实验三:圆的生成算法
3.1实验目的
(1)了解DDA算法、中点画圆法、Bresenham算法
(2)掌握VC++中CDC类的用法
3.2实验内容
(1)类的编写
(2)完成DDA算法、中点画圆法、Bresenham算法
3.3算法思路
在平面解析几何中,圆的方程可以描述为(x–x0)2+(y–y0)2=R2,其中(x0,y0)是圆心坐标,R是圆的半径,特别的,当(x0,y0)就是坐标中心点时,圆方程可以简化为x2+y2=R2。在计算机图形学中,圆和直线一样,也存在点阵输出设备上显示或输出的问题,因此也需要一套光栅扫描转换算法。为了简化,我们先考虑圆心在原点的圆的生成,对于中心不是原点的圆,可以通过坐标的平移变换获得相应位置的圆。
在进行扫描转换之前,需要了解一个圆的特性,就是圆的八分对成性。如下图所示:
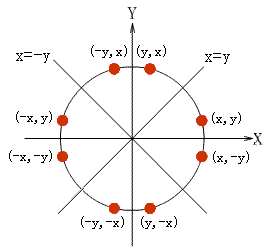 圆心位于原点的圆有四条对称轴x=0、y=0、x=y和x=-y,若已知圆弧上一点P(x,y),就可以得到其关于四条对称轴的七个对称点:(x,-y)、(-x,y)、(-x,-y)、(y,x)、(y,-x)、(-y,x)、(-y,-x),这种性质称为八分对称性。因此只要能画出八分之一的圆弧,就可以利用对称性的原理得到整个圆。
圆心位于原点的圆有四条对称轴x=0、y=0、x=y和x=-y,若已知圆弧上一点P(x,y),就可以得到其关于四条对称轴的七个对称点:(x,-y)、(-x,y)、(-x,-y)、(y,x)、(y,-x)、(-y,x)、(-y,-x),这种性质称为八分对称性。因此只要能画出八分之一的圆弧,就可以利用对称性的原理得到整个圆。
有几种较容易的方法可以得到圆的扫描转换,首先介绍一下直角坐标法。已知圆方程:x2+y2=R2,若取x作为自变量,解出y。
在生成圆时先扫描转换四分之一的圆周,让自变量x从0到R以单位步长增加,在每一步时可解出y,然后调用画点函数即可逐点画出圆。但这样做,由于有乘方和平方根运算,并且都是浮点运算,算法效率不高。而且当x接近R值时(圆心在原点),在圆周上的点(R,0)附近,由于圆的斜率趋于无穷大,因浮点数取整需要四舍五入的缘故,使得圆周上有较大的间隙。接下来介绍一下极坐标法,假设直角坐标系上圆弧上一点P(x,y)与x轴的夹角是θ,则圆的极坐标方程为:
x=Rcosθ
y=Rsinθ
生成圆是利用圆的八分对称性,使自变量θ的取值范围为(0,45°)就可以画出整圆。
(1)角度数值微分法(DDA法):
直角坐标系的圆的参数方程为:
{█(x=x0+Rcosθ@y=y0+Rsinθ)┤
由上式导出
x-xc=-Rsinθdθ
y-yc=Rcosθdθ
当x-xc从-r到r做加1递增时,就可以求出对应的圆周点的y坐标。但是这样求出的圆周上的点是不均匀的,| x-xc | 越大,对应生成圆周点之间的圆周距离也就越长。因此,所生成的圆不美观。
(2)中点画圆法:
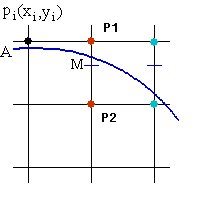
考虑圆心在原点,半径为R的圆在第一象限内的八分之一圆弧,从点(0,R)到点(R/,R/)顺时针方向确定这段圆弧。假定某点Pi(xi,yi)已经是该圆弧上最接近实际圆弧的点,那么Pi的下一个点只可能是正右方的P1或右下方的P2两者之一,如下图所示:
 构造判别函数:
构造判别函数:
F(x,y)=x2+y2–R2
当F(x,y)=0,表示点在圆上,当F(x,y)>0,表示点在圆外,当F(x,y)<0,表示点在圆内。如果M是P1和P2的中点,则M的坐标是(xi+1,yi–0.5),当F(xi+1,yi–0.5)<0时,M点在圆内,说明P1点离实际圆弧更近,应该取P1作为圆的下一个点。同理分析,当F(xi+1,yi–0.5)>0时,P2离实际圆弧更近,应取P2作为下一个点。当F(xi+1,yi–0.5)=0时,P1和P2都可以作为圆的下一个点,算法约定取P2作为下一个点。
(3)Bresenham画圆算法:
如果能将判别式规约到整数运算,则可以简化计算,提高效率。于是人们针对中点画圆法进行了多种改进,其中一种方式是将d的初始值由1.25–R改成1–R,考虑到圆的半径R总是大于2,因此这个修改不会响d的初始值的符号,同时可以避免浮点运算。还有一种方法是将d的计算放大两倍,同时将初始值改成3–2R,这样避免了浮点运算,乘二运算也可以用移位快速代替,采用3–2R为初始值的改进算法,又称为Bresenham算法。
3.4流程图
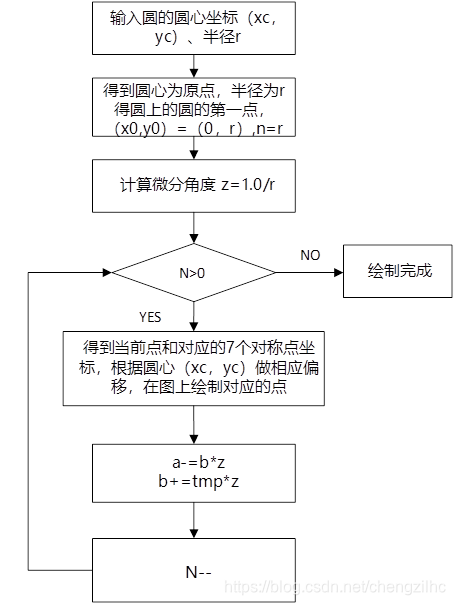
(1)角度数值微分法(DDA法):
 (2)中点画圆法:
(2)中点画圆法:
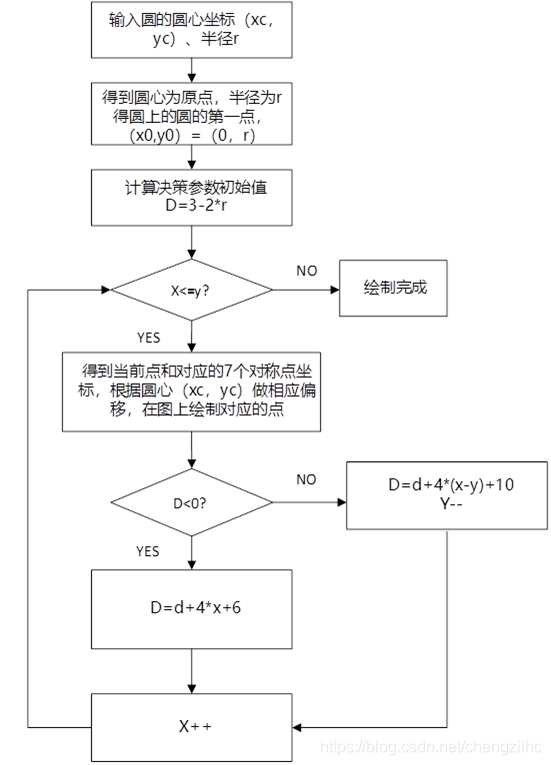
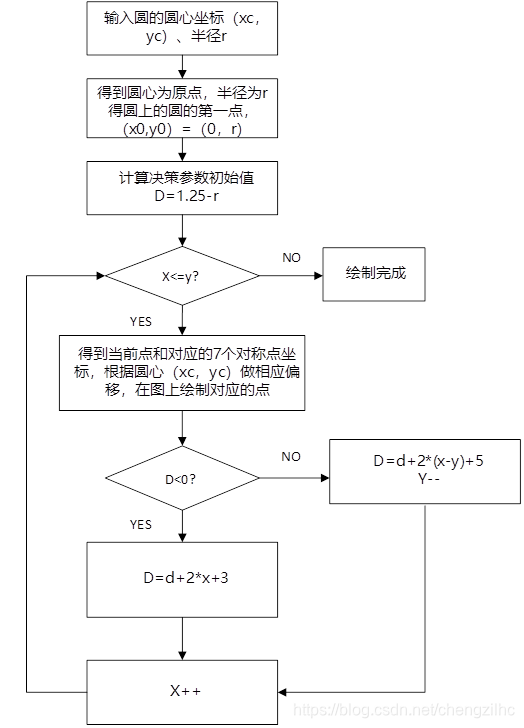 (3)Bresenham画圆算法:
(3)Bresenham画圆算法:
3.5实验步骤
(1)角度数值微分法(DDA法):
直角坐标系的圆的参数方程为:
{█(x=x0+Rcosθ@y=y0+Rsinθ)┤
由上式导出
x-xc=-Rsinθdθ
y-yc=Rcosθdθ
推导:
xn+1=xn-(yn-y0)dθ
yn+1=yn-(xn-x0)dθ
(2)中点画圆法:
1)构造判别函数:F(x,y)=x2+y2–R2。
当F(x,y)=0,表示点在圆上,当F(x,y)>0,表示点在圆外,当F(x,y)<0,表示点在圆内。
如果M是P1和P2的中点,则M的坐标是(xi+1,yi–0.5),当F(xi+1,yi–0.5)<0时,M点在圆内,说明P1点离实际圆弧更近,应该取P1作为圆的下一个点。
同理分析,当F(xi+1,yi–0.5)>0时,P2离实际圆弧更近,应取P2作为下一个点。当F(xi+1,yi–0.5)=0时,P1和P2都可以作为圆的下一个点,算法约定取P2作为下一个点。
2)将M点坐标(xi+1,yi–0.5)带入判别函数F(x,y),得到判别式d:
d=F(xi+1,yi–0.5)=(xi+1)2+(yi–0.5)2–R2
3)若d<0,则取P1为下一个点,此时P1的下一个点的判别式为:
d’=F(xi+2,yi–0.5)=(xi+2)2+(yi–0.5)2–R2
展开后将d带入可得到判别式的递推关系:
d’=d+2xi+3
若d>0,则取P2为下一个点,此时P2的下一个点的判别式为:
d’=F(xi+2,yi–1.5)=(xi+2)2+(yi–1.5)2–R2
展开后将d带入可得到判别式的递推关系:
d’=d+2(xi-yi)+5
4)特别的,在第一个象限的第一个点(0,R)时,可以推倒出判别式d的初始值d0:
d0=F(1,R–0.5)=1–(R–0.5)2–R2=1.25-R
考虑到圆心不在原点的情况,需要对计算出来的坐标进行平移。
(3)Bresenham画圆算法:
1)构造判别函数:F(x,y)=x2+y2–R2。
当F(x,y)=0,表示点在圆上,当F(x,y)>0,表示点在圆外,当F(x,y)<0,表示点在圆内。
如果M是P1和P2的中点,则M的坐标是(xi+1,yi–0.5),当F(xi+1,yi–0.5)<0时,M点在圆内,说明P1点离实际圆弧更近,应该取P1作为圆的下一个点。
同理分析,当F(xi+1,yi–0.5)>0时,P2离实际圆弧更近,应取P2作为下一个点。当F(xi+1,yi–0.5)=0时,P1和P2都可以作为圆的下一个点,算法约定取P2作为下一个点。
2)将M点坐标(xi+1,yi–0.5)带入判别函数F(x,y),得到判别式d:
d=F(xi+1,yi–0.5)=(xi+1)2+(yi–0.5)2–R2
3)若d<0,则取P1为下一个点,此时P1的下一个点的判别式为:
d’=F(xi+2,yi–0.5)=(xi+2)2+(yi–0.5)2–R2
展开后将d带入可得到判别式的递推关系:
d’=d+4xi+6
若d>0,则取P2为下一个点,此时P2的下一个点的判别式为:
d’=F(xi+2,yi–1.5)=(xi+2)2+(yi–1.5)2–R2
展开后将d带入可得到判别式的递推关系:
d’=d+4(xi-yi)+10
4)特别的,在第一个象限的第一个点(0,R)时,可以推倒出判别式d的初始值d0:
d0=F(1,R–0.5)=1–(R–0.5)2–R2=3-2R
考虑到圆心不在原点的情况,需要对计算出来的坐标进行平移。
3.6实验代码
(1)角度DDA圆生成算法
/
//角度DDA圆生成算法
/
void CLiHuchenView::OnDdacircle()
{
// TODO: Add your command handler code here
CDC *pDC=GetDC();//获取设备指针
int xc=200,yc=200,r=50,c=RGB(0,0,255);///定义圆心,角度,半径,圆的颜色蓝色
int x=0,y=r,n=r; //赋初值
double rc = (double)r; //修改类型
double z=1.0/rc; //得到微分角度
double a=x,b=y; //将x,y分别赋予a,b
double tmp; //定义变量
while(n > 0)
{
//八个区域点,画点
pDC->SetPixel((xc+x),(yc+y),c);//(x,y)
pDC->SetPixel((xc-x),(yc+y),c);//(-x,y)
pDC->SetPixel((xc+x),(yc-y),c);//(x,-y)
pDC->SetPixel((xc-x),(yc-y),c);//(-x,-y)
pDC->SetPixel((xc+y),(yc+x),c);//(y,x)
pDC->SetPixel((xc-y),(yc+x),c);//(-y,x)
pDC->SetPixel((xc+y),(yc-x),c);//(y,-x)
pDC->SetPixel((xc-y),(yc-x),c);//(-y,-x)
tmp=a;
a-=b*z; //计算下一点横坐标
b+=tmp*z; //计算下一点纵坐标
x = (int)(a);
y = (int)(b);
n--;
}
if(x == y)
{
//八个区域点,画点
pDC->SetPixel((xc+x),(yc+y),c);//(x,y)
pDC->SetPixel((xc-x),(yc+y),c);//(-x,y)
pDC->SetPixel((xc+x),(yc-y),c);//(x,-y)
pDC->SetPixel((xc-x),(yc-y),c);//(-x,-y)
pDC->SetPixel((xc+y),(yc+x),c);//(y,x)
pDC->SetPixel((xc-y),(yc+x),c);//(-y,x)
pDC->SetPixel((xc+y),(yc-x),c);//(y,-x)
pDC->SetPixel((xc-y),(yc-x),c);//(-y,-x)
}
ReleaseDC(pDC);//指针释放
}
(2)中点圆生成算法:
/
//中点圆生成算法
/
void CLiHuchenView::OnMidpointcircle()
{
// TODO: Add your command handler code here
CDC *pDC=GetDC();//获取设备指针
int xc=300,yc=300,r=50,c=RGB(255,0,0);///定义圆心,半径,圆的颜色红色
int x,y;//定义变量x,y
float d;//定义中点带入圆的值d
x=0;y=r;d=1.25-r;//赋初值
//八个区域点,画点
pDC->SetPixel((xc+x),(yc+y),c);//(x,y)
pDC->SetPixel((xc-x),(yc+y),c);//(-x,y)
pDC->SetPixel((xc+x),(yc-y),c);//(x,-y)
pDC->SetPixel((xc-x),(yc-y),c);//(-x,-y)
pDC->SetPixel((xc+y),(yc+x),c);//(y,x)
pDC->SetPixel((xc-y),(yc+x),c);//(-y,x)
pDC->SetPixel((xc+y),(yc-x),c);//(y,-x)
pDC->SetPixel((xc-y),(yc-x),c);//(-y,-x)
//画圆
while(x<=y)
{
//判断d的正负
if(d<0)
{
d+=2*x+3;
}
else
{
d+=2*(x-y)+5;
y--;
}
x++;
pDC->SetPixel((xc+x),(yc+y),c);//(x,y)
pDC->SetPixel((xc-x),(yc+y),c);//(-x,y)
pDC->SetPixel((xc+x),(yc-y),c);//(x,-y)
pDC->SetPixel((xc-x),(yc-y),c);//(-x,-y)
pDC->SetPixel((xc+y),(yc+x),c);//(y,x)
pDC->SetPixel((xc-y),(yc+x),c);//(-y,x)
pDC->SetPixel((xc+y),(yc-x),c);//(y,-x)
pDC->SetPixel((xc-y),(yc-x),c);//(-y,-x)
}
ReleaseDC(pDC);//指针释放
}
(3)Bresenham圆生成算法:
/
//Bresenham圆生成算法
/
void CLiHuchenView::OnBresenhamcircle()
{
// TODO: Add your command handler code here
CDC *pDC=GetDC();//获取设备指针
int xc=100,yc=100,r=50,c=RGB(0,255,0);///定义圆心,半径,圆的颜色绿色
int x=0,y=r,p=3-2*r;//赋初值
//画圆
while(x<y)
{
//八个区域点,画点
pDC->SetPixel((xc+x),(yc+y),c);//(x,y)
pDC->SetPixel((xc-x),(yc+y),c);//(-x,y)
pDC->SetPixel((xc+x),(yc-y),c);//(x,-y)
pDC->SetPixel((xc-x),(yc-y),c);//(-x,-y)
pDC->SetPixel((xc+y),(yc+x),c);//(y,x)
pDC->SetPixel((xc-y),(yc+x),c);//(-y,x)
pDC->SetPixel((xc+y),(yc-x),c);//(y,-x)
pDC->SetPixel((xc-y),(yc-x),c);//(-y,-x)
//判断p的正负
if(p<0)
{
p+=4*x+6;
}
else
{
p+=4*(x-y)+10;
y--;
}
x++;
if(x==y)
pDC->SetPixel((xc+x),(yc+y),c);//(x,y)
pDC->SetPixel((xc-x),(yc+y),c);//(-x,y)
pDC->SetPixel((xc+x),(yc-y),c);//(x,-y)
pDC->SetPixel((xc-x),(yc-y),c);//(-x,-y)
pDC->SetPixel((xc+y),(yc+x),c);//(y,x)
pDC->SetPixel((xc-y),(yc+x),c);//(-y,x)
pDC->SetPixel((xc+y),(yc-x),c);//(y,-x)
pDC->SetPixel((xc-y),(yc-x),c);//(-y,-x)
}
ReleaseDC(pDC);//指针释放
}
3.7实验结果展示
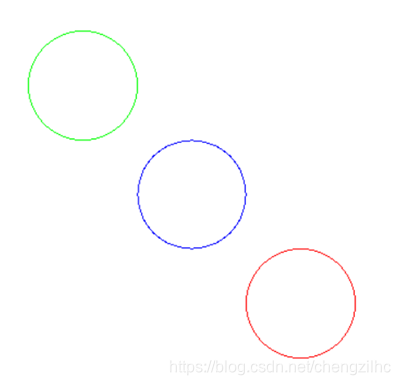 红色:中点画线算法
红色:中点画线算法
绿色: Bresenham算法
蓝色:角度微分法(DDA法)