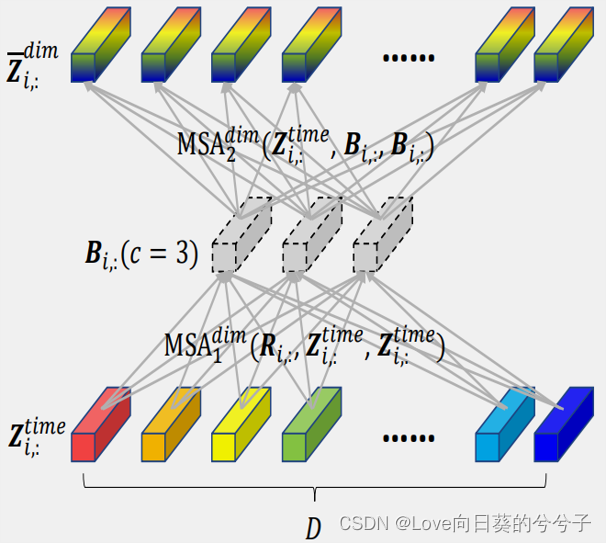
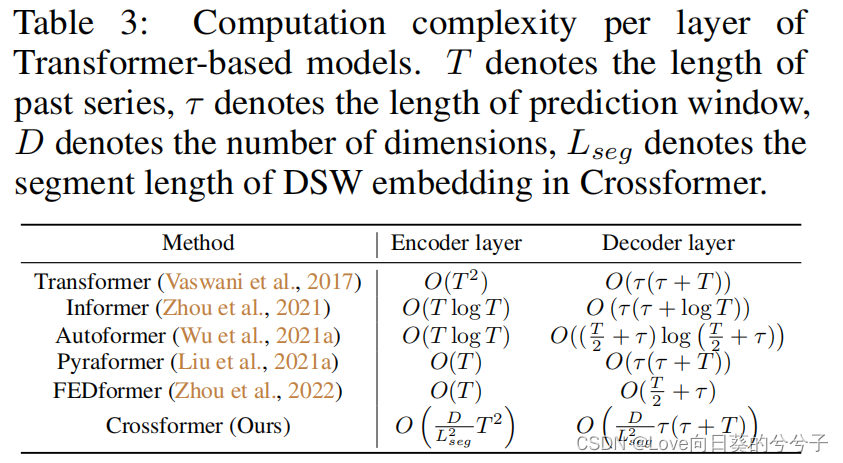
由上可知,第一个MSA复杂性为 O ( c D L ) \mathcal{O}(cDL) O(cDL),第二个MSA也是如此,因此,最终复杂性为 O ( 2 c D L ) \mathcal{O}(2cDL) O(2cDL),其中 2 c 2c 2c为常量,记复杂性变为 O ( D L ) \mathcal{O}(DL) O(DL)!!
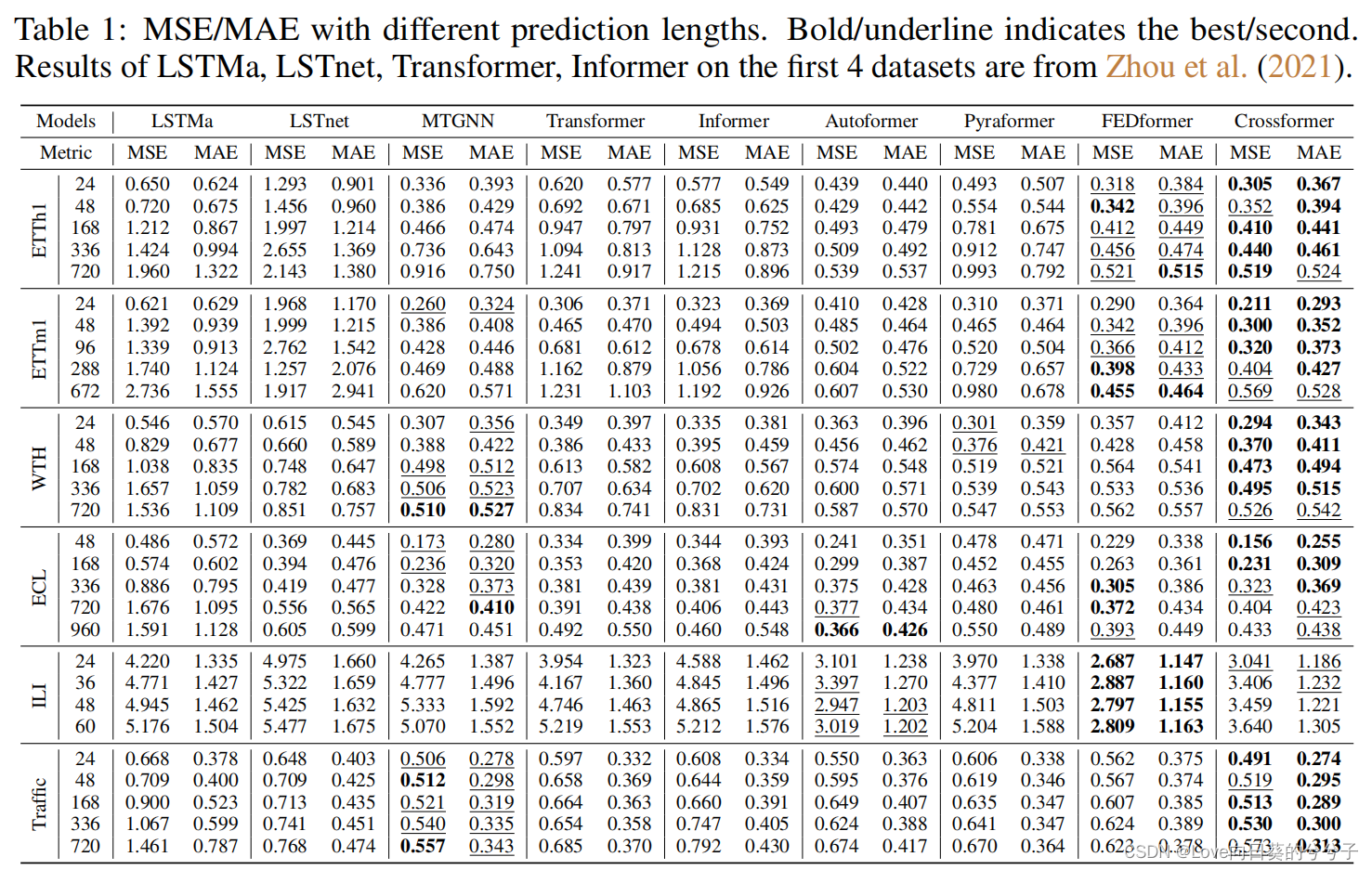
4 实验
-
SOTA方法对比
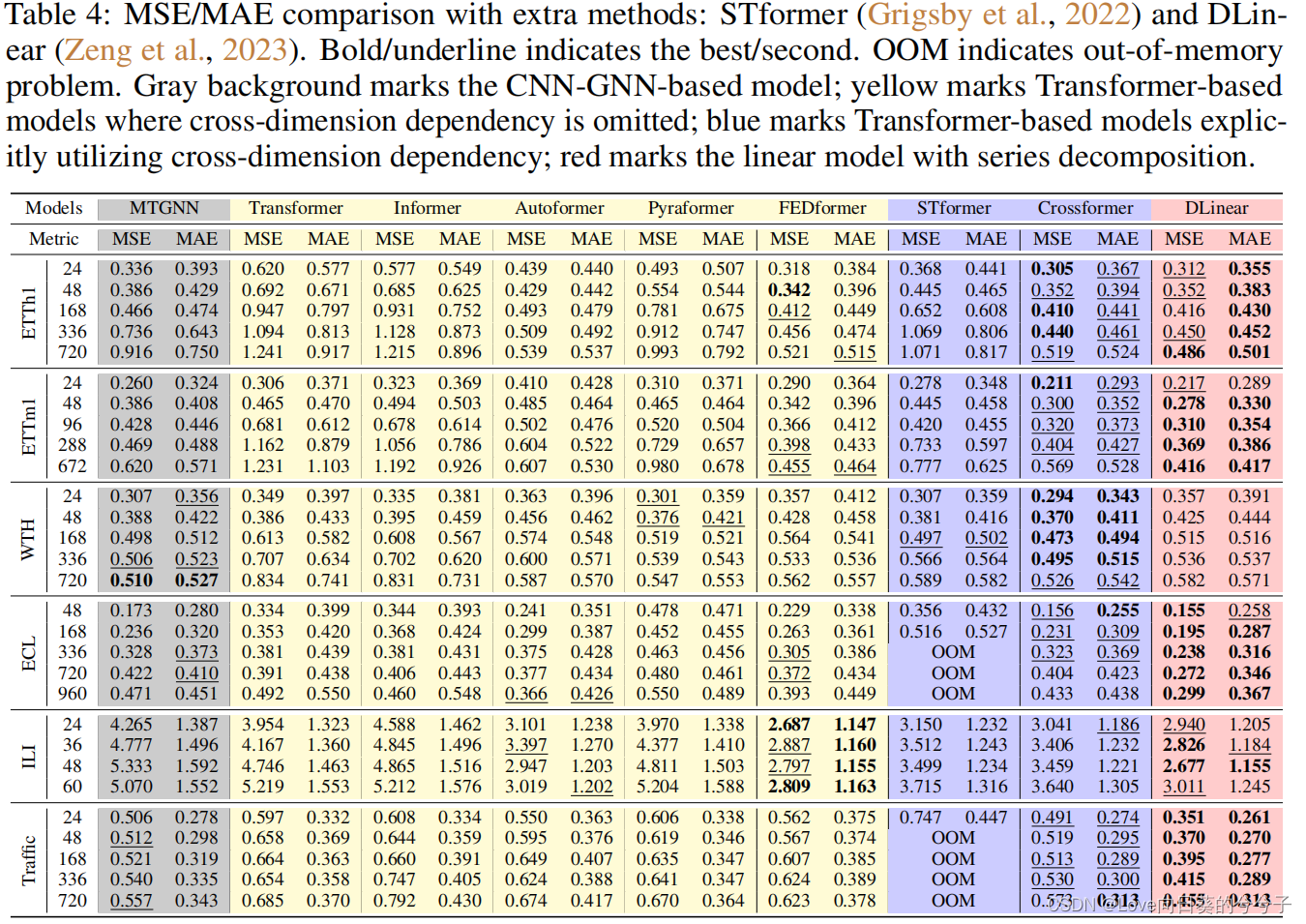
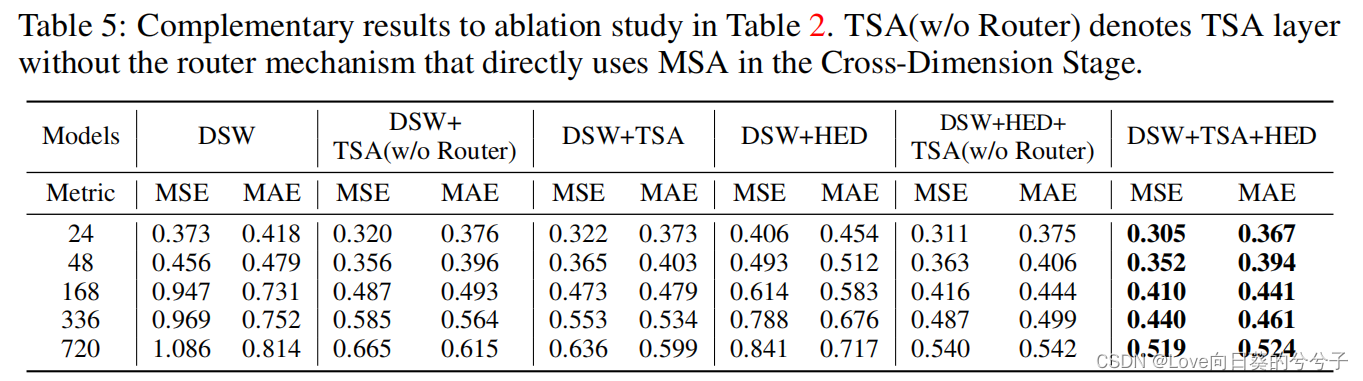
更多对比方法:
-
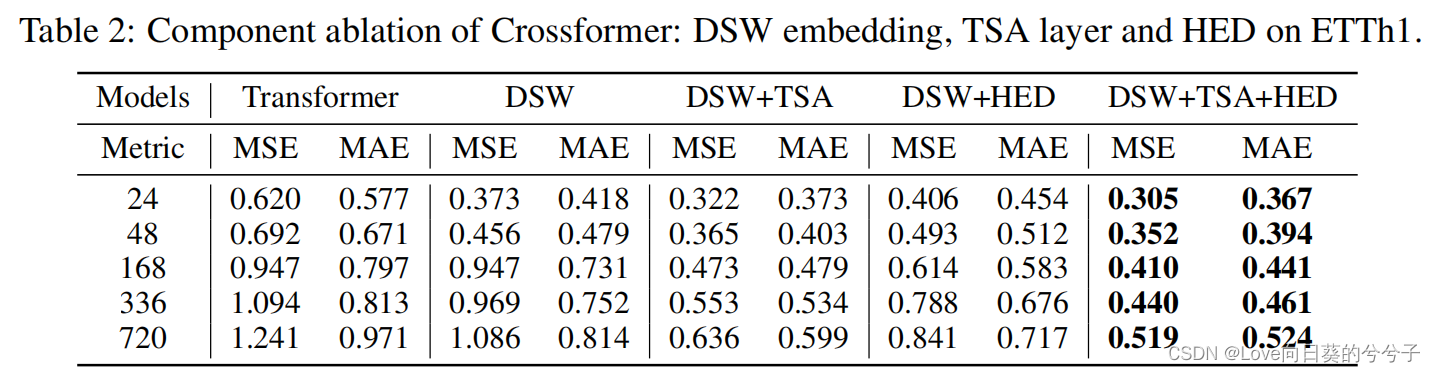
消融实验
-
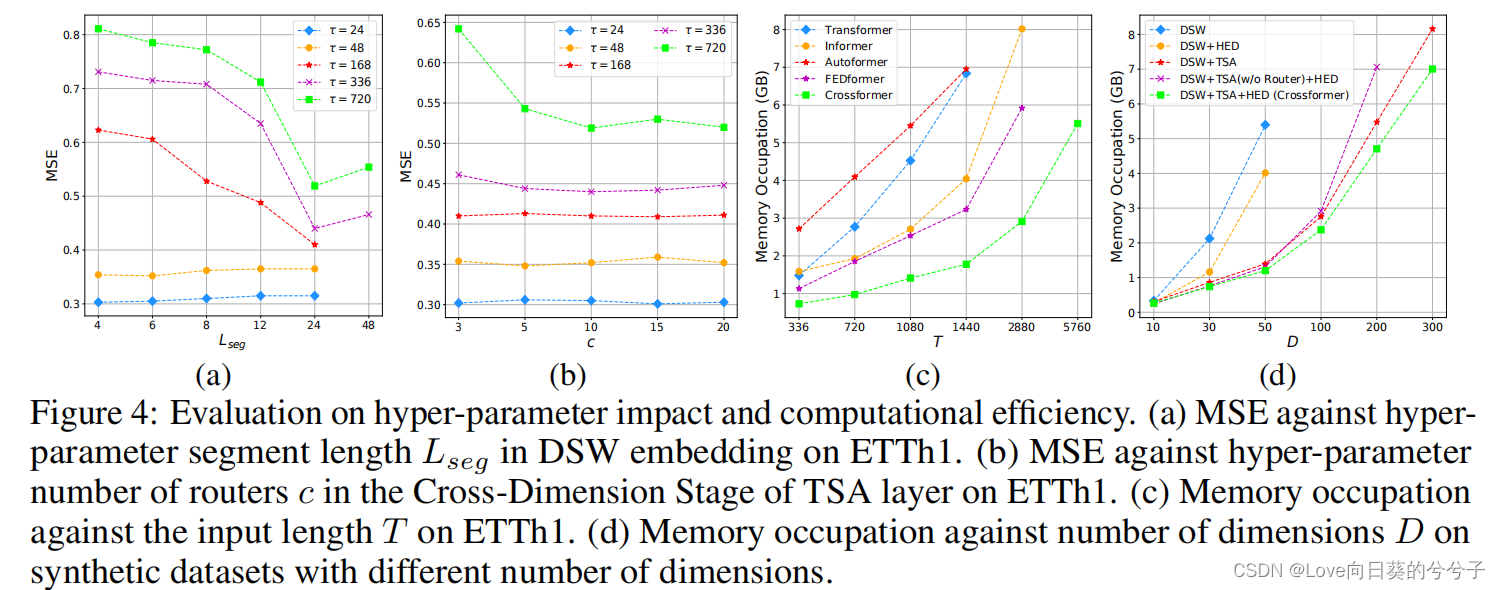
参数分析
-
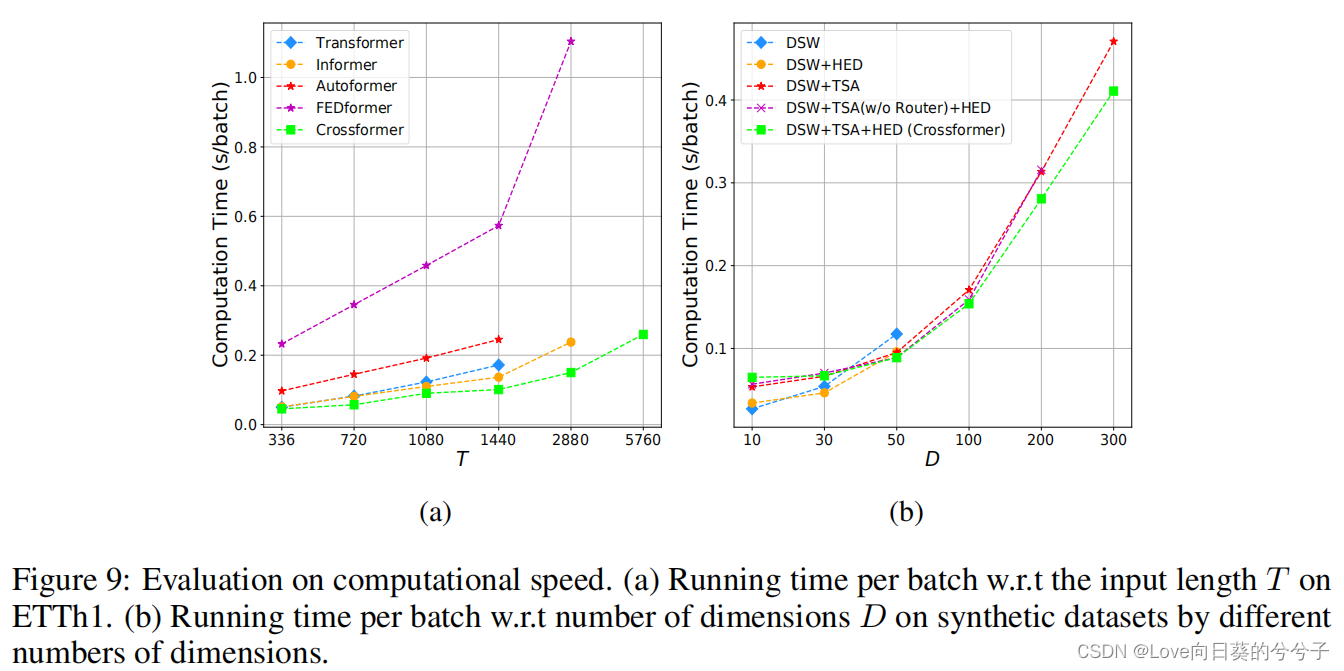
复杂性分析
-
可视化
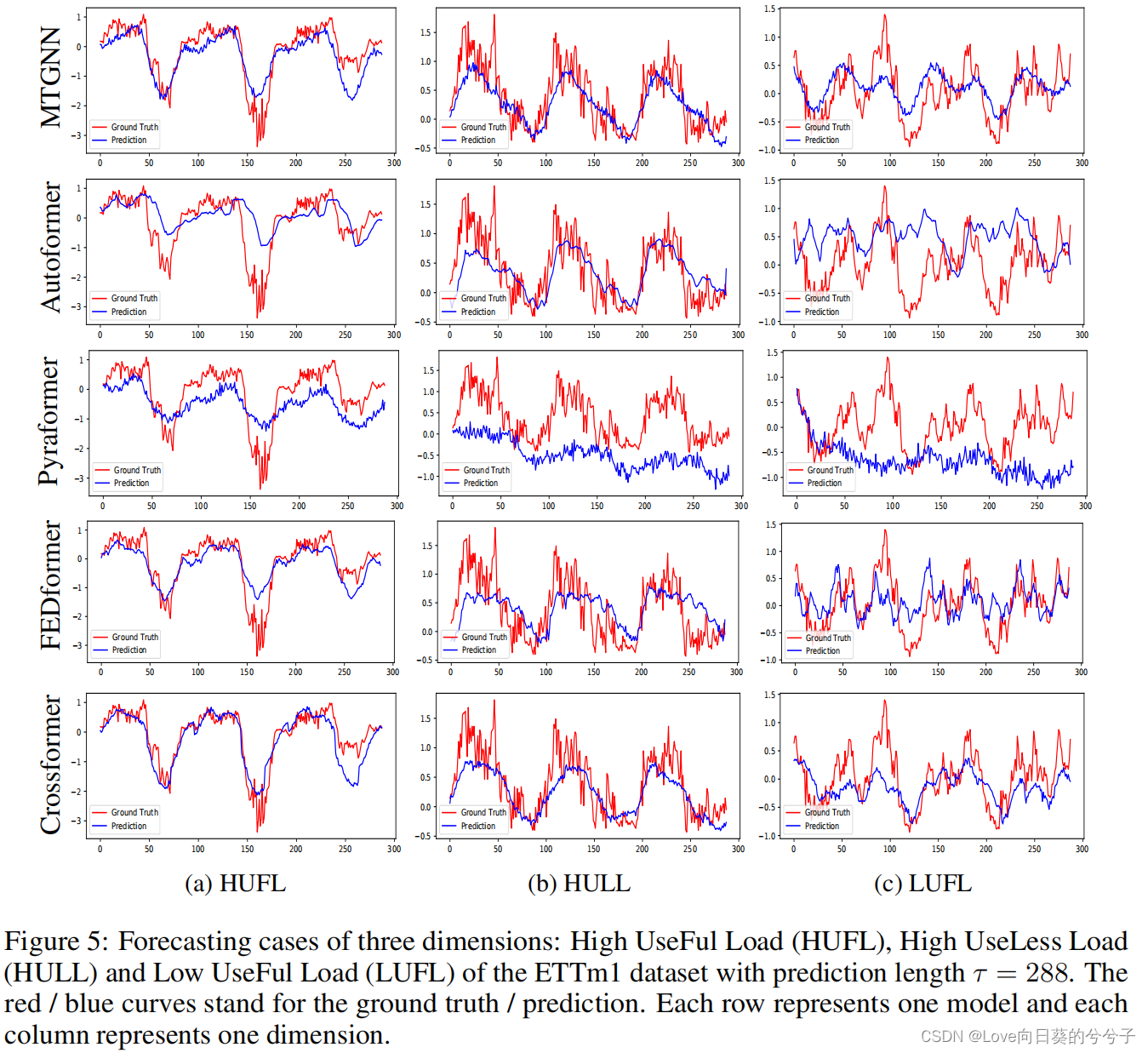
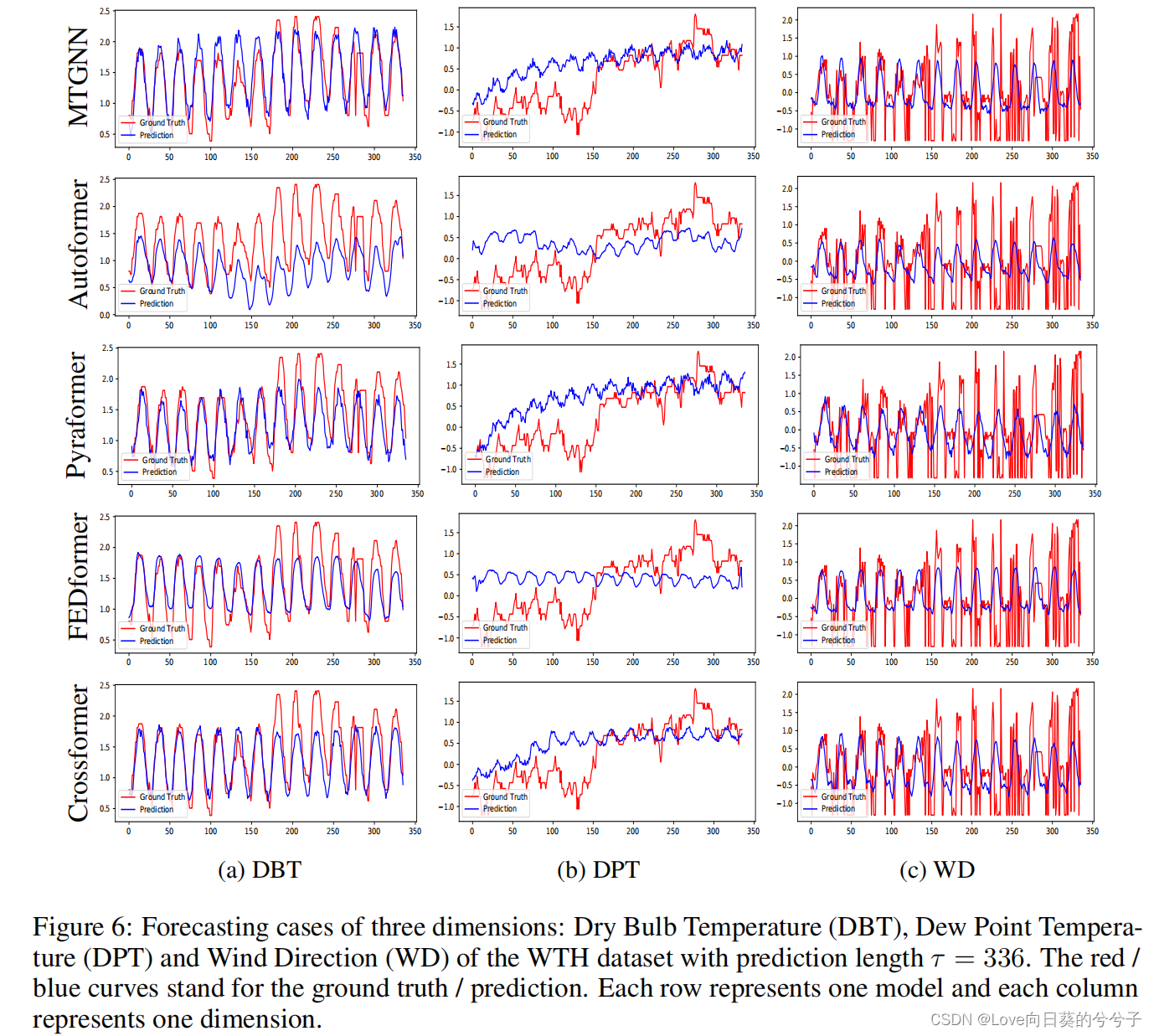
-
运行速度对比
5. 结论
- 提出了Crossformer,一种基于transformer的模型,利用跨维度依赖进行多元时间序列(MTS)预测。
- DSW (dimension - segment - wise)嵌入:将输入数据嵌入到二维矢量数组中,以保留时间和维度信息。
- 为了捕获嵌入式阵列的跨时间和跨维度依赖关系,设计两阶段注意(TSA)层。
- 利用DSW嵌入和TSA层,设计了一种分层编码器(HED)来利用不同尺度的信息。
在6个数据集上的实验结果展示了该方法优于之前的先进技术。
以上仅为本人小记,有问题欢迎指出(●ˇ∀ˇ●)