显存优化综述
动态图和静态图
动态图是边计算边搭建计算图,中间结果一目了然。
静态图是先搭建计算图,最后喂入输入,直接出结果。
因为静态图在编译的时候进行了一些优化,比如改变了代码的计算过程,以利于GPU更好的并行计算,那么想debug看中间结果就很困难了,有时候看到的和期望的可能会有些出入。另外就是每次当我们搭建完一个动态计算图,然后在反向传播结束之后,整个计算图就在内存中被释放了。如果想再次使用的话,必须从头再搭一遍。
静态图显存优化
对于大网络结构的训练场景,在静态图上的显存优化主要可以分为三个方向:
- 静态显存分配。由于获得了整张计算图,所以可以去分析每一个 tensor 和每个算子的生命周期。对于生命周期没有重叠的算子,它们是可以共享显存的。
- 梯度检查点(用计算换显存)。设置一些梯度检查点,剩下的中间结果就先释放掉,如果将来在反向传播的过程中发现前向结果不在显存中,就找到最近的梯度检查点,恢复出被释放的 tensor。
- 内存交换(用带宽换显存)。把暂时不用的数据从 GPU 上交换到 CPU 上,到了需要的时候,再把它交换回来。
动态图显存优化
动态图无法提前获得全局的计算图信息。因为无法得到每个 tensor 的生命周期,所以静态显存分配不再可用
- 用计算换显存,也就是动态图版的 Sublinear 显存优化;
- 用带宽换显存,在 GPU 和 CPU 之间交换内容。
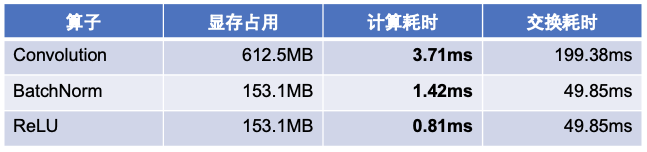
如上图所示,交换耗时比计算耗时高出很多,因此用带宽换显存不合理。

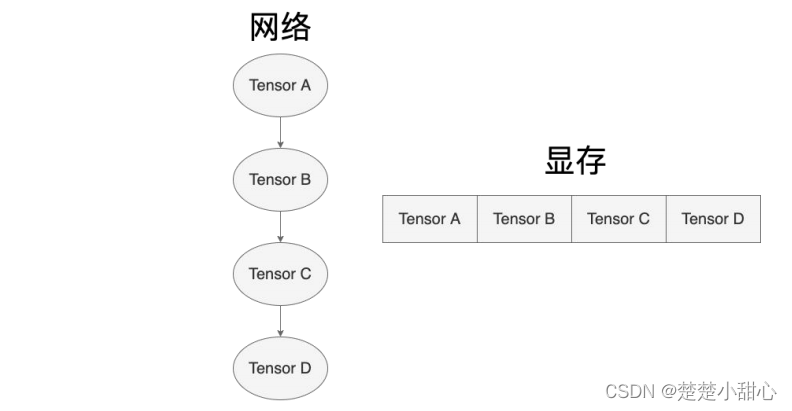
如上图所示,在前向传播中(第一行从左到右),蓝色圆圈表示模型的中间计算结果开始占用显存。一直到前向传播完成,第一行完全变为蓝色圆圈,前面计算所占用的显存都不能释放。
等到反向传播开始(第二行从右到左),随着梯度的计算与完成应用,前向传播保留在显存中的张量才可以释放。
很明显,如果要降低显存占用,就要拿前向传播保存的中间计算结果开刀,这也正是 MegEngine 动态图显存优化的主要方向。
如上为梯度检查点技术原理示意,前向传播中第三个点为检查点,它会一直保存在显存中。第四个点在完成计算后即可释放显存,在反向传播中如果需要第四个点的值,可以从第三个点重新计算出第四个点的值。
DTR
问题
- 大部分场景下,网络训练的中间特征占用了绝大部分得到显存,模型权重这是占据了极小的一部分。
- 这些中间特征在反向传播的算子中还需要用到,所以不好被释放。
解决办法
引入LRU cache的机制,选择代价最低的tensor进行释放,在需要用到的时候进行重计算。
- 重计算的开销越小越好
- 释放的tensor占用显存越大越好
- 该tensor的访问间隔越长越好
LRU cache:距离上次访问时间间隔最长的,进行释放
另外,DTR 论文中还提出,除了重计算带来的开销之外,其他的额外开销主要用于寻找应该被释放掉的最优 tensor。因为在显存中,tensor 停留的时长是不断在变化的,所以只能在需要释放的时候现场计算最优的 tensor。
对此,论文中提出了两个运行时的优化技巧:
-
不考虑小的 tensor,当 tensor 大小小于候选集中的 tensor 的平均大小的 1% 时,不加入候选集;
-
每次在需要释放 tensor 的时候,随机采样 sqrt(N) 个 tensor 进行遍历(N 为目前可释放的 tensor 候选集的大小)
重计算的局限性
-
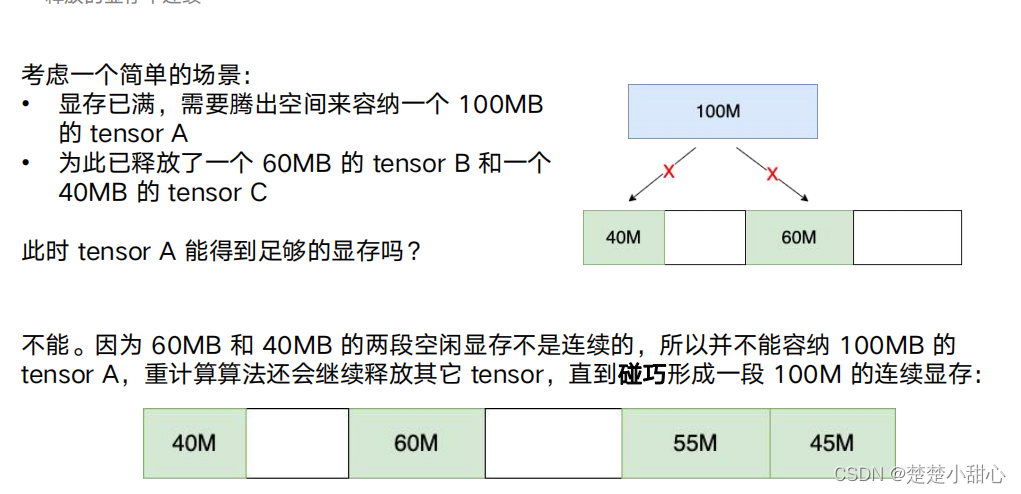
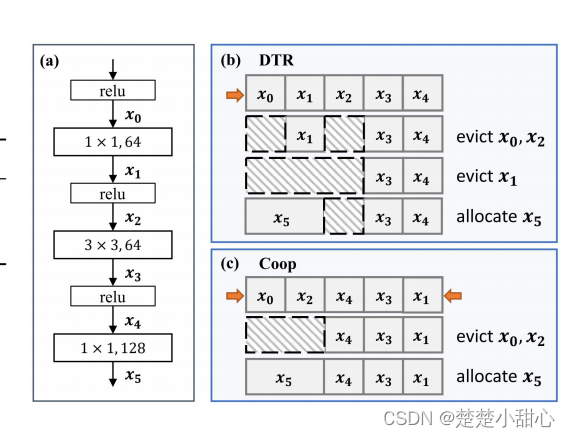
释放的显存不连续,形成的显存碎片,无法容纳新的tensor
例如,新的tensor需要100M的显存,为此释放了两个tensor,但是这两个tensor不是连续的,不能被使用,根据释放机制,就会一直释放下去,直到释放出一段连续可用的显存
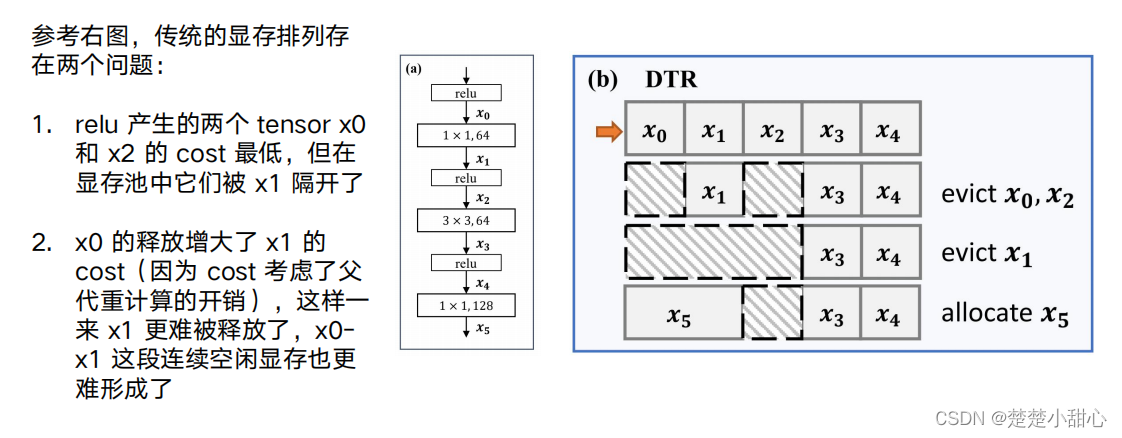
- 在显存池里的排列并非最优,是按照计算顺序排列的
-
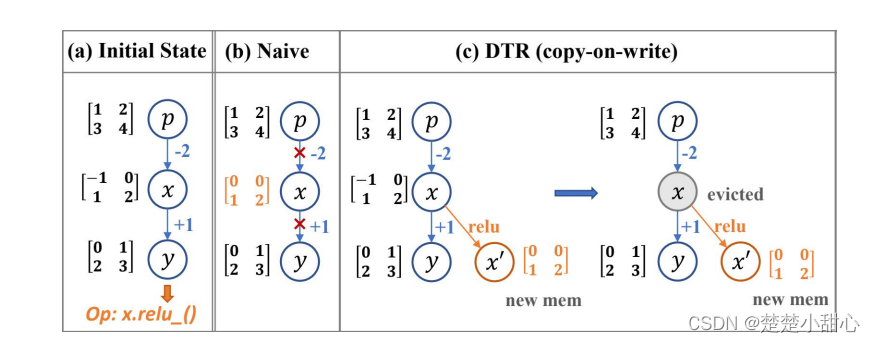
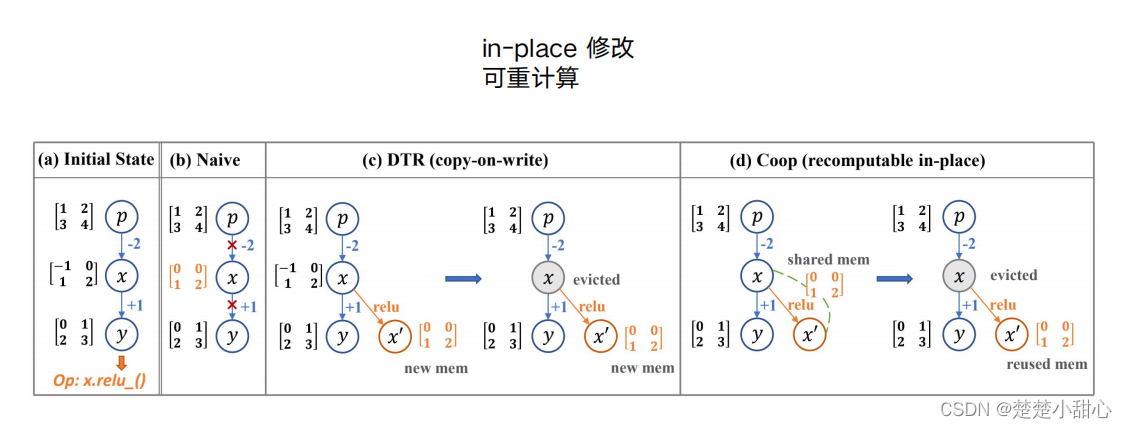
in-place op 失效
重计算实质上把in-place op变成了非in-place op
in-place op:模型权重会被修改利用,以此来节省显存和cache,原地修改会造成后续的值改变。
DTR:模型权重不可被修改,额外申请资源进行计算,生成新的tensor,分散在显存池中,很难形成连续大显存。
Coop
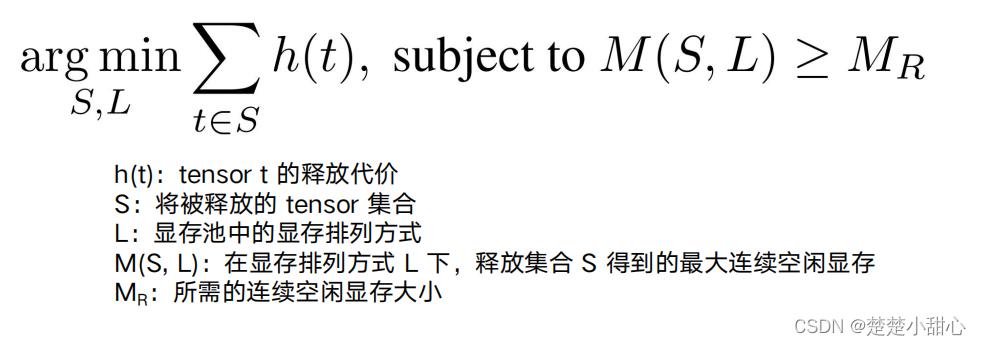
对显存的排列方式进行优化,一次性找出可以生成足够大的连续空闲显存、并且总代价最低的tensor集合。

recomputable in place
对于不再变化的tensor,进行共享存储。
op-guided allocation
根据op进行显存池中位置的分配,相同的放在一起。(原先是按照计算顺序来的)
Layout-aware Eviction
将显存池中空闲显存当做代价为0的tensor。
利用滑动窗口找出代价最小的连续tensor,进行释放。
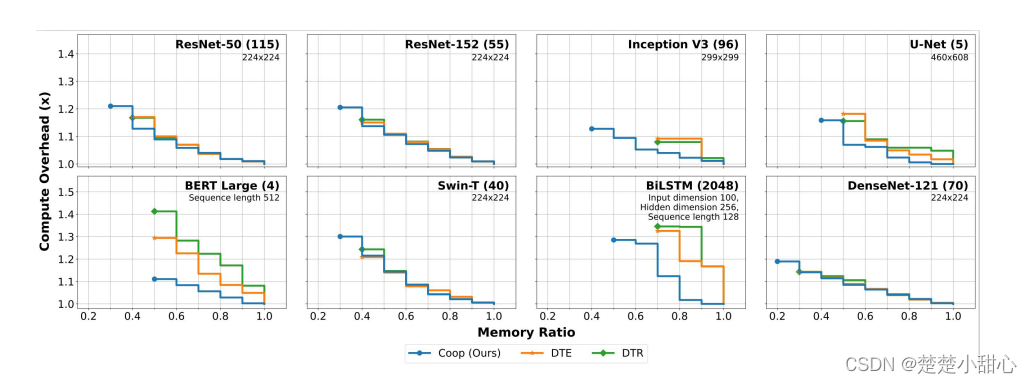
实验效果
消耗的时间
下图是Coop和同样在OneFlow中实现的DTR、DTE策略在八种不同的网络、不同显存阈值下的对比,可以看到Coop均超过了其它两种方法:
横轴为显存,纵轴为时间倍数
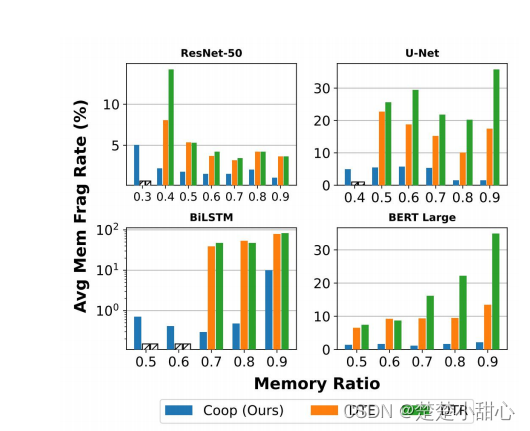
显存碎片率
同时,Coop 将显存碎片率减少了一个量级(注意 BiLSTM 的 y 轴为对数坐标)
在大部分网络中,显存碎片率最低
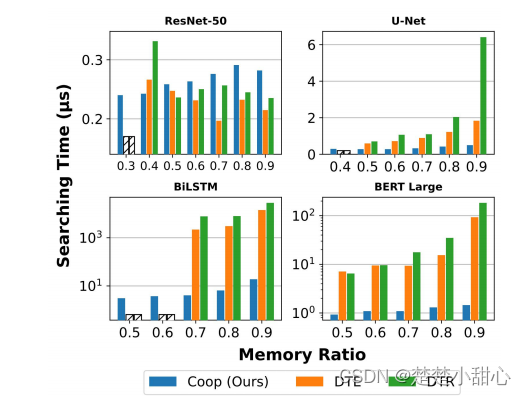
搜索时间
Coop 的搜索过程时间复杂度为 O(N) 而不是 O(N^2)(N 为显存池中的 tensor 个数),在
绝大多数场景下也取得了最快的搜索速度(注意 BiLSTM 和 BERT Large 的 y 轴为对数坐
标)