1. 所谓线程就是“一个进程内部的一个控制序列”。也就是一个进程内部的并行的基础!
2. Linux进程可以看成只有一个控制线程:
一个进程在同一时刻只做一件事情。有了多个控制线程以后,
在程序设计时可以把进程设计成在同一时刻能够做不止一件事,
每个线程处理各只独立的任务。即所谓并行!
3. 线程的优点:
(1)通过为每种事件类型的处理分配单独的线程,能够简化处理异步时间的代码。
(2)多个线程可以自动共享相同的存储地址空间和文件描述符。
(3)有些问题可以通过将其分解从而改善整个程序的吞吐量。
(4)交互的程序可以通过使用多线程实现相应时间的改善,多线程可以把程序中
处理用户输入输出的部分与其它部分分开。
4. 线程的缺点:
线程也有不足之处。编写多线程程序需要更全面更深入的思考。
在一个多线程程序里,因时间分配上的细微偏差或者因共享了不该共享的
变量而造成不良影响的可能性是很大的。调试一个多线程程序也
比调试一个单线程程序困难得多。
5. 线程标识:
我们已经知道进程有进程ID就是pid_t,那么线程也是有自己的ID的pthread_t数据类型!
注意:实现的时候可以用一个结构来代表pthread_t数据类型,所以可以移植的操作系统
不能把它作为整数处理。因此必须使用函数来对来对两个线程ID进行比较。
6. pthread_cancel:取消同一进程中的其他线程(注意是取消其他线程)
intpthread_cancel(pthread_t tid);
若成功返回0,否则返回错误编号。
注意:pthread_cancel并不等待线程终止,它仅仅提出请求。是否真的执行还看目标线程的
state和type的设置了!
7. pthread_cleanup_push 和pthread_cleanup_pop:线程清理处理程序
voidpthread_cleanup_push( void ( * rtn ) ( void * ),void *arg );
voidpthread_cleanup_pop( int exe );
参数:
rtn: 处理程序入口地址
arg:传递给处理函数的参数
线程可以安排它退出时需要调用的函数,这样的函数称为线程清理处理程序,线程可以建立多个清理处理程序。
注意:此处是使用栈保存的,所以是先进后处理原则!
如果线程是通过从启动例程中返回而终止的,它的处理程序就不会调用。
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
ATTENTION:
pthread_cleanup_push注册一个回调函数,如果你的线程在对应的pthread_cleanup_pop
之前异常退出(return是正常退出,其他是异常),那么系统就会执行这个回调函数(回调函
数要做什么你自己决定)。但是如果在pthread_cleanup_pop之前没有异常退出,
pthread_cleanup_pop就把对应的回调函数取消了,
所以请注意:
只有在“清理函数”的设置和取消之间有异常的退出,才会调用我们设置的“清理函数”。
否则是不会输出的!
一般的触发条件是:在之间有pthread_exit(非正常退出);或者有取消点时候!
关于“取消点” (cancellation point ):
例如执行下面代码:
printf("sleep\n");
sleep(10);
printf("wake \n");
在sleep函数中,线程睡眠,结果收到cancel信号,这时候线程从sleep中醒来,但是线程不会立刻退出。
>>>>>:
函数:pthread_testcancel():
描述:函数在运行的线程中创建一个取消点,如果cancellation无效则此函数不起作用。
pthread的建议是:如果一个函数是阻塞的,那么你必须在这个函数前后建立 “ 取消点 ”, 比如:
printf("sleep\n");
pthread_testcancel();
sleep(10);
pthread_testcancel();
printf("wake \n");
在执行到pthread_testcancel的位置时,线程才可能响应cancel退出进程。
对于一些函数来说本身就是有cancellation point 的,那么可以不管,但是大部分还是没有的,
所以要使用pthread_testcancel来设置一个取消点,那么也并不是对于所有的函数都是有效的,
对于有延时的函数才是有效的,更清楚的说是有时间让pthread_cancel响应才是OK的!
附加:
POSIX中的函数cancellation点的:
pthread_join
pthread_cond_wait
thread_cond_timewait
pthread_testcancel
sem_wait
sigwait 都是cancellation点.
下面的这些系统函数也是cancellation点:
accept
fcntl
open
read
write
lseek
close
send
sendmsg
sendto
connect
recv
recvfrom
recvmsg
system
tcdrain
fsync
msync
pause
wait
waitpid
nanosleep
其它的一些函数如果调用了上面的函数, 那么, 它们也是cancellation点.
intpthread_setcancelstate (int STATE, int *OLDSTATE);
用于允许或禁止处理cancellation,
STATE可以是:PTHREAD_CANCEL_ENABLE, PTHREAD_CANCEL_DISABLE
intpthread_setcanceltype (int TYPE, int *OLDTYPE);
设置如何处理cancellation, 异步的还是推迟的.
TYPE可以是:PTHREAD_CANCEL_ASYNCHRONOUS, PTHREAD_CANCEL_DEFERRED
>>>>
摘录:http://blogt.chinaunix.net/space.php?uid=23381466&do=blog&id=58787
什么是取消点(cancelation point)?
资料中说,根据POSIX标准,pthread_join()、pthread_testcancel()、pthread_cond_wait()、
pthread_cond_timedwait()、sem_wait()、sigwait()等函数以及read()、write()等会引起阻塞
的系统调用都是Cancelation-point。而其他pthread函数都不会引起 Cancelation动作。但
是pthread_cancel的手册页声称,由于LinuxThread库与C库结合得不好,因而目前C库函
数都不是Cancelation-point;但CANCEL信号会使线程从阻塞的系统调用中退出,并置
EINTR错误码,因此可以在需要作为Cancelation-point的系统调用前后调用pthread_testcancel(),
从而达到POSIX标准所要求的目标,即如下代码段:
pthread_testcancel();
retcode =read(fd, buffer, length);
pthread_testcancel();
我发现,对于C库函数来说,几乎可以使线程挂起的函数都会响应CANCEL信号,终止线程,
包括sleep、delay等延时函数。
本篇文章来源于 Linux公社网站(www.linuxidc.com) 原文链接:( 一 ) 基础篇 - Linux 多线程编程( POSIX )_Linux编程_Linux公社-Linux系统门户网站
8、示例代码:
/*
* ThreadCancel.c
*
* Created on: Aug 17, 2013
* Author: root
*/
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <sys/types.h>
#include <pthread.h>
#include <errno.h>
#define NUM_THREADS 5
void* search(void *);
void print_it(void*);
pthread_t threads[NUM_THREADS];
pthread_mutex_t lock;
int tries;
int started;
int main(){
int i, pid;
pid = getpid();
printf("Search for the number=%d...\n", pid);
pthread_mutex_init(&lock,NULL);
for(started=0;started<NUM_THREADS; started++){
pthread_create(&threads[started], NULL, search, (void*)pid);
}
for(i=0; i<NUM_THREADS; i++){
pthread_join(threads[i], NULL);
}
printf("It took %d tries to find the number.\n", tries);
return 0;
}
void print_it(void * arg){
int *try = (int *)arg;
pthread_t tid;
tid = pthread_self();
printf("Thread %lx was canceled on its %d try.\n", tid, *try);
}
void * search(void * arg){
int num = (int)arg;
int i,j,ntries;
pthread_t tid;
tid = pthread_self();
while(pthread_mutex_trylock(&lock) == EBUSY){
pthread_testcancel(); //thread may be canceled and call cancel function handler !
}
printf("current thread tid:%lx.\n", tid);
srand((int)tid);
printf("current thread tid:%lx, after srand method.\n", tid);
i = rand() & 0xFFFFFF;
pthread_mutex_unlock(&lock);
ntries = 0;
pthread_setcancelstate(PTHREAD_CANCEL_ENABLE, NULL);
pthread_setcanceltype(PTHREAD_CANCEL_DEFERRED, NULL);
while(started < NUM_THREADS){
sched_yield();
}
pthread_cleanup_push(print_it, (void*)&ntries);
while(1){
i = (i+1) & 0xffffff;
ntries++;
if(num == i){
while(pthread_mutex_trylock(&lock) == EBUSY){
printf("Thread %lx found the number! But not get lock!\n", tid);
pthread_testcancel();
}
tries = ntries;
printf("Thread %lx found the number!\n", tid);
for(j=0;j<NUM_THREADS;j++){
if(threads[j] != tid){
pthread_cancel(threads[j]);
}
}
break;
}
if(ntries %100 ==0){
pthread_testcancel();
}
}
pthread_cleanup_pop(0);
return ((void*)0);
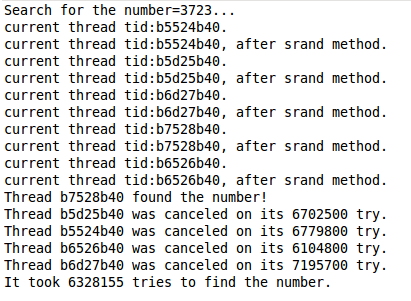
}因为是多线程运行,所以运行结果可能有好几个,运行结果(一):
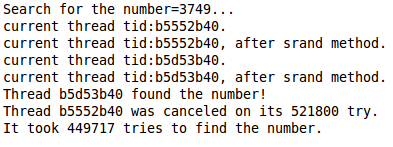
运行结果(二):
转载:(转)Linux 多线程编程---pthread_testcancel()等讲解 - wangle100 - 博客园