开发环境
Windows7/10 x64,VS2019,Qt5.12.11 x64,OpenCV4.5.5 x64
LED数码管贴合软件的总体目标:
是控制自动化设备,把LED线路板精准得贴合(套入)塑料盒,精度在10个丝左右。
LED数码管贴合软件的详细功能列表:
1、大视野畸变标定算法
2、手眼标定算法
3、上和下两个相机的贴合对位算法(旋转、平移的仿射变换,旋转中心的计算)
4、图像预处理,模板匹配
5、运动控制,涉及20个轴的电机控制
6、模板文件管理,日志

软件介绍
1、主界面
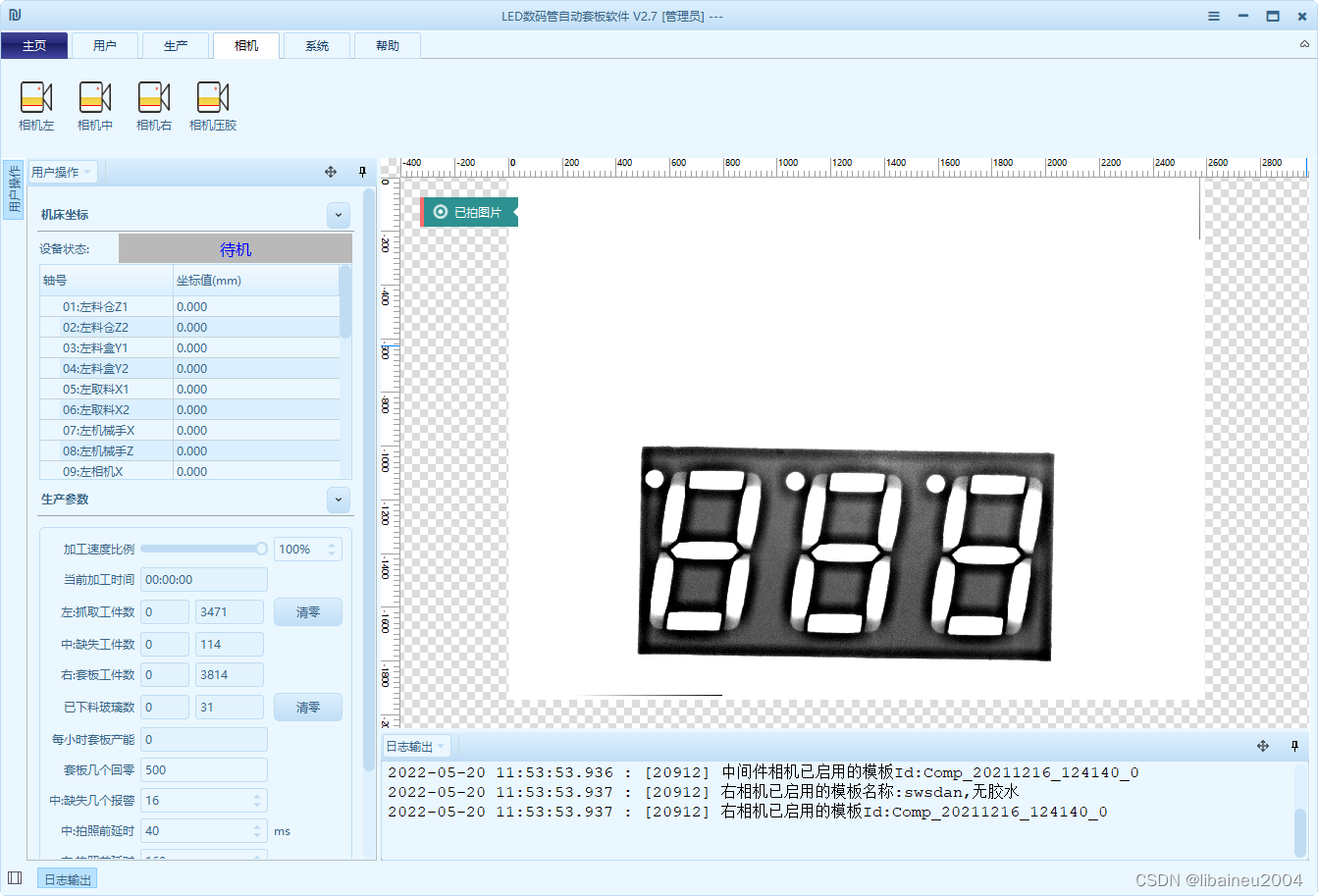
项目使用了4个相机
相机A负责把线路板送到工位1
相机B负责在工位1,拍照线路板
相机C负责在工位2,拍照塑料盒
双相机B与C组合起来,可以实现贴合对位
相机D另有其他用途

2、畸变标定
准备一张菲林板,里面都是圆点
关于畸变标定,详情见我的另一篇博文
https://libaineu2004.blog.csdn.net/article/details/119360779

3、手眼标定(旋转中心的计算)
9点标定,详情参见我的另一篇博文
https://libaineu2004.blog.csdn.net/article/details/109616449

机械手带旋转轴,先做9点标定,后做旋转中心的标定计算
旋转标定,详情见我的另一篇博文
https://libaineu2004.blog.csdn.net/article/details/112277095


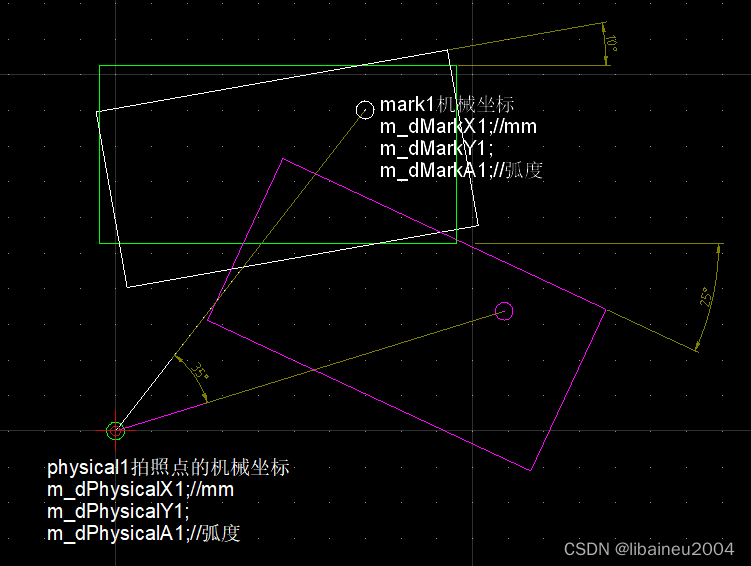
4、上下相机的贴合对位
上下双相机定位贴合的原理,请参考热心网友的分享:
http://www.ihalcon.com/read-14507.html
http://www.ihalcon.com/read-14735.html

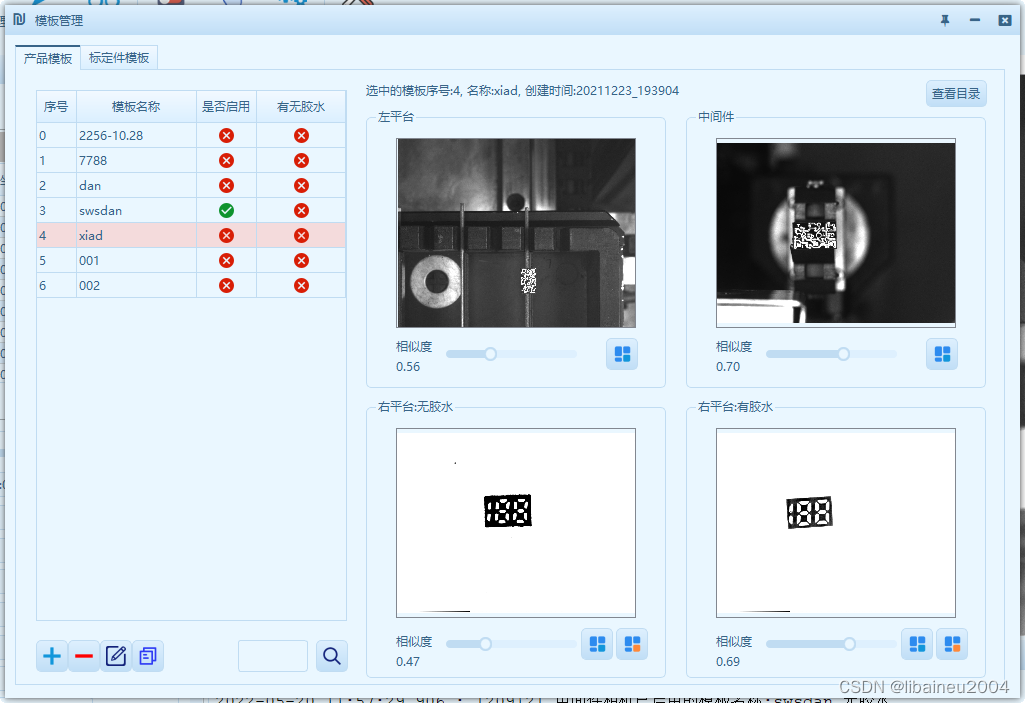
5、模板的管理