动态模态分解 (dynamic mode decomposition) 最早是被用来分析流体(例如水流)的动态过程,它可以把复杂的流动过程分解为低秩的时空特征 (low-rank spatiotemporal features),这种方法的强大之处在于它不依赖于动态系统中的任何主方程。作为衍生,动态模态分解可以被用来分析多元时间序列 (multivariate time series),进行短期未来状态预测。
动态模态分解是一种数据驱动的方法,其在描述一些动态过程时具有很多优势,包括:
动态模态分解不依赖于任何给定的动态系统表达式;
不同于奇异值分解,动态模态分解可以做短期状态预测,即模型本身具备预测能力。
本期文章为大家简要介绍该模型的原理。
测试源码:https://github.com/ekmmrs/DMD_sector_rotation
模型表达式
实际上,动态模态分解和我们比较熟悉的向量自回归一样,他们拥有完全一样的数学表达式。具体而言,若多元时间序列是由 M 条时间长度为 T 的时间序列组成,则对于时刻 t , 动态模态分解的表达式为:
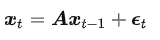
其中,A 表示 Koopman 矩阵,大小为 M x M,当然,在向量自回归里面,我们会称矩阵 A 为系数矩阵 (coefficient matrix)。
在这里,如果令
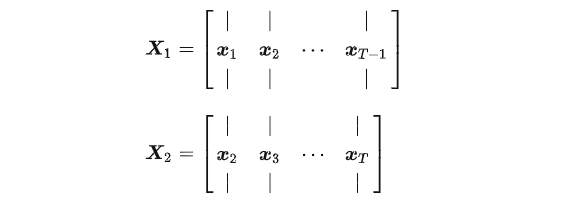
则动态模态分解的表达式可以写成:
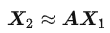
不过与向量自回归不同的是,A 作为动态模态分解中的 Koopman 矩阵时,它可以用一个低秩结构进行逼近。在向量自回归中,如果求解系数矩阵 A ,我们需要对向量自回归的残差平方和做最小化处理,即

模型求解
在动态模态分解中,如果求解 Koopman 矩阵,我们可以采用如下两步:
对矩阵 X1 进行奇异值分解,即
取矩阵 X1 的截断奇异值分解,截断的秩为 r,则可用如下矩阵:

对 Koopman 矩阵 A 进行近似,其中,矩阵  、
、 、
、 分别为 U, V, ∑ 的截断矩阵。
分别为 U, V, ∑ 的截断矩阵。
到这里,我们实际上已经完成了对 Koopman 矩阵 A 的近似求解。如果想借助动态模态分解进行时空特征分析,我们可以对矩阵  进行特征值分解,即
进行特征值分解,即  ,其中,
,其中, 是一个对角矩阵,对角线上面的元素为特征值,而矩阵
是一个对角矩阵,对角线上面的元素为特征值,而矩阵  则由特征向量构成。通常来说,我们可以用特征值和特征向量来分析复杂流动过程的时空特征。
则由特征向量构成。通常来说,我们可以用特征值和特征向量来分析复杂流动过程的时空特征。
实际上,不管是向量自回归还是动态模态分解,它们都具备一定的预测能力。在动态模态分解中,定义

便可以根据  进行短期预测。
进行短期预测。
实验
01
案例代码
import numpy as np
def dmd(X1, X2, rank):
"""Dynamic Mode Decomposition, DMD."""
u, s, v = np.linalg.svd(X1, full_matrices = 0)
A_tilde = u[:, : rank].conj().T @ X2 @ v[: rank, :].conj().T @ np.linalg.inv(np.diag(s[: rank]))
eigval, eigvec = np.linalg.eig(A_tilde)
Phi = X2 @ v[: rank, :].conj().T @ np.linalg.inv(np.diag(s[: rank])) @ eigvec
temp = Phi @ np.diag(eigval) @ (np.linalg.pinv(Phi) @ X1)
return temp.real, eigval, Phi02
实例分析
预测如下矩阵的最后一行,其他5行数据作为训练样本:
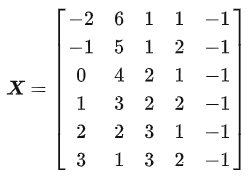
X = np.array([[-2,6,1,1,-1],
[-1,5,1,2,-1],
[0,4,2,1,-1],
[1,3,2,2,-1],
[2,2,3,1,-1],
[3,1,3,2,-1]])
X1 = X[: 4, :].T
X2 = X[1 : 5, :].T
rank = 3
temp, eigval, Phi = dmd(X1, X2, rank)
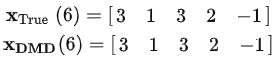
print("矩阵X最后一行的预测值为:")
print((Phi @ np.diag(eigval) @ (np.linalg.pinv(Phi) @ X[4, :])).real)输出结果为:
矩阵X最后一行的预测值为:
[ 3. 1. 3.00000002 1.99999999 -1. ]对比结果:
推荐阅读:
我的2022届互联网校招分享
我的2021总结
浅谈算法岗和开发岗的区别
互联网校招研发薪资汇总
2022届互联网求职现状,金9银10快变成铜9铁10!!
公众号:AI蜗牛车
保持谦逊、保持自律、保持进步
发送【蜗牛】获取一份《手把手AI项目》(AI蜗牛车著)
发送【1222】获取一份不错的leetcode刷题笔记
发送【AI四大名著】获取四本经典AI电子书