前言
在ART虚拟机实现中,内存分配和释放的算法是封装在不同的Space中来完成的。而外部使用者只能借助Space及派生类的接口来完成内存的分配与释放。通过阅读这些Space的实现,可以看出ART虚拟机的一个重要的特点就是大量使用映射内存,相较于Dalvik虚拟机来说在内存分配上管理的更细致。
ART虚拟机提供了多种内存分配手段,它们分别由LargeObjectSpace、BumpPointerSpace、ZygoteSpace、RegionSpace、DlMallocSpace和RosAllocSpace六个类来实现,虚拟机内部会根据配置情况来使用不同的内存分配类,本文来仔细。
概览
art/runtime/gc/space/space.h
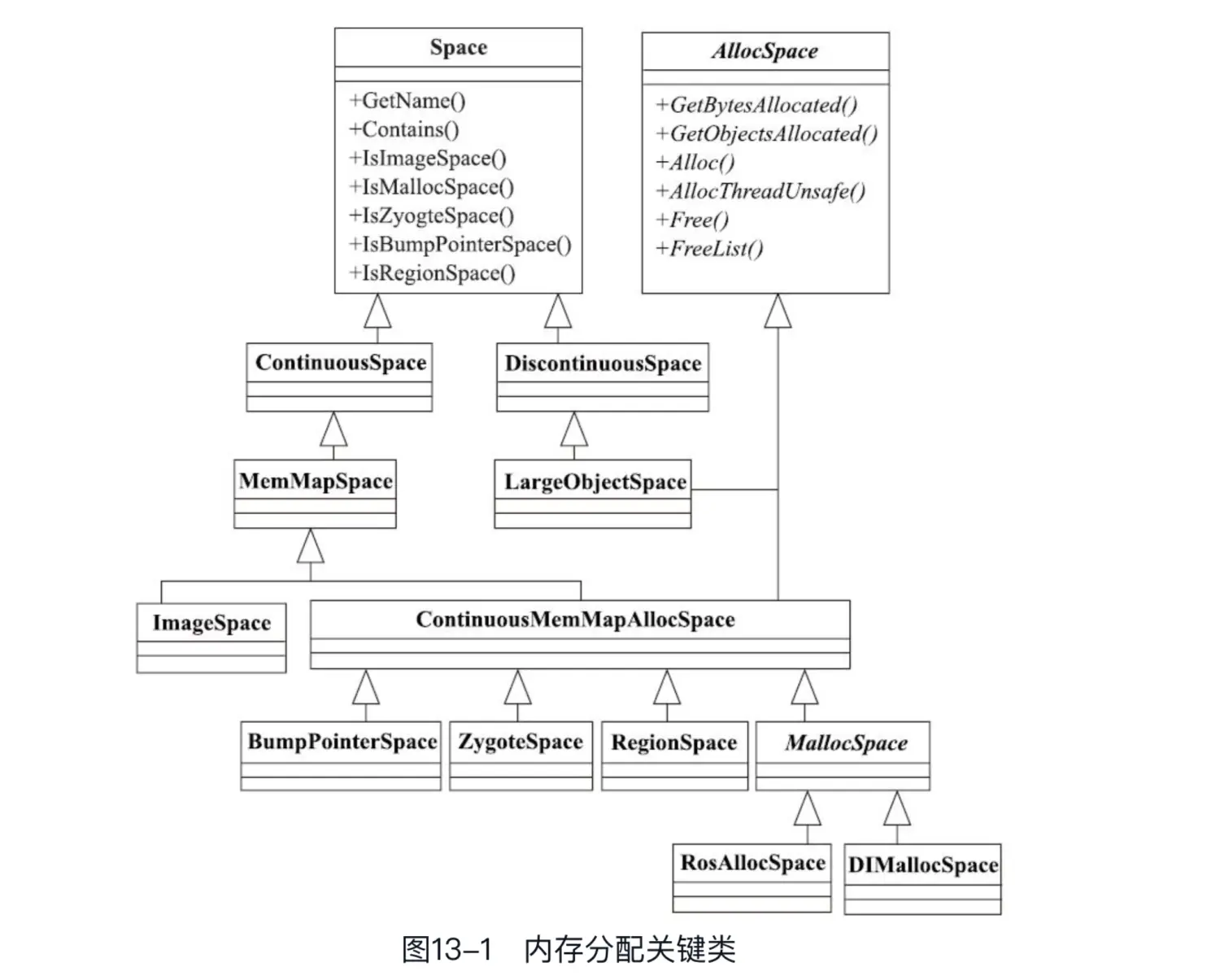
- 第一层包含Space和AllocSpace两个类。
Space代表一块内存空间,而纯虚类AllocSpace则代表一块可用于内存分配的空间。
AllocSpace提供了和内存分配及释放有关的虚函数,比如Alloc、Free等。 - 第二层包含ContinuousSpace和DiscontinuousSpace两个类。它们均派生自Space类。
ContinuousSpace表示一块地址连续的内存空间,
DiscontinuousSpace则表示一块地址不连续的空间。 - 第三层包含MemMapSpace和LargeObjectSpace两个类。
MemMapSpace派生自ContinuousSpace,它表示内存空间里的内存是通过内存映射技术来提供的。
LargeObjectSpace同时派生自DiscontinuousSpace和AllocSpace。该空间里的内存资源可以分配给外部使用。在ART虚拟机中,如果一个Java对象(注意,该对象的类型必须为Java String或基础数据的数组类型,比如int数组)所需内存超过3个内存页时,将使用LargeObjectSpace来提供内存资源。 - 第四层包含ImageSpace和ContinuousMemMapAllocSpace两个类。
ImageSpace用于.art文件的加载。一个ImageSpace创建成功后,其对应的.art文件里所包含的mirror Object对象就算创建完毕并加载到内存里了。
ContinuousMemMapAllocSpace代表一个可对外提供连续内存资源的空间,其内存资源由内存映射技术提供。 - 第五层包含BumpPointerSpace、ZygoteSpace、RegionSpace和MallocSpace四个类。
其中只有MallocSpace是虚类,而其他三个类可直接用于分配内存资源,但所使用的内存分配算法各不相同。 - 第六层包含DlMallocSpace和RosAllocSpace两个类,它们派生自MallocSpace。这两个类也用于内存分配,只不过使用了不同的内存分配算法。
class Space;
class AllocSpace;
class ContinuousSpace : public Space {
...}
class MemMapSpace : public ContinuousSpace {
...}
class ImageSpace : public MemMapSpace {
...}
class ContinuousMemMapAllocSpace : public MemMapSpace, public AllocSpace {
...}
class ZygoteSpace FINAL : public ContinuousMemMapAllocSpace {
...}
class BumpPointerSpace FINAL : public ContinuousMemMapAllocSpace {
...}
class RegionSpace FINAL : public ContinuousMemMapAllocSpace {
...}
class MallocSpace : public ContinuousMemMapAllocSpace {
...}
class DlMallocSpace : public MallocSpace {
...}
class RosAllocSpace : public MallocSpace {
...}
class DiscontinuousSpace : public Space {
...}
class LargeObjectSpace : public DiscontinuousSpace, public AllocSpace {
...}
enum SpaceType {
kSpaceTypeImageSpace,
kSpaceTypeMallocSpace,
kSpaceTypeZygoteSpace,
kSpaceTypeBumpPointerSpace,
kSpaceTypeLargeObjectSpace,
kSpaceTypeRegionSpace,
};
enum GcRetentionPolicy {
// Objects are retained forever with this policy for a space.
kGcRetentionPolicyNeverCollect,
// Every GC cycle will attempt to collect objects in this space.
kGcRetentionPolicyAlwaysCollect,
// Objects will be considered for collection only in "full" GC cycles, ie faster partial collections won't scan these areas such as the Zygote.
kGcRetentionPolicyFullCollect,
};
// A space contains memory allocated for managed objects.
class Space {
public:
// The policy of when objects are collected associated with this space.
GcRetentionPolicy GetGcRetentionPolicy() const {
return gc_retention_policy_;
}
// Is the given object contained within this space?
virtual bool Contains(const mirror::Object* obj) const = 0;
// The kind of space this: image, alloc, zygote, large object.
virtual SpaceType GetType() const = 0;
// Returns true if objects in the space are movable.
virtual bool CanMoveObjects() const = 0;
virtual ~Space() {
}
protected:
Space(const std::string& name, GcRetentionPolicy gc_retention_policy);
void SetGcRetentionPolicy(GcRetentionPolicy gc_retention_policy) {
gc_retention_policy_ = gc_retention_policy;
}
// Name of the space that may vary due to the Zygote fork.
std::string name_;
protected:
GcRetentionPolicy gc_retention_policy_;
}
// AllocSpace interface.
class AllocSpace {
public:
// Number of bytes currently allocated.
virtual uint64_t GetBytesAllocated() = 0;
// Number of objects currently allocated.
virtual uint64_t GetObjectsAllocated() = 0;
// Allocate num_bytes without allowing growth. If the allocation
// succeeds, the output parameter bytes_allocated will be set to the
// actually allocated bytes which is >= num_bytes.
// Alloc can be called from multiple threads at the same time and must be thread-safe.
//
// bytes_tl_bulk_allocated - bytes allocated in bulk ahead of time for a thread local allocation,
// if applicable. It can be
// 1) equal to bytes_allocated if it's not a thread local allocation,
// 2) greater than bytes_allocated if it's a thread local
// allocation that required a new buffer, or
// 3) zero if it's a thread local allocation in an existing
// buffer.
// This is what is to be added to Heap::num_bytes_allocated_.
virtual mirror::Object* Alloc(Thread* self, size_t num_bytes, size_t* bytes_allocated,
size_t* usable_size, size_t* bytes_tl_bulk_allocated) = 0;
// Thread-unsafe allocation for when mutators are suspended, used by the semispace collector.
virtual mirror::Object* AllocThreadUnsafe(Thread* self, size_t num_bytes, size_t* bytes_allocated,
size_t* usable_size,
size_t* bytes_tl_bulk_allocated)
REQUIRES(Locks::mutator_lock_) {
return Alloc(self, num_bytes, bytes_allocated, usable_size, bytes_tl_bulk_allocated);
}
// Return the storage space required by obj.
virtual size_t AllocationSize(mirror::Object* obj, size_t* usable_size) = 0;
// Returns how many bytes were freed.
virtual size_t Free(Thread* self, mirror::Object* ptr) = 0;
// Returns how many bytes were freed.
virtual size_t FreeList(Thread* self, size_t num_ptrs, mirror::Object** ptrs) = 0;
// Revoke any sort of thread-local buffers that are used to speed up allocations for the given
// thread, if the alloc space implementation uses any.
// Returns the total free bytes in the revoked thread local runs that's to be subtracted
// from Heap::num_bytes_allocated_ or zero if unnecessary.
virtual size_t RevokeThreadLocalBuffers(Thread* thread) = 0;
// Revoke any sort of thread-local buffers that are used to speed up allocations for all the
// threads, if the alloc space implementation uses any.
// Returns the total free bytes in the revoked thread local runs that's to be subtracted
// from Heap::num_bytes_allocated_ or zero if unnecessary.
virtual size_t RevokeAllThreadLocalBuffers() = 0;
virtual void LogFragmentationAllocFailure(std::ostream& os, size_t failed_alloc_bytes) = 0;
protected:
struct SweepCallbackContext {
SweepCallbackContext(bool swap_bitmaps, space::Space* space);
const bool swap_bitmaps;
space::Space* const space;
Thread* const self;
collector::ObjectBytePair freed;
};
AllocSpace() {
}
virtual ~AllocSpace() {
}
};
父类
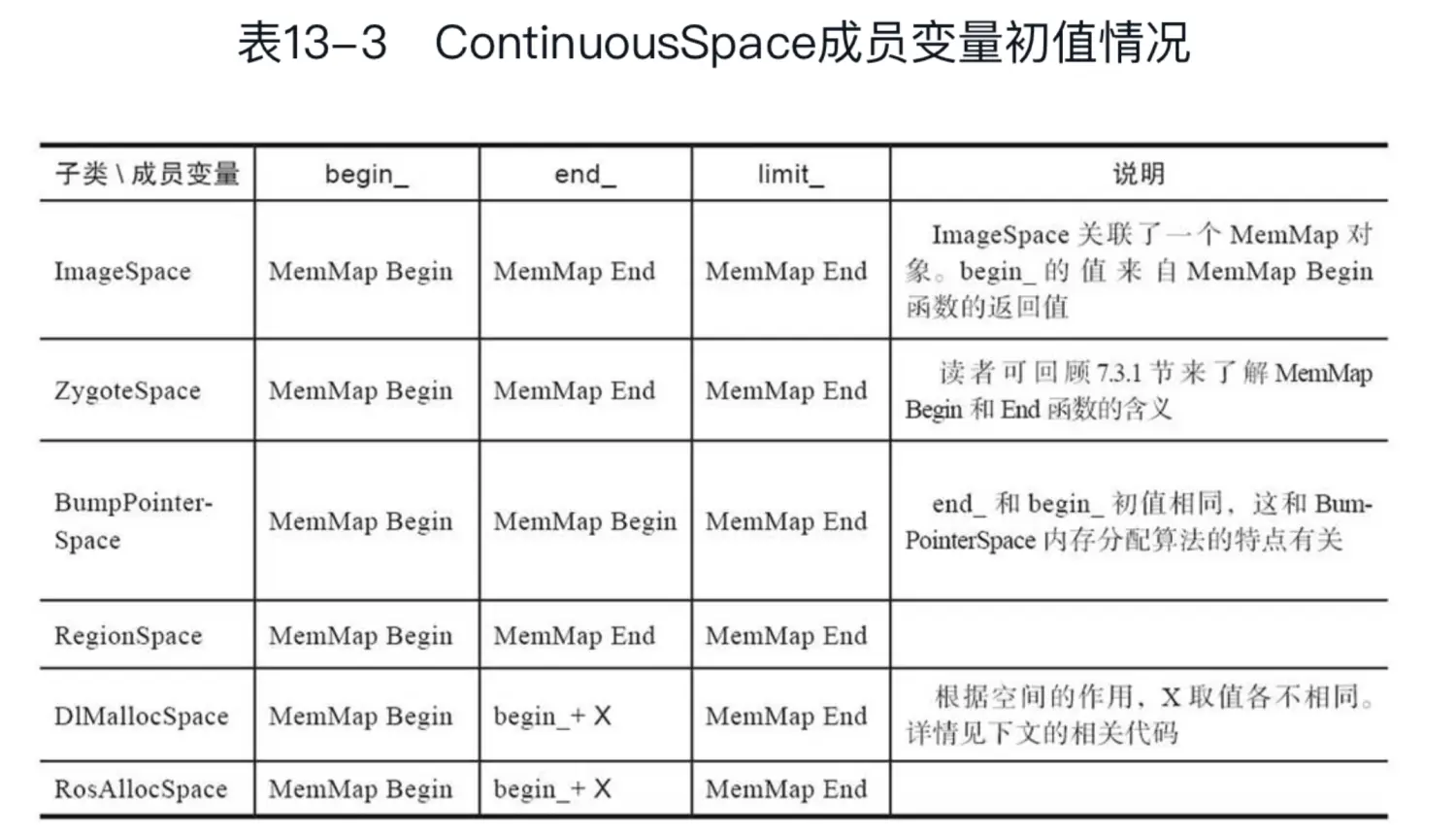
ContinuousSpace类
// Continuous spaces have bitmaps, and an address range. Although not required, objects within
// continuous spaces can be marked in the card table.
class ContinuousSpace : public Space {
private:
// The beginning of the storage for fast access.
// Address at which the space begins.
uint8_t* begin_;
// Current end of the space.
// Current address at which the space ends, which may vary as the space is filled.
Atomic<uint8_t*> end_;
// Limit of the space.
// The end of the address range covered by the space.
uint8_t* limit_;
public:
// Current size of space
size_t Size() const {
return End() - Begin();
}
// Maximum which the mapped space can grow to.
virtual size_t Capacity() const {
return Limit() - Begin();
}
// pure virtual functions
virtual accounting::ContinuousSpaceBitmap* GetLiveBitmap() const = 0;
virtual accounting::ContinuousSpaceBitmap* GetMarkBitmap() const = 0;
}
DiscontinuousSpace类
// Required object alignment
static constexpr size_t kObjectAlignment = 8;
static constexpr size_t kLargeObjectAlignment = kPageSize;
typedef SpaceBitmap<kObjectAlignment> ContinuousSpaceBitmap;
typedef SpaceBitmap<kLargeObjectAlignment> LargeObjectBitmap;
// A space where objects may be allocated higgledy-piggledy throughout virtual memory.
// Currently the card table can't cover these objects and so the write barrier shouldn't be triggered. // This is suitable for use for large primitive arrays.
class DiscontinuousSpace : public Space {
public:
accounting::LargeObjectBitmap* GetLiveBitmap() const {
return live_bitmap_.get();
}
accounting::LargeObjectBitmap* GetMarkBitmap() const {
return mark_bitmap_.get();
}
virtual bool IsDiscontinuousSpace() const OVERRIDE {
return true;
}
virtual ~DiscontinuousSpace() {
}
protected:
DiscontinuousSpace(const std::string& name, GcRetentionPolicy gc_retention_policy);
std::unique_ptr<accounting::LargeObjectBitmap> live_bitmap_;
std::unique_ptr<accounting::LargeObjectBitmap> mark_bitmap_;
private:
DISALLOW_IMPLICIT_CONSTRUCTORS(DiscontinuousSpace);
};
// 该父类初始化时即初始化了live_bitmap_、mark_bitmap_
DiscontinuousSpace::DiscontinuousSpace(const std::string& name, GcRetentionPolicy gc_retention_policy) : Space(name, gc_retention_policy) {
const size_t capacity = static_cast<size_t>(std::numeric_limits<uint32_t>::max());
live_bitmap_.reset(accounting::LargeObjectBitmap::Create("large live objects", nullptr, capacity));
mark_bitmap_.reset(accounting::LargeObjectBitmap::Create("large marked objects", nullptr, capacity));
}
MemMapSpace
内部持有mem_map_
class MemMapSpace : public ContinuousSpace {
protected:
// Underlying storage of the space
std::unique_ptr<MemMap> mem_map_;
};
ContinuousMemMapAllocSpace
针对ContinuousMemMapAllocSpace中的三个位图成员变量,其子类中:
- ZygoteSpace会设置live_bitmap_和mark_bitmap_。注意,这两个成员变量的值由外部传入,并非由ZygoteSpace自己创建。
- BumpPointerSpace和RegionSpace不设置这三个成员变量。
- DlMallocSpace和RosAllocSpace在它们的基类MallocSpace构造函数中初始化live_bitmap_和mark_bitmap_成员变量。
// Required object alignment
static constexpr size_t kObjectAlignment = 8;
static constexpr size_t kLargeObjectAlignment = kPageSize;
typedef SpaceBitmap<kObjectAlignment> ContinuousSpaceBitmap;
typedef SpaceBitmap<kLargeObjectAlignment> LargeObjectBitmap;
// Used by the heap compaction interface to enable copying from one type of alloc space to another.
class ContinuousMemMapAllocSpace : public MemMapSpace, public AllocSpace {
protected:
std::unique_ptr<accounting::ContinuousSpaceBitmap> live_bitmap_;
std::unique_ptr<accounting::ContinuousSpaceBitmap> mark_bitmap_;
std::unique_ptr<accounting::ContinuousSpaceBitmap> temp_bitmap_;
}
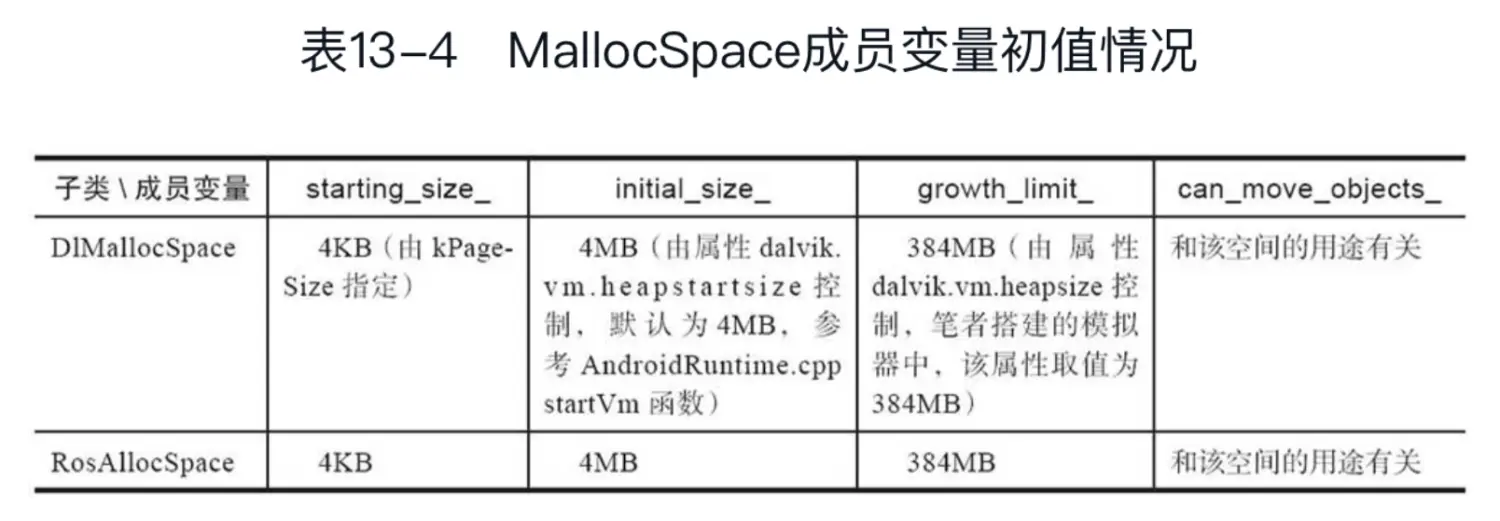
MallocSpace
在构造函数中初始化live_bitmap_和mark_bitmap_成员变量。
// A common parent of DlMallocSpace and RosAllocSpace.
class MallocSpace : public ContinuousMemMapAllocSpace {
protected:
// The growth_limit_ is used as the capacity of the alloc_space_ 内存分配的最高水位线,最大可分配内存不允许超过growth_limit_
size_t growth_limit_;
// True if objects in the space are movable. 和gc相关
bool can_move_objects_;
// Starting and initial sized, used when you reset the space.
const size_t starting_size_;
const size_t initial_size_;
}
// 全局静态变量
size_t MallocSpace::bitmap_index_ = 0;
MallocSpace::MallocSpace(const std::string& name, MemMap* mem_map, uint8_t* begin, uint8_t* end, uint8_t* limit, size_t growth_limit, bool create_bitmaps, bool can_move_objects, size_t starting_size, size_t initial_size)
: ContinuousMemMapAllocSpace(name, mem_map, begin, end, limit, kGcRetentionPolicyAlwaysCollect), recent_free_pos_(0), lock_("allocation space lock", kAllocSpaceLock), growth_limit_(growth_limit), can_move_objects_(can_move_objects), starting_size_(starting_size), initial_size_(initial_size) {
if (create_bitmaps) {
size_t bitmap_index = bitmap_index_++;
static const uintptr_t kGcCardSize = static_cast<uintptr_t>(accounting::CardTable::kCardSize);
live_bitmap_.reset(accounting::ContinuousSpaceBitmap::Create(
StringPrintf("allocspace %s live-bitmap %d", name.c_str(), static_cast<int>(bitmap_index)),
Begin(), NonGrowthLimitCapacity()));
mark_bitmap_.reset(accounting::ContinuousSpaceBitmap::Create(
StringPrintf("allocspace %s mark-bitmap %d", name.c_str(), static_cast<int>(bitmap_index)),
Begin(), NonGrowthLimitCapacity()));
}
for (auto& freed : recent_freed_objects_) {
freed.first = nullptr;
freed.second = nullptr;
}
}
具体实现类
ZygoteSpace
An zygote space is a space which you cannot allocate into or free from.
ZygoteSpace虽然继承了AllocSpace,但它并没有真正提供内存分配和回收的功能。
art/runtime/gc/space/zygote_space.h
art/runtime/gc/space/zygote_space.cc
class ZygoteSpace FINAL : public ContinuousMemMapAllocSpace {
...}
ZygoteSpace* ZygoteSpace::Create(const std::string& name, MemMap* mem_map,
accounting::ContinuousSpaceBitmap* live_bitmap,
accounting::ContinuousSpaceBitmap* mark_bitmap) {
size_t objects_allocated = 0;
CountObjectsAllocated visitor(&objects_allocated);
ReaderMutexLock mu(Thread::Current(), *Locks::heap_bitmap_lock_);
live_bitmap->VisitMarkedRange(reinterpret_cast<uintptr_t>(mem_map->Begin()),
reinterpret_cast<uintptr_t>(mem_map->End()), visitor);
ZygoteSpace* zygote_space = new ZygoteSpace(name, mem_map, objects_allocated);
zygote_space->live_bitmap_.reset(live_bitmap);
zygote_space->mark_bitmap_.reset(mark_bitmap);
return zygote_space;
}
ZygoteSpace::ZygoteSpace(const std::string& name, MemMap* mem_map, size_t objects_allocated)
: ContinuousMemMapAllocSpace(name, mem_map, mem_map->Begin(), mem_map->End(), mem_map->End(), kGcRetentionPolicyFullCollect),
objects_allocated_(objects_allocated) {
}
void ZygoteSpace::Clear() {
UNIMPLEMENTED(FATAL);
UNREACHABLE();
}
mirror::Object* ZygoteSpace::Alloc(Thread*, size_t, size_t*, size_t*, size_t*) {
UNIMPLEMENTED(FATAL);
UNREACHABLE();
}
size_t ZygoteSpace::AllocationSize(mirror::Object*, size_t*) {
UNIMPLEMENTED(FATAL);
UNREACHABLE();
}
size_t ZygoteSpace::Free(Thread*, mirror::Object*) {
UNIMPLEMENTED(FATAL);
UNREACHABLE();
}
size_t ZygoteSpace::FreeList(Thread*, size_t, mirror::Object**) {
UNIMPLEMENTED(FATAL);
UNREACHABLE();
}
BumpPointerSpace
-
BumpPointerSpace提供了一种极其简单的内存分配算法——顺序分配(英文叫Sequential Allocation或Linear Allocation)。即BumpPointerSpace内存分配逻辑就是第N次内存分配的起始位置为第N-1次内存分配的终点位置。所以,算法中只要有一个变量记住最后一次分配的终点位置即可,这个位置就叫Bump Pointer。
-
正因为BumpPointerSpace采用了如此简单的内存分配算法,所以它压根就不能释放某一次所分配的内存(和ZygoteSpace一样,Free等函数没有真正的实现),而只支持一次性释放所有已分配的内存(实现了AllocSpace的Clear函数,详情见下文代码分析)
-
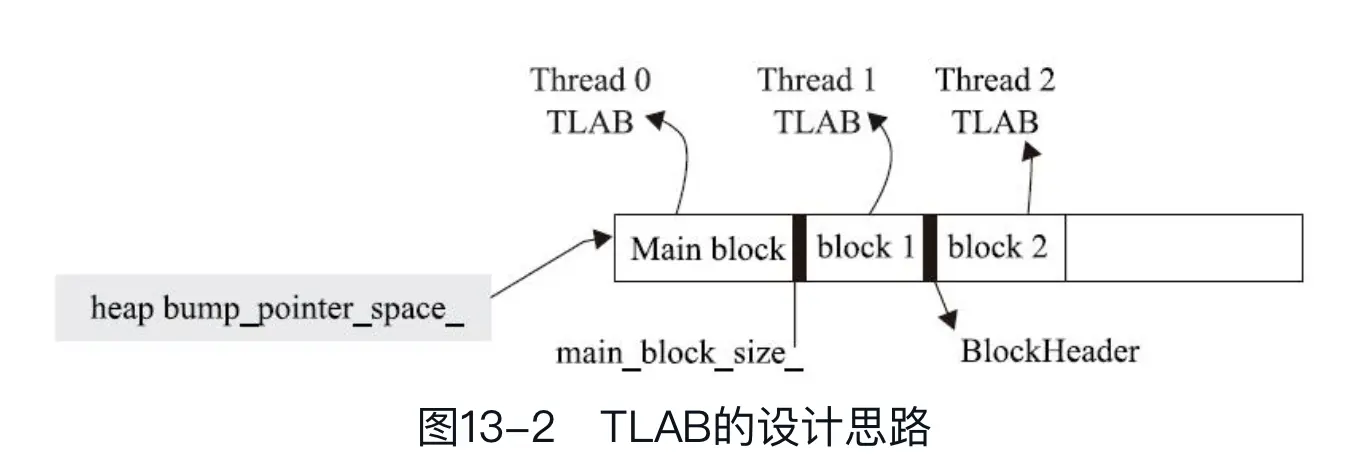
如此简单(换一种角度来说就是非常高效)的内存分配和释放算法使得BumpPointer-Space非常适合做线程本地内存分配——Thread Local Allocation Blocks,简写为TLAB,它代表一块专属某个线程的内存资源。
-
BumpPointerSpace提供了两种内存分配方法。
Alloc用于为某个mirror Object对象分配所需的内存。
AllocNewTlab:当ART虚拟机决定从调用线程的本地存储空间中分配内存时将调用此函数。 -
ART虚拟机里为每个Thread对象分配TLAB的方式:
Heap类中有一个名为bump_pointer_space_成员变量,它指向一个BumpPointerSpace对象。而这个BumpPointerSpace对应的内存空间可以被任意一个线程作为TLAB来使用。
第一个分配TLAB的线程将创建一个Main block。Main block位于内存资源的头部。其尾部位置由main_block_size_指明。
后续线程的TLAB都会有一个BlockHeader来描述。
art/runtime/gc/space/bump_pointer_space-inl.h
art/runtime/gc/space/bump_pointer_space.h
art/runtime/gc/space/bump_pointer_space.cc
class BumpPointerSpace FINAL : public ContinuousMemMapAllocSpace {
...}
BumpPointerSpace* BumpPointerSpace::Create(const std::string& name, size_t capacity, uint8_t* requested_begin) {
capacity = RoundUp(capacity, kPageSize);
std::string error_msg;
std::unique_ptr<MemMap> mem_map(MemMap::MapAnonymous(name.c_str(), requested_begin, capacity, PROT_READ | PROT_WRITE, true, false, &error_msg));
return new BumpPointerSpace(name, mem_map.release());
}
BumpPointerSpace* BumpPointerSpace::CreateFromMemMap(const std::string& name, MemMap* mem_map) {
return new BumpPointerSpace(name, mem_map);
}
BumpPointerSpace::BumpPointerSpace(const std::string& name, uint8_t* begin, uint8_t* limit)
: ContinuousMemMapAllocSpace(name, nullptr, begin, begin, limit, kGcRetentionPolicyAlwaysCollect),
growth_end_(limit),
objects_allocated_(0), bytes_allocated_(0),
block_lock_("Block lock"),
main_block_size_(0),
num_blocks_(0) {
}
accounting::ContinuousSpaceBitmap* GetLiveBitmap() const OVERRIDE {
return nullptr;
}
accounting::ContinuousSpaceBitmap* GetMarkBitmap() const OVERRIDE {
return nullptr;
}
inline mirror::Object* BumpPointerSpace::Alloc(Thread*, size_t num_bytes, size_t* bytes_allocated, size_t* usable_size, size_t* bytes_tl_bulk_allocated) {
// 按8字节向上对齐
num_bytes = RoundUp(num_bytes, kAlignment);
mirror::Object* ret = AllocNonvirtual(num_bytes);
if (LIKELY(ret != nullptr)) {
*bytes_allocated = num_bytes;
if (usable_size != nullptr) {
*usable_size = num_bytes;
}
*bytes_tl_bulk_allocated = num_bytes;
}
return ret;
}
bool BumpPointerSpace::AllocNewTlab(Thread* self, size_t bytes) {
MutexLock mu(Thread::Current(), block_lock_);
// 先释放self线程原先的TLAB
RevokeThreadLocalBuffersLocked(self);
uint8_t* start = AllocBlock(bytes);
if (start == nullptr) {
return false;
}
// 设置线程的TLAB
self->SetTlab(start, start + bytes);
return true;
}
size_t BumpPointerSpace::Free(Thread*, mirror::Object*) OVERRIDE {
//直接返回0,说明BumpPointerSpace不能释放某一个0bject所占据的内存
return 0;
}
size_t BumpPointerSpace::FreeList(Thread*, size_t, mirror::Object**) OVERRIDE {
//直接返回0,说明BumpPointerSpace不能释放某一个0bject所占据的内存
return 0;
}
void BumpPointerSpace::Clear() {
// Release the pages back to the operating system.
if (!kMadviseZeroes) {
memset(Begin(), 0, Limit() - Begin());
}
// Reset the end of the space back to the beginning, we move the end forward as we allocate objects.
SetEnd(Begin());
objects_allocated_.StoreRelaxed(0);
bytes_allocated_.StoreRelaxed(0);
growth_end_ = Limit();
{
MutexLock mu(Thread::Current(), block_lock_);
num_blocks_ = 0;
main_block_size_ = 0;
}
}
RegionSpace
- RegionSpace的内存分配算法是将内存资源划分成一个个固定大小(由kRegionSize指定,默认为1MB)的内存块。每一个内存块由一个Region对象表示。进行内存分配时,先找到满足要求的Region,然后从这个Region中分配资源。
- RegionSpace也可用作线程的TLAB。不过,它的AllocNewTlab比BumpPointerSpace的AllocNewTlab要简单得多,因为RegionSpace本身就是按一个一个地Region来管理的。如此,一个线程需要TLAB的话,我们只要找到一个空闲的Region给它就好了。
class RegionSpace FINAL : public ContinuousMemMapAllocSpace {
...}
static constexpr size_t kRegionSize = 1 * MB;
RegionSpace* RegionSpace::Create(const std::string& name, size_t capacity, uint8_t* requested_begin) {
// 按1M向上对齐
capacity = RoundUp(capacity, kRegionSize);
std::string error_msg;
std::unique_ptr<MemMap> mem_map(MemMap::MapAnonymous(name.c_str(), requested_begin, capacity, PROT_READ | PROT_WRITE, true, false, &error_msg));
return new RegionSpace(name, mem_map.release());
}
RegionSpace::RegionSpace(const std::string& name, MemMap* mem_map)
: ContinuousMemMapAllocSpace(name, mem_map, mem_map->Begin(), mem_map->End(), mem_map->End(), kGcRetentionPolicyAlwaysCollect),
region_lock_("Region lock", kRegionSpaceRegionLock), time_(1U) {
size_t mem_map_size = mem_map->Size();
// 计算多少个Region
num_regions_ = mem_map_size / kRegionSize;
num_non_free_regions_ = 0U; // 表示已经占有的内存块个数
// 创建并初始化Region数组
regions_.reset(new Region[num_regions_]);
uint8_t* region_addr = mem_map->Begin();
for (size_t i = 0; i < num_regions_; ++i, region_addr += kRegionSize) {
regions_[i] = Region(i, region_addr, region_addr + kRegionSize); // 1M内存地址
}
full_region_ = Region(); // 内存资源不足的内存块
current_region_ = &full_region_; // 指向当前正在使用的Region
evac_region_ = nullptr;
}
inline mirror::Object* RegionSpace::Alloc(Thread*, size_t num_bytes, size_t* bytes_allocated,
size_t* usable_size,
size_t* bytes_tl_bulk_allocated) {
num_bytes = RoundUp(num_bytes, kAlignment);
return AllocNonvirtual<false>(num_bytes, bytes_allocated, usable_size,
bytes_tl_bulk_allocated);
}
bool RegionSpace::AllocNewTlab(Thread* self) {
MutexLock mu(self, region_lock_);
RevokeThreadLocalBuffersLocked(self);
// Retain sufficient free regions for full evacuation.
if ((num_non_free_regions_ + 1) * 2 > num_regions_) {
return false;
}
// 遍历regions数组,找到一个free的
for (size_t i = 0; i < num_regions_; ++i) {
Region* r = ®ions_[i];
if (r->IsFree()) {
r->Unfree(time_);
++num_non_free_regions_;
r->SetTop(r->End());
// 将线程和该Region关联起来
r->is_a_tlab_ = true;
r->thread_ = self;
self->SetTlab(r->Begin(), r->End());
return true;
}
}
return false;
}
size_t RegionSpace::Free(Thread*, mirror::Object*) OVERRIDE {
UNIMPLEMENTED(FATAL);
return 0;
}
void RegionSpace::Clear() {
MutexLock mu(Thread::Current(), region_lock_);
for (size_t i = 0; i < num_regions_; ++i) {
Region* r = ®ions_[i];
if (!r->IsFree()) {
--num_non_free_regions_;
}
r->Clear();
}
current_region_ = &full_region_;
evac_region_ = &full_region_;
}
Region
class RegionSpace FINAL : public ContinuousMemMapAllocSpace {
// 用于描述内存块的类型,和GC相关
enum class RegionType : uint8_t {
kRegionTypeAll, // All types.
kRegionTypeFromSpace, // From-space. To be evacuated.
kRegionTypeUnevacFromSpace, // Unevacuated from-space. Not to be evacuated.
kRegionTypeToSpace, // To-space.
kRegionTypeNone, // None.
};
// 用于描述内存块的内存分配状态
enum class RegionState : uint8_t {
kRegionStateFree, // Free region,还没分配过内存的
kRegionStateAllocated, // Allocated region,分配过一些内存的
// 如3.5M大小的对象,需要4个内存块来分配;第一个类型为kRegionStateLarge,后面三个为kRegionStateLargeTail;注意第四个Region剩余的0.5M不能再用于分配其他内存
kRegionStateLarge, // Large allocated (allocation larger than the region size).
kRegionStateLargeTail, // Large tail (non-first regions of a large allocation).
};
class Region {
public:
Region():
// idx为内存块在regions数组中的索引
idx_(static_cast<size_t>(-1)),
// begin、end表示内存的起始位置,top为内存分配的水位线
begin_(nullptr), top_(nullptr), end_(nullptr),
state_(RegionState::kRegionStateAllocated), type_(RegionType::kRegionTypeToSpace),
objects_allocated_(0), alloc_time_(0), live_bytes_(static_cast<size_t>(-1)),
is_newly_allocated_(false), is_a_tlab_(false), thread_(nullptr) {
}
Region(size_t idx, uint8_t* begin, uint8_t* end)
: idx_(idx), begin_(begin), top_(begin), end_(end),
state_(RegionState::kRegionStateFree), type_(RegionType::kRegionTypeNone),
objects_allocated_(0), alloc_time_(0), live_bytes_(static_cast<size_t>(-1)),
is_newly_allocated_(false), is_a_tlab_(false), thread_(nullptr) {
}
...
}
DlMallocSpace
DlMallocSpace使用开源的dlmalloc来提供具体的内存分配和释放算法。
RosAllocSpace使用了谷歌开发的rosalloc内存分配管理器。相比而言,rosalloc的用法比dlmalloc要复杂得多。而且还需要ART虚拟机中其他模块进行配合。不过,复杂的结果自然是ART虚拟机里rosalloc分配的效果要比dlmalloc更好。
class DlMallocSpace : public MallocSpace {
...}
DlMallocSpace* DlMallocSpace::Create(const std::string& name, size_t initial_size, size_t growth_limit, size_t capacity, uint8_t* requested_begin, bool can_move_objects) {
uint64_t start_time = 0;
// Memory we promise to dlmalloc before it asks for morecore.
// Note: making this value large means that large allocations are unlikely to succeed as dlmalloc
// will ask for this memory from sys_alloc which will fail as the footprint (this value plus the
// size of the large allocation) will be greater than the footprint limit.
size_t starting_size = kPageSize;
MemMap* mem_map = CreateMemMap(name, starting_size, &initial_size, &growth_limit, &capacity, requested_begin);
DlMallocSpace* space = CreateFromMemMap(mem_map, name, starting_size, initial_size, growth_limit, capacity, can_move_objects);
return space;
}
DlMallocSpace* DlMallocSpace::CreateFromMemMap(MemMap* mem_map, const std::string& name,size_t starting_size, size_t initial_size, size_t growth_limit, size_t capacity, bool can_move_objects) {
// 使用dlmalloc库创建mspace
void* mspace = CreateMspace(mem_map->Begin(), starting_size, initial_size);
// Protect memory beyond the starting size. morecore will add r/w permissions when necessory
uint8_t* end = mem_map->Begin() + starting_size;
// Everything is set so record in immutable structure and leave
uint8_t* begin = mem_map->Begin();
return new DlMallocSpace(mem_map, initial_size, name, mspace, begin, end, begin + capacity,
growth_limit, can_move_objects, starting_size);
}
void* DlMallocSpace::CreateMspace(void* begin, size_t morecore_start, size_t initial_size) {
void* msp = create_mspace_with_base(begin, morecore_start, false /*locked*/);
return msp;
}
virtual mirror::Object* Alloc(Thread* self, size_t num_bytes, size_t* bytes_allocated, size_t* usable_size, size_t* bytes_tl_bulk_allocated)
OVERRIDE REQUIRES(!lock_) {
return AllocNonvirtual(self, num_bytes, bytes_allocated, usable_size, bytes_tl_bulk_allocated);
}
inline mirror::Object* DlMallocSpace::AllocNonvirtual(Thread* self, size_t num_bytes,
size_t* bytes_allocated,
size_t* usable_size,
size_t* bytes_tl_bulk_allocated) {
mirror::Object* obj;
{
MutexLock mu(self, lock_);
obj = AllocWithoutGrowthLocked(self, num_bytes, bytes_allocated, usable_size, bytes_tl_bulk_allocated);
}
return obj;
}
inline mirror::Object* DlMallocSpace::AllocWithoutGrowthLocked(
Thread* /*self*/, size_t num_bytes,
size_t* bytes_allocated,
size_t* usable_size,
size_t* bytes_tl_bulk_allocated) {
mirror::Object* result = reinterpret_cast<mirror::Object*>(mspace_malloc(mspace_, num_bytes));
if (LIKELY(result != nullptr)) {
size_t allocation_size = AllocationSizeNonvirtual(result, usable_size);
*bytes_allocated = allocation_size;
*bytes_tl_bulk_allocated = allocation_size;
}
return result;
}
size_t DlMallocSpace::Free(Thread* self, mirror::Object* ptr) {
MutexLock mu(self, lock_);
const size_t bytes_freed = AllocationSizeNonvirtual(ptr, nullptr);
if (kRecentFreeCount > 0) {
RegisterRecentFree(ptr);
}
mspace_free(mspace_, ptr);
return bytes_freed;
}
inline size_t DlMallocSpace::AllocationSizeNonvirtual(mirror::Object* obj, size_t* usable_size) {
void* obj_ptr = const_cast<void*>(reinterpret_cast<const void*>(obj));
size_t size = mspace_usable_size(obj_ptr);
if (usable_size != nullptr) {
*usable_size = size;
}
return size + kChunkOverhead;
}
void DlMallocSpace::Clear() {
size_t footprint_limit = GetFootprintLimit();
madvise(GetMemMap()->Begin(), GetMemMap()->Size(), MADV_DONTNEED);
live_bitmap_->Clear();
mark_bitmap_->Clear();
SetEnd(Begin() + starting_size_);
mspace_ = CreateMspace(mem_map_->Begin(), starting_size_, initial_size_);
SetFootprintLimit(footprint_limit);
}
RosAllocSpace
- 和DlMallocSpace的代码逻辑类似,RosAllocSpace中内存分配和释放的核心工作由rosalloc来完成。
- rosalloc的本质和dlmalloc一样,它是一种动态内存分配(dynamic memory allocation)的算法。只不过rosalloc不像dlmalloc那么通用(dlmalloc可以作为libc库中malloc函数的实现),它专门服务于Android系统中的ART虚拟机。
- rosalloc名称中的ros是run of slot的缩写,slot和run都是代码中的类。
art/runtime/gc/space/rosalloc_space.h
art/runtime/gc/space/rosalloc_space.cc
art/runtime/gc/space/rosalloc_space-inl.h
class RosAllocSpace : public MallocSpace {
...}
RosAllocSpace* RosAllocSpace::Create(const std::string& name, size_t initial_size,
size_t growth_limit, size_t capacity, uint8_t* requested_begin,
bool low_memory_mode, bool can_move_objects) {
size_t starting_size = Heap::kDefaultStartingSize; // 一个内存页大小
MemMap* mem_map = CreateMemMap(name, starting_size, &initial_size, &growth_limit, &capacity, requested_begin);
RosAllocSpace* space = CreateFromMemMap(mem_map, name, starting_size, initial_size, growth_limit, capacity, low_memory_mode, can_move_objects);
return space;
}
RosAllocSpace* RosAllocSpace::CreateFromMemMap(MemMap* mem_map, const std::string& name, size_t starting_size, size_t initial_size, size_t growth_limit, size_t capacity, bool low_memory_mode, bool can_move_objects) {
bool running_on_memory_tool = Runtime::Current()->IsRunningOnMemoryTool();
allocator::RosAlloc* rosalloc = CreateRosAlloc(mem_map->Begin(), starting_size, initial_size, capacity, low_memory_mode, running_on_memory_tool);
uint8_t* end = mem_map->Begin() + starting_size;
uint8_t* begin = mem_map->Begin();
if (running_on_memory_tool) {
...
} else {
return new RosAllocSpace(mem_map, initial_size, name, rosalloc, begin, end, begin + capacity, growth_limit, can_move_objects, starting_size, low_memory_mode);
}
}
allocator::RosAlloc* RosAllocSpace::CreateRosAlloc(void* begin, size_t morecore_start, size_t initial_size, size_t maximum_size, bool low_memory_mode, bool running_on_memory_tool) {
errno = 0;
// 创建RosAlloc对象,这里就是rosalloc模块了
allocator::RosAlloc* rosalloc = new art::gc::allocator::RosAlloc(begin, morecore_start, maximum_size, low_memory_mode ? art::gc::allocator::RosAlloc::kPageReleaseModeAll : art::gc::allocator::RosAlloc::kPageReleaseModeSizeAndEnd, running_on_memory_tool);
if (rosalloc != nullptr) {
rosalloc->SetFootprintLimit(initial_size);
}
return rosalloc;
}
mirror::Object* Alloc(Thread* self, size_t num_bytes, size_t* bytes_allocated, size_t* usable_size, size_t* bytes_tl_bulk_allocated) OVERRIDE {
return AllocNonvirtual(self, num_bytes, bytes_allocated, usable_size, bytes_tl_bulk_allocated);
}
mirror::Object* AllocNonvirtual(Thread* self, size_t num_bytes, size_t* bytes_allocated, size_t* usable_size, size_t* bytes_tl_bulk_allocated) {
return AllocCommon(self, num_bytes, bytes_allocated, usable_size, bytes_tl_bulk_allocated);
}
template<bool kThreadSafe>
inline mirror::Object* RosAllocSpace::AllocCommon(Thread* self, size_t num_bytes, size_t* bytes_allocated, size_t* usable_size, size_t* bytes_tl_bulk_allocated) {
size_t rosalloc_bytes_allocated = 0;
size_t rosalloc_usable_size = 0;
size_t rosalloc_bytes_tl_bulk_allocated = 0;
if (!kThreadSafe) {
Locks::mutator_lock_->AssertExclusiveHeld(self);
}
// 分配内存
mirror::Object* result = reinterpret_cast<mirror::Object*>(
rosalloc_->Alloc<kThreadSafe>(self, num_bytes, &rosalloc_bytes_allocated, &rosalloc_usable_size, &rosalloc_bytes_tl_bulk_allocated));
if (LIKELY(result != nullptr)) {
*bytes_allocated = rosalloc_bytes_allocated;
if (usable_size != nullptr) {
*usable_size = rosalloc_usable_size;
}
*bytes_tl_bulk_allocated = rosalloc_bytes_tl_bulk_allocated;
}
return result;
}
size_t RosAllocSpace::Free(Thread* self, mirror::Object* ptr) {
if (kRecentFreeCount > 0) {
MutexLock mu(self, lock_);
RegisterRecentFree(ptr);
}
return rosalloc_->Free(self, ptr);
}
LargeObjectSpace
-
什么时候使用LargeObjectSpace:
如果一个对象所需内存大小超过设定的阈值(由Heap类的large_object_threshold_成员变量指示),默认值为kDefaultLargeObjectThreshold(大小为3个内存页,即12KB)。同时,该对象的类型必须是Java基础类型的数组(比如int[]、boolean[])或当Java对象的类型是java.lang.String时。 -
LargeObjectSpace有两个派生类,分别是LargeObjectMapSpace和FreeListSpace。
LargeObjectMapSpace和FreeListSpace提供了两种不同的内存分配算法。ART虚拟机中要么使用LargeObjectMapSpace,要么使用FreeListSpace。
在堆创建时初始化large_object_space时候根据large_object_space_type选择使用哪一个。 -
LargeObjectMapSpace在分配内存时会为每一次分配都mmap一块内存空间。
LargeObjectMapSpace根本就没有什么算法,有需要它就直接从操作系统中映射一块内存空间。所以,它比BumpPointerSpace的内存分配算法还要简单。
art/runtime/gc/space/large_object_space.h
art/runtime/gc/space/large_object_space.cc
// A discontinuous large object space implemented by individual mmap/munmap calls.
class LargeObjectMapSpace : public LargeObjectSpace {
}
// A continuous large object space with a free-list to handle holes.
class FreeListSpace FINAL : public LargeObjectSpace {
}
LargeObjectMapSpace::LargeObjectMapSpace(const std::string& name)
: LargeObjectSpace(name, nullptr, nullptr),
lock_("large object map space lock", kAllocSpaceLock) {
}
LargeObjectMapSpace* LargeObjectMapSpace::Create(const std::string& name) {
if (Runtime::Current()->IsRunningOnMemoryTool()) {
...
} else {
return new LargeObjectMapSpace(name);
}
}
mirror::Object* LargeObjectMapSpace::Alloc(Thread* self, size_t num_bytes, size_t* bytes_allocated, size_t* usable_size, size_t* bytes_tl_bulk_allocated) {
std::string error_msg;
MemMap* mem_map = MemMap::MapAnonymous("large object space allocation", nullptr, num_bytes, PROT_READ | PROT_WRITE, true, false, &error_msg);
mirror::Object* const obj = reinterpret_cast<mirror::Object*>(mem_map->Begin());
MutexLock mu(self, lock_);
large_objects_.Put(obj, LargeObject {
mem_map, false /* not zygote */});
const size_t allocation_size = mem_map->BaseSize();
begin_ = std::min(begin_, reinterpret_cast<uint8_t*>(obj));
uint8_t* obj_end = reinterpret_cast<uint8_t*>(obj) + allocation_size;
if (end_ == nullptr || obj_end > end_) {
end_ = obj_end;
}
*bytes_allocated = allocation_size;
if (usable_size != nullptr) {
*usable_size = allocation_size;
}
*bytes_tl_bulk_allocated = allocation_size;
num_bytes_allocated_ += allocation_size;
total_bytes_allocated_ += allocation_size;
++num_objects_allocated_;
++total_objects_allocated_;
return obj;
}
FreeListSpace* FreeListSpace::Create(const std::string& name, uint8_t* requested_begin, size_t size) {
std::string error_msg;
MemMap* mem_map = MemMap::MapAnonymous(name.c_str(), requested_begin, size, PROT_READ | PROT_WRITE, true, false, &error_msg);
return new FreeListSpace(name, mem_map, mem_map->Begin(), mem_map->End());
}
FreeListSpace::FreeListSpace(const std::string& name, MemMap* mem_map, uint8_t* begin, uint8_t* end)
: LargeObjectSpace(name, begin, end), mem_map_(mem_map), lock_("free list space lock", kAllocSpaceLock) {
const size_t space_capacity = end - begin;
free_end_ = space_capacity;
const size_t alloc_info_size = sizeof(AllocationInfo) * (space_capacity / kAlignment);
std::string error_msg;
allocation_info_map_.reset(
MemMap::MapAnonymous("large object free list space allocation info map", nullptr, alloc_info_size, PROT_READ | PROT_WRITE, false, false, &error_msg)
);
allocation_info_ = reinterpret_cast<AllocationInfo*>(allocation_info_map_->Begin());
}
mirror::Object* FreeListSpace::Alloc(Thread* self, size_t num_bytes, size_t* bytes_allocated,
size_t* usable_size, size_t* bytes_tl_bulk_allocated) {
MutexLock mu(self, lock_);
const size_t allocation_size = RoundUp(num_bytes, kAlignment);
AllocationInfo temp_info;
temp_info.SetPrevFreeBytes(allocation_size);
temp_info.SetByteSize(0, false);
AllocationInfo* new_info;
// Find the smallest chunk at least num_bytes in size.
auto it = free_blocks_.lower_bound(&temp_info);
if (it != free_blocks_.end()) {
AllocationInfo* info = *it;
free_blocks_.erase(it);
// Fit our object in the previous allocation info free space.
new_info = info->GetPrevFreeInfo();
// Remove the newly allocated block from the info and update the prev_free_.
info->SetPrevFreeBytes(info->GetPrevFreeBytes() - allocation_size);
if (info->GetPrevFreeBytes() > 0) {
AllocationInfo* new_free = info - info->GetPrevFree();
new_free->SetPrevFreeBytes(0);
new_free->SetByteSize(info->GetPrevFreeBytes(), true);
// If there is remaining space, insert back into the free set.
free_blocks_.insert(info);
}
} else {
// Try to steal some memory from the free space at the end of the space.
if (LIKELY(free_end_ >= allocation_size)) {
// Fit our object at the start of the end free block.
new_info = GetAllocationInfoForAddress(reinterpret_cast<uintptr_t>(End()) - free_end_);
free_end_ -= allocation_size;
} else {
return nullptr;
}
}
*bytes_allocated = allocation_size;
if (usable_size != nullptr) {
*usable_size = allocation_size;
}
*bytes_tl_bulk_allocated = allocation_size;
++num_objects_allocated_;
++total_objects_allocated_;
num_bytes_allocated_ += allocation_size;
total_bytes_allocated_ += allocation_size;
mirror::Object* obj = reinterpret_cast<mirror::Object*>(GetAddressForAllocationInfo(new_info));
// We always put our object at the start of the free block, there cannot be another free block before it.
new_info->SetPrevFreeBytes(0);
new_info->SetByteSize(allocation_size, false);
return obj;
}