ORB (Oriented FAST and Rotated BRIEF)
目标
• 我们要学习 ORB 算法的基础
对于一个 OpenCV 的狂热爱好者来说 ORB 最重要的一点就是:它来自“OpenCV_Labs’'。这个算法是在 2011 年提出的。在计算开支,匹配效率以及更主要的是专利问题方面 ORB 算法是是 SIFT 和 SURF 算法的一个很好的替代品。SIFT 和 SURF 算法是有专利保护的,如果你要使用它们,就可能要花钱。但是 ORB 不需要!!!
ORB 基本是 FAST 关键点检测和 BRIEF 关键点描述器的结合体,并通过很多修改增强了性能。首先它使用 FAST 找到关键点,然后再使用 Harris角点检测对这些关键点进行排序找到其中的前 N 个点。它也使用金字塔从而产生尺度不变性特征。但是有一个问题,FAST 算法步计算方向。那旋转不变性怎样解决呢?作者进行了如下修改。
它使用灰度矩的算法计算出角点的方向。以角点到角点所在(小块)区域质心的方向为向量的方向。为了进一步提高旋转不变性,要计算以角点为中心半径为 r 的圆形区域的矩,再根据矩计算除方向。
对于描述符,ORB 使用的是 BRIEF 描述符。但是我们已经知道 BRIEF
对与旋转是不稳定的。所以我们在生成特征前,要把关键点领域的这个 patch的坐标轴旋转到关键点的方向。For any feature set of n binary tests at location ( x i {
{x}_{i}} xi, y i {
{y}_{i}} yi), define a 2×n matrix, S which contains the coordinates of these pixels. Then using the orientation of patch,θ, its rotation matrix is found and rotates the S to get steered(rotated) version S θ {
{S}_{θ}} Sθ.
ORB discretize the angle to increments of2π/30(12 degrees), and construct a lookup table of precomputed BRIEF patterns. As long as the keypoint orientation \theta is consistent across views, the correct set of points S θ {
{S}_{θ}} Sθ will be used to compute its descriptor.
BRIEF has an important property that each bit feature has a large variance and a mean near 0.5. But once it is oriented along keypoint direction, it loses this property and become more distributed. High variance makes a feature more discriminative, since it responds differentially to inputs. Another desirable property is to have the tests uncorrelated, since then each test will contribute to the result. To resolve all these, ORB runs a greedy search among all possible binary tests to find the ones that have both high variance and means close to 0.5, as well as being uncorrelated. The result is called rBRIEF.
For descriptor matching, multi-probe LSH which improves on the traditional LSH, is used. The paper says ORB is much faster than SURF and SIFT and ORB descriptor works better than SURF. ORB is a good choice in low-power devices for panorama stitching etc.
实验证明,BRIEF 算法的每一位的均值接近 0.5,并且方差很大。steered_BRIEF算法的每一位的均值比较分散(均值为 0.5,0.45,0.35… 等值的关键点数相当),这导致方差减小。数据的方差大的一个好处是:使得特征更容易分辨。为了对steered_BRIEF 算法使得特征的方差减小的弥补和减小数据间的相关性,用一个学习算法(learning method)选择二进制测试的一个子集。
在描述符匹配中使用了对传统 LSH 改善后的多探针 LSH。文章中说 ORB算法比 SURF 和 SIFT 算法快的多,ORB 描述符也比 SURF 好很多。ORB是低功耗设备的最佳选择。
OpenCV 中的 ORB 算法
和前面一样我们首先要使用函数 cv3.ORB() 或者 feature2d 通用接口创建一个 ORB 对象。它有几个可选参数。最有用的应该是 nfeature,默认值为 500,它表示了要保留特征的最大数目。scoreType 设置使用 Harris打分还是使用 FAST 打分对特征进行排序(默认是使用 Harris 打分)等。参数 WTA_K 决定了产生每个 oriented_BRIEF 描述符要使用的像素点的数目。默认值是 2,也就是一次选择两个点。在这种情况下进行匹配,要使用NORM_HAMMING 距离。如果 WTA_K 被设置成 3 或 4,那匹配距离就要设置为 NORM_HAMMING2。
下面是一个使用 ORB 的简单代码。
# -*- coding: utf-8 -*-
"""
Created on Thu Jan 23 22:41:39 2014
@author: duan
"""
import numpy as np
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('simple.jpg',0)
# Initiate STAR detector
orb = cv2.ORB()
# find the keypoints with ORB
kp = orb.detect(img,None)
# compute the descriptors with ORB
kp, des = orb.compute(img, kp)
# draw only keypoints location,not size and orientation
img2 = cv2.drawKeypoints(img,kp,color=(0,255,0), flags=0)
plt.imshow(img2),plt.show()
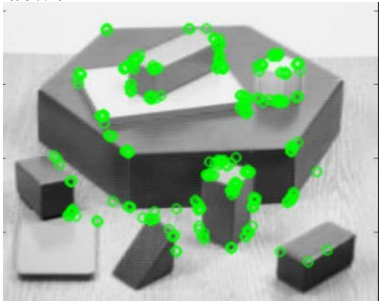
结果如下:
我们将在其他章节介绍 ORB 特征匹配。