作者 | 技述无忌
编辑 | 3D视觉开发者社区
文章目录
1、面阵ToF芯片数据汇总及简要分析
下图是根据近三年各个公司的官网与公开发布的数据整理的相关ToF芯片相关信息与资料,对于IToF则主要整理VGA分辨率的芯片,DToF则主要整理2万点左右的芯片信息。

ToF芯片信息汇总
从上表中,可以看出面阵ToF的几个特点:
- 当前面阵ToF仍然以IToF为主流,但DToF芯片也逐渐增多,究其主要原因应该是IToF可以采用现有的CMOS工艺进行设计与生产,其产业链相对比较成熟;
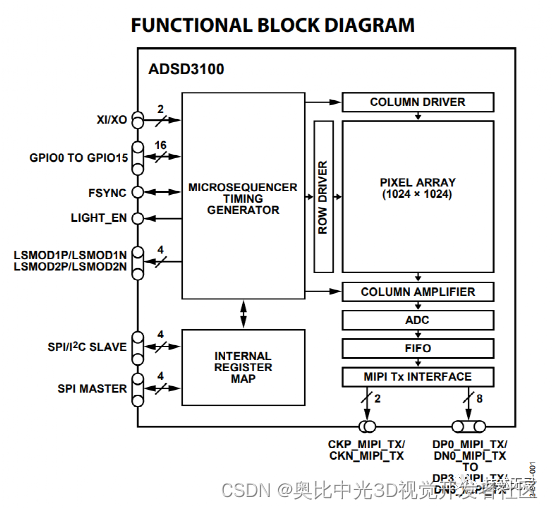
- IToF芯片的分辨率普遍以VGA为主,最高是ADI的ADSD3100达到1MP(可能与微软的Azure kinect的sensor同款),据说Sony也有类似1MP的IToF芯片;
- DToF芯片普遍像素不高,落地商用的最高分辨率是Sony与苹果合作开发的200x160的DToF芯片,灵明光子本月发布的DToF芯片,则是达到了240x160,单从分辨率来看已经略微超过了Sony;
- 国内布局ToF芯片基本都是近年的创业公司;
2、面阵ToF技术发展可能的几个趋势
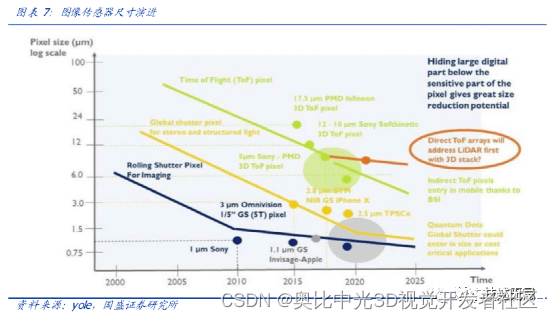
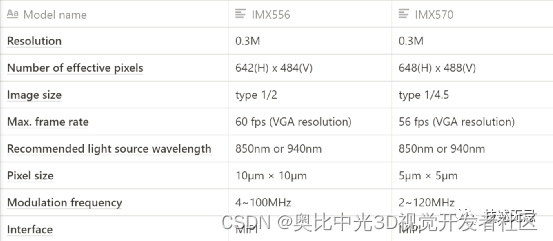
2.1 芯片像元尺寸小型化
为了保证足够的光电探测效率(QE值),目前ToF芯片的pixel size 基本都是7um或者10um;但是如果我们仔细去研究就发现,Sony最新发布的VGA IToF芯片IMX570,同样的分辨率却比上一代尺寸下降了一倍,从10um下调到了5um;对于ADI的1MP的ToF sensor的像素尺寸更是只有3.5um;像素尺寸的变小为大分辨率的ToF芯片的出现提供了基础。也更加满足产品系统应用对于尺寸的需求,为ToF的规模化奠定良好的基础。
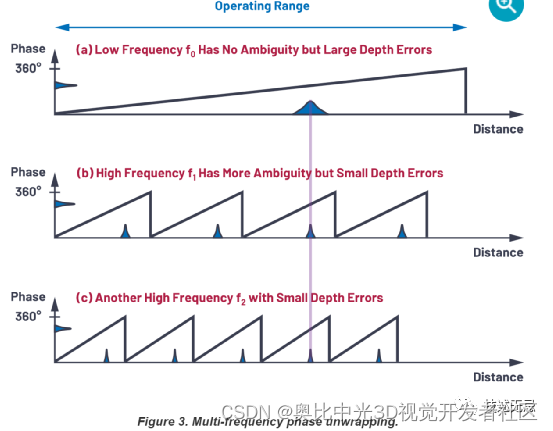
2.2 IToF芯片支持多频化
现在IToF芯片主要支持两种调制,一是PM调制,二是CW调制。但大部分芯片ToF芯片只支持双频调制;双频调制的优势在于对精度、测量距离、系统复杂度之间是一个非常平衡的解决方案;多径干扰是IToF面临的重要问题,解决此问题,一般有几个思路:一是采用局部照明的方式,二是采用多频处理,三是采用机器学习的方案;第一个思路并不太适合,第三个方案一般是依赖后端算法实现,也不适合由IToF芯片解决;因此,采用多频调制解决多径干扰是IToF芯片一种可行的方案。在多频方案中,解算K重多径,需要2k+1个不同频率的探测值。因此,3频可以解决Two-Path多径问题,这也是目前一部分ToF sensor支持调制频率数。
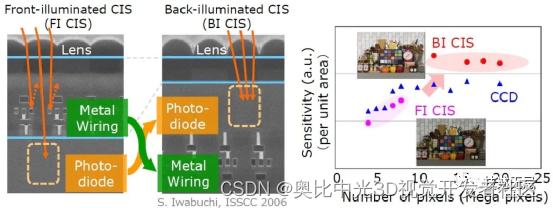
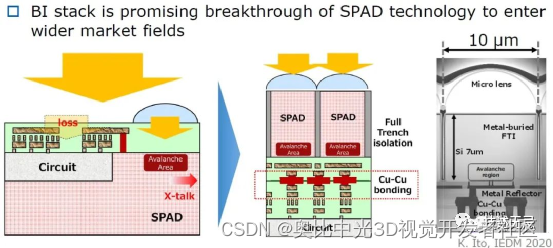
2.3 BSI与3D堆叠工艺成为未来ToF芯片首选
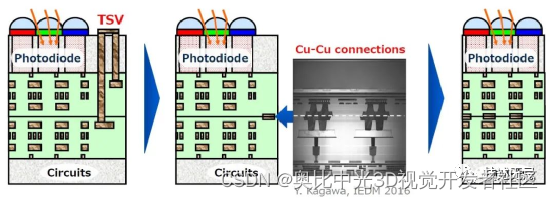
前照式(FSI)CMOS图像传感器和背照式(BSI)CMOS图像传感器横截面对比图。背照式结构可避免金属走线、晶体管的影响,从而增加感光像素的进光量,同时也能抑制光入射角度变化导致感光度下降的问题。即使面对夜景等昏暗场所,也能拍摄流畅、高画质的影像。背照式结构的这一突破,使得CMOS图像传感器在众多专业领域获得青睐,并加速了其对CCD图传感器的取代。此外,背照式结构还进一步推动了堆叠式CMOS图像传感器的发展。
第一款堆叠式CMOS图像传感器采用硅通孔(TSV)技术实现感光像素芯片与逻辑电路芯片的连接,但后来采用Cu-Cu连接代替了TSV,并实现了多点连接,利用Cu-Cu连接替代TSV,Cu-Cu连接是感光像素芯片与逻辑电路芯片通过在各堆叠面上构建的Cu焊盘直接连接的方式。这种连接方式无需穿透感光像素芯片,也不需要专门的连接区域,因此,可以实现CMOS图像传感器的进一步小型化和生产效率的提升。
2021年2月,索尼发布了业界首款采用SPAD像素的堆叠型dToF车载激光雷达LiDAR)。将SPAD像素与测距处理电路以堆叠方式集成在一颗芯片上,从而能够高精度、高速地以15 cm的间隔测量最大300m的距离。
2.4 高分辨率趋势
在ADI的IToF sensor中,其分辨率为1024x1024;而其它的分辨率都较低,面阵DToF的分辨率更低。
- 在Sony、灵明光子发布的DToF中,都在尝试不断提高面阵DToF的分辨率,而且当前其有效点数都小于3万点,在2万点附近,这个分辨率对于3D视觉类的应用还是不足的,因此对于DToF而言,高分辨率的趋势是显而易见的。
- 对于IToF目前VGA的主流分辨率是否可用,个人认为以目前后端算力的发展情况,暂时也基本可以满足应用。但是算力的发展,按照摩尔定律其发展是很快的,随着后端以及边缘算力的增加,整个应用系统对于3D高分辨率的诉求会越来越强烈。
- 2D向着高清晰度发展,对于细节的展示越来越逼真;在AR/VR的应用以及三维模型重建也需要3D的数据越来越精细化,这些都对于3D分辨力有着客观的需求。
2.5 环境干扰抑制
ToF是一种主动发光浿距的技术,其受到很多环境因素的影响;因此无论IToF还是DToF,如何抑制环境因素的干扰都是必须面临的问题。
- 支持多频调制,抑制多径干扰;
- 增加环境光检测,以提升Sensor的信噪比,通过检测当前环境中干扰光的强度,调整Sensor、激光以及算法参数达到抑制环境光干扰的目的;
- 支持随机编码调制,以避免同类ToF激光的干扰;
- 提升耐热性、提高温度适应性、降低功耗等;
3、ToF的市场趋势
提到发展趋势总不能少了市场的支撑,对于市场容量与规模这块这里就不做过多的论述,引用一下Yole Developpement 的数据,2020 年全球 3D 成像和传感市场价值约 68 亿美元,并将在一两年内实现软增长。他们进一步指出,随着汽车和工业等二级市场的腾飞,它的增长将更加强劲,预计到 2026 年将增长到 150 亿美元,复合年增长率 (CAGR) 为 14.5%。报告显示,该市场主要服务于移动和消费者,预计到 2026 年仍将占整个 3D 成像和传感市场的 46%。到 2026 年,汽车和工业加起来将占市场的 22%。

版权声明:本文为作者授权3D视觉开发者社区发布,仅做学术分享,版权归原作者所有,若涉及侵权内容请联系删文。
3D视觉开发者社区是由奥比中光给所有开发者打造的分享与交流平台,旨在将3D视觉技术开放给开发者。平台为开发者提供3D视觉领域免费课程、奥比中光独家资源与专业技术支持。
点击加入3D视觉开发者社区,和开发者们一起讨论分享吧~
也可移步微信关注官方公众号 3D视觉开发者社区 ,获取更多干货知识哦!