1、内容简介
略
2、内容说明
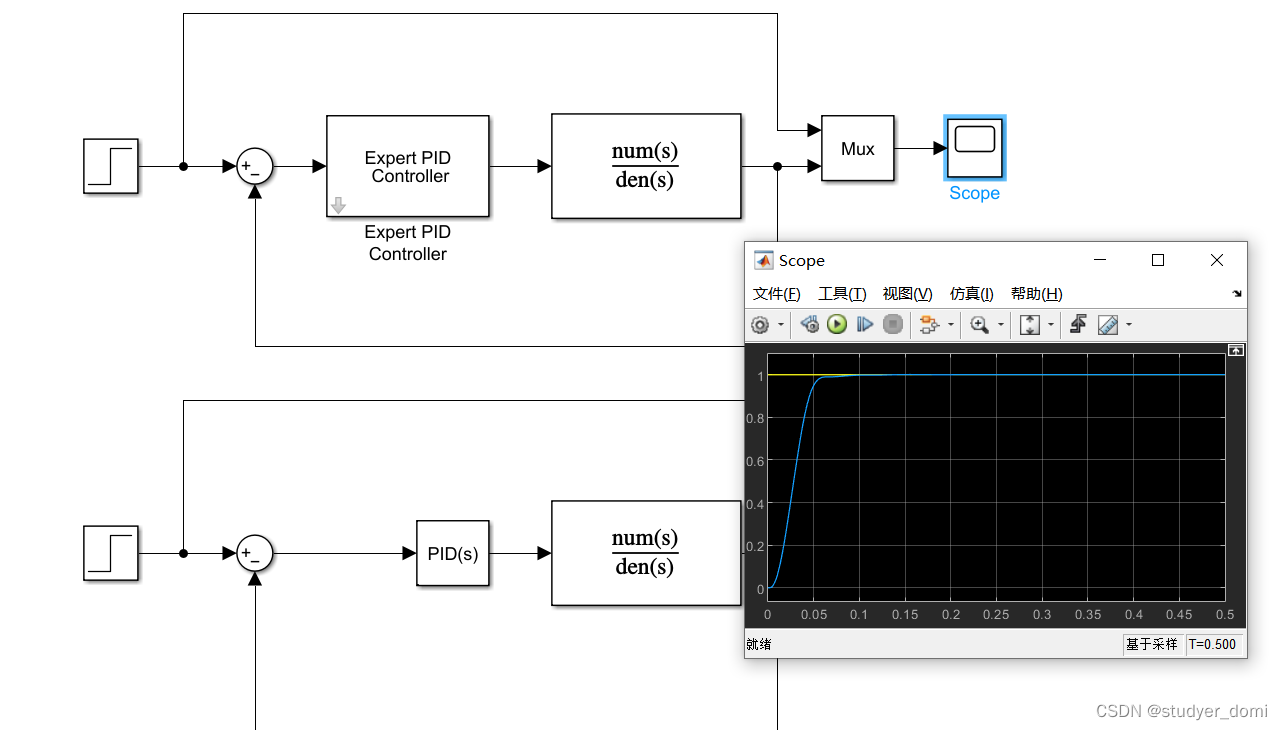
专家PID控制就是基于被控对象和控制规律的各种知识,而不需要知道被控对象的精确模型,利用专家经验来设计PID参数。
3、仿真分析
%Expert PID Controller
clear all;
close all;
ts=0.001;
sys=tf(5.235e005,[1,87.35,1.047e004,0]);
dsys=c2d(sys,ts,'z');
[num,den]=tfdata(dsys,'v');
u_1=0.0;u_2=0.0;u_3=0.0;
y_1=0;y_2=0;y_3=0;
x=[0,0,0]';
x2_1=0;
kp=0.6;
ki=0.03;
kd=0.01;
Kp=0.6;
Ki=0.03;
Kd=0.01;
error_1=0;
for k=1:1:200
time(k)=k;
rin(k)=1.0; %Tracing Jieyue Signal
u(k)=kp*x(1)+kd*x(2)+ki*x(3); %PID Controller
%Expert control rule
if abs(x(1))>0.8 %Rule1:Unclosed control firstly
u(k)=0.45;
elseif abs(x(1))>0.40
u(k)=0.40;
elseif abs(x(1))>0.20
u(k)=0.12;
elseif abs(x(1))>0.01
u(k)=0.10;
end
if x(1)*x(2)>0|(x(2)==0) %Rule2
if abs(x(1))>=0.05
u(k)=u_1+2*kp*x(1);
else
u(k)=u_1+0.4*kp*x(1);
end
end
if (x(1)*x(2)<0&x(2)*x2_1>0)|(x(1)==0) %Rule3
u(k)=u(k);
end
if x(1)*x(2)<0&x(2)*x2_1<0 %Rule4
if abs(x(1))>=0.05
u(k)=u_1+2*kp*error_1;
else
u(k)=u_1+0.6*kp*error_1;
end
end
if abs(x(1))<=0.001 %Rule5:Integration separation PI control
u(k)=0.5*x(1)+0.010*x(3);
end
%Restricting the output of controller
if u(k)>=10
u(k)=10;
end
if u(k)<=-10
u(k)=-10;
end
%Linear model
yout(k)=-den(2)*y_1-den(3)*y_2-den(4)*y_3+num(1)*u(k)+num(2)*u_1+num(3)*u_2+num(4)*u_3;
error(k)=rin(k)-yout(k);
%----------Return of PID parameters------------%
u_3=u_2;u_2=u_1;u_1=u(k);
y_3=y_2;y_2=y_1;y_1=yout(k);
x(1)=error(k); % Calculating P
x2_1=x(2);
x(2)=(error(k)-error_1)/ts; % Calculating D
x(3)=x(3)+error(k)*ts; % Calculating I
error_1=error(k);
end
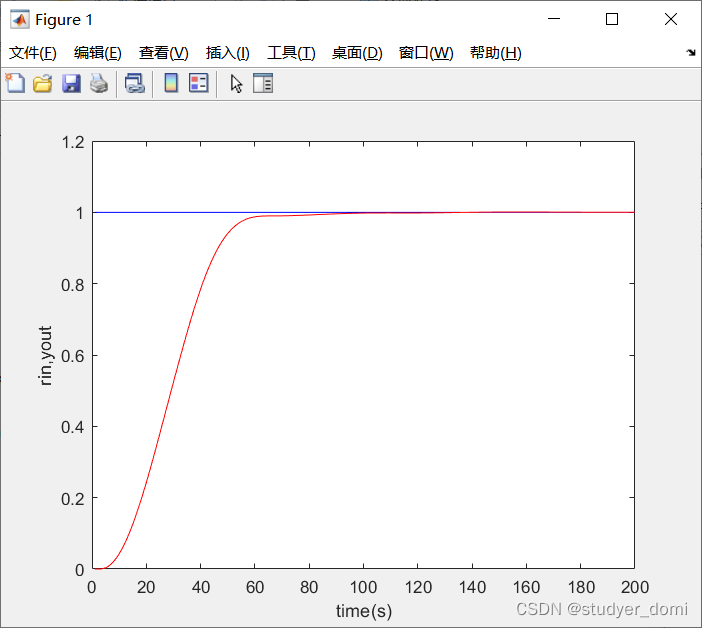
figure(1);
plot(time,rin,'b',time,yout,'r');
xlabel('time(s)');ylabel('rin,yout');
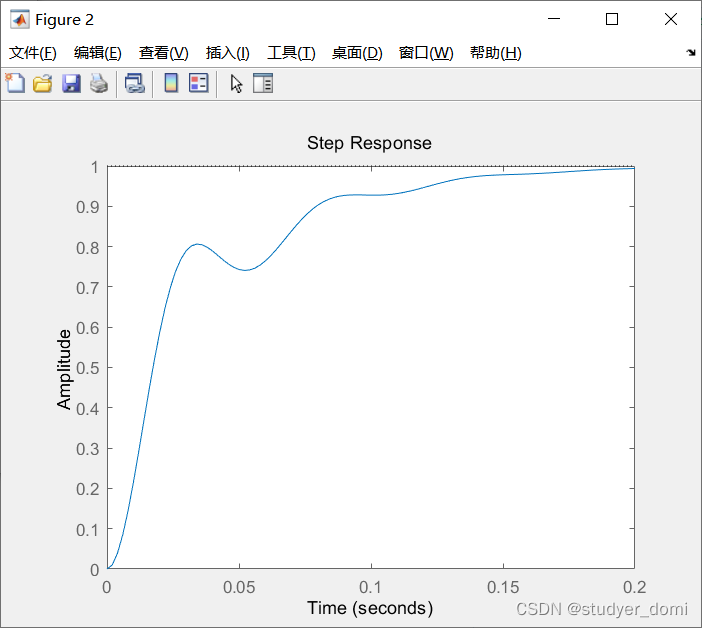
sys=tf(5.235e005,[1,87.35,1.047e004,0]);
PID = tf([kd kp ki],[1 0]);
sys_1 = feedback(sys*PID,1);
figure
step(sys_1,200*ts)
% figure(2);
% plot(time,rin-yout,'r');
% xlabel('time(s)');ylabel('error');
4、参考论文
略