这才是单片机4*4矩阵键盘控制数码管最简单的写法

///插播一条:我自己在今年年初录制了一套还比较系统的入门单片机教程,想要的同学找我拿就行了免費的,私信我就可以哦~点我头像黑色字体加我地球呺也能领取哦。最近比较闲,带做毕设,带学生参加省级或以上比赛///
第一次写,也算是对我研究了几天的代码做一个总结
程序基于AT89S51芯片,两个573锁存器(控制段选位选)
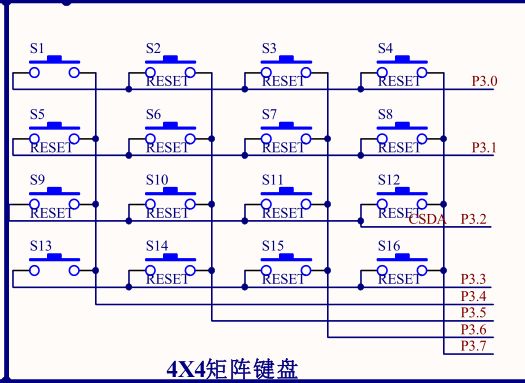
P3口接矩阵键盘,其中P3.0~P3.3接行线,P3.4~P3.7接列线,P0口接共阴极7段数码管。
反转法的原理:
反转法就是通过给单片机的端口赋值两次,最后得出所按键的值的一种算法。
给P3口赋值0x0f,即00001111,假设0键按下了,则这时P3口的实际值为00001110;
给P3口再赋值0xf0,即11110000,如果0键按下了,则这时P3口的实际值为11100000;
通过这两次P3口的实际值相加得11101110,即0xee。
由此我们便得到了按下0键时所对应的数值0xee,以此类推可得出其他15个按键对应的数值,有了这种对应关系,矩阵键盘编程问题也就解决了,也就是程序的算法已经有了。
(上述方法来源于网络)
好了下面直接进入程序
#include //头文件
#define uchar unsigned char //宏定义
#define uint unsigned int
uchar key,n,i; //定义变量
uchar code table[]={0xee,0xde,0xbe,0x7e,0xed,0xdd,0xbd,0x7d,0xeb,0xdb,0xbb,0x7b,0xe7,0xd7,0xb7,0x77}; //反转法矩阵键盘的各个按键的计算值
uchar code yin[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71}; //共阴极数码管显示0~F
void delay(uint i) //延时函数
{
while(i--);
}
void keyscan()
{
uchar l,h,i; //定义局部变量,用l得出低4位的值,用h得出高4位的值
P3=0x0f; //给P3赋值00001111
l=P3&0x0f;
if(l!=0x0f)
{
delay(100); //延迟后再检测
P3=0x0f;
l=P3&0x0f;
if(l!=0x0f)
{
h=P3&0xf0; //若有键按下,得出高四位的值
P3=0xf0; //给P3赋值11110000
h=P3&0xf0; //若有键按下,得出低四位的值
key=l+h; //高4位的值与低4位的值相加
for(i=0;i
{
if(key==table[i]) //通过查表得出n的值
n=i;
}
}
}
}
void main()
{
while(1)
{
keyscan();
for(i=0;i //送入位选信号控制数码管
{
P2_6=1;P2_7=0;
P0=yin[n];
P2_6=0;P2_7=1;
switch(i)
{
case 0:P0=0xfe;break;
case 1:P0=0xfd;break;
case 2:P0=0xfb;break;
case 3:P0=0xf7;break;
case 4:P0=0xef;break;
case 5:P0=0xdf;break;
default:break;
}
P2_6=0;P2_7=0;
delay(100);
}
}
}