作者 | 技述无忌
编辑 | 3D视觉开发者社区
“高度回避者依赖结构势力(角色和资源),不回避者依靠个人能力和别人的尊重(声望):-------《影响力》
1. 景深与弥散圆
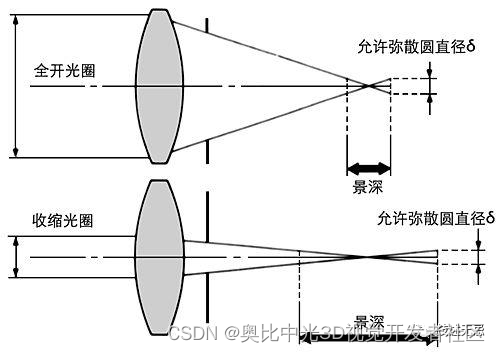
理论上讲,物体上一个无穷小的点发出的同心光束,经过镜头可以在唯一的平面重新聚集成唯一一个无穷小的点,这个重新聚集的点叫做原来那个点的像。通过镜头的同心光束可以在唯一的平面聚集成一点,在这个平面之外的其他平面上这些光线是不能聚集成一个无穷小的点,而是每条光线都会打出一点,而这些点会围成一个圆形的光斑,我们可以把这个光斑叫做弥散圆。

如果弥散圆的直径小于人眼的分辨能力,在一定范围内实际影像产生的模糊是不能辨认的。加之成像芯片上的像元是有尺寸的,并不是无穷小的,所以要得到一个清晰的像,并不需要光线汇聚于一个无穷小的点,只需要弥散圆都在一个像元上,且在人眼分辨能力之下即可。基于以上的说法,我们可以得到一个可以接受的弥散圆直径。我们可以看上面那个立体图,焦点前后有一段距离使得弥散圆的直径在我们所能接受的范围内,这个距离叫做焦深;相应地看前面的平面图,被摄物有一个像距范围,使得弥散圆的直径在我们所能接受的范围内,这个距离范围叫做景深,当被摄物在景深范围内,弥散圆满足要求,这时可以得到一个清晰的像。以焦点为界,焦深分为前焦深和后焦深;而景深分为前景深和后景深。对于固定焦距和拍摄距离的应用,结合前文以及下图可以直观得出使用的光圈越小,景深越大。
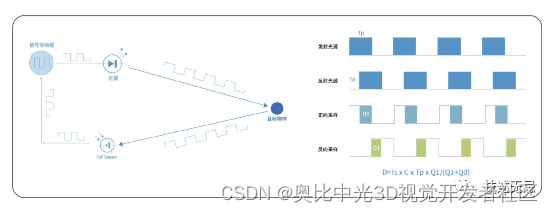
2. 镜头离焦对于ToF深度的影响分析
Sensor平面的像素尺寸大小决定了可容忍的弥散圆的尺寸,绿色的弥散圆是Sensor平面清晰度最高时可容忍的最大弥散圆。当镜头离焦或者其它原因导致弥散圆变大,如下图中红色的弥散圆,图像变得模糊。
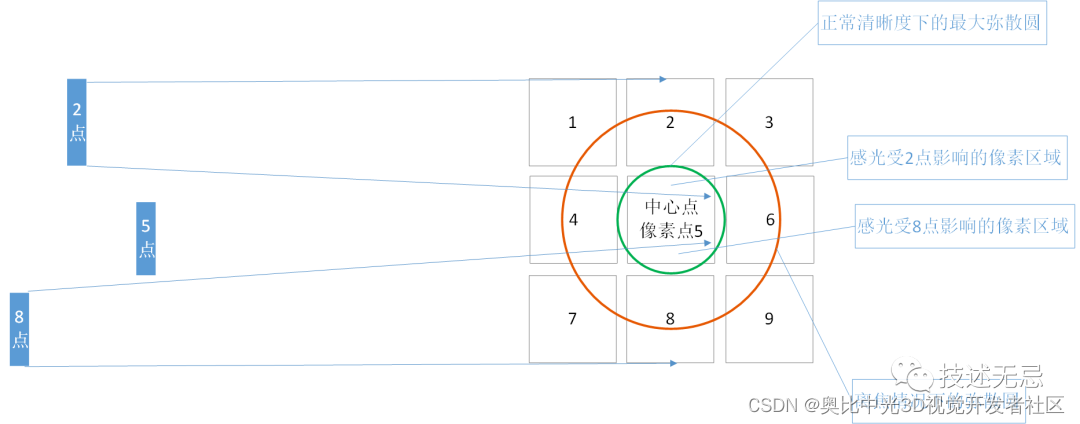
以PM-IToF进行分析:CW-IToF sensor通过采集每一个像素点正反个相位的相位值,由于中心点对应的相位值受到其它像素点对应的目标物的距离影响,因此,中心点获得的相位值是不准确的,可以理解为受到1、2,3、4,、6,7、8、9周围像素点的影响。相当于相位图中含有9条光路的信息。所以其深度必然是9条光路计算出来的一个中间距离值,其精度与模糊成度正相关。对于PM-IToF或者DToF技术来说,也是一样的。
由于其像素通常仅受周边像素的影响,在对平面以及非剧烈变化的物体表面进行测试时,其对于测量的精度影响并不是很直接或者很容易被观测。而在目标场景中的深度距离存在剧烈变化时,在深度边缘的深度会受到更加严重的影响,从而导致深度出平滑或者更多的飞点噪声。
3. 分析结论
- 镜头离焦或者图像模糊对于ToF的深度存在影响;
- 镜头离焦或者图像模糊对于ToF的深度在平面或者变化比较缓的曲面影响不大;
- 镜头离焦或者图像模糊对于ToF的深度在场景目标物体边缘部分的深度值影响比较大,会导致边缘出现更多的飞点或者非正常的平滑效果。
版权声明:本文为奥比中光3D视觉开发者社区授权转载发布,仅做学术分享,版权归原作者所有,若涉及侵权内容请联系删文。
3D视觉开发者社区是由奥比中光给所有开发者打造的分享与交流平台,旨在将3D视觉技术开放给开发者。平台为开发者提供3D视觉领域免费课程、奥比中光独家资源与专业技术支持。
点击加入3D视觉开发者社区,和开发者们一起讨论分享吧~
也可以移步微信关注官方公众号 3D视觉开发者社区 ,获取更多干货知识哦~