本文转载自:
 https://www.cnblogs.com/xh6300/p/6366694.html
https://www.cnblogs.com/xh6300/p/6366694.html基于形状的模板查找算子:
find_shape_model(Image : : ModelID, AngleStart, AngleExtent, MinScore, NumMatches, MaxOverlap, SubPixel, NumLevels, Greediness : Row, Column, Angle, Score)
MaxOverlap:意思是允许的最大重叠区域。
那么我们想问,这个重叠区域指的是哪个区域呢?
如果下图是创建形状模型的图像:

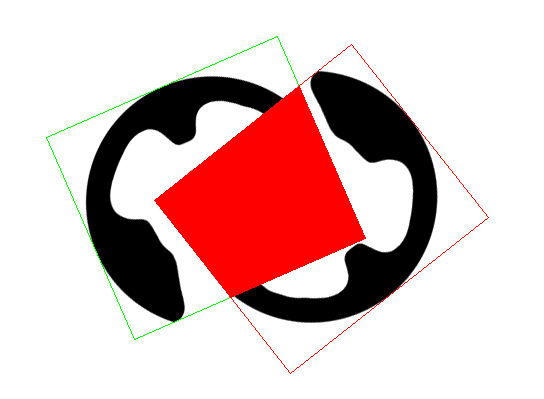
那么对于下图来说,其中的2个形状有重叠吗?

按照一般的理解,很显然没有重叠,只是一个刚好插到另一个的缝隙中去了,但是两个形状貌似并没有实质上的重叠。
后来看了一些资料,说这里的重叠指的是每个形状的最小外接矩形重叠的部分。即下图中红色的色块:
事实是否如此,我来验证一下:
*建立模型 01.png是本文第1张图,02.png是本文第2张图
read_image (Image_mode, 'C:/Users/happy xia/Desktop/01.png')
create_shape_model (Image_mode, 'auto', -3.0, 6.79, 'auto', 'auto', 'use_polarity', 'auto', 'auto', ModelID2)
*验证
read_image (Image, 'C:/Users/happy xia/Desktop/02.png')
dev_set_draw ('margin')
binary_threshold (Image, Region, 'max_separability', 'dark', UsedThreshold)
connection (Region, ConnectedRegions)
smallest_rectangle2 (ConnectedRegions, Row, Column, Phi, Length1, Length2)
gen_rectangle2 (Rectangle, Row, Column, Phi, Length1, Length2)
select_obj (Rectangle, ObjectSelected, 1)
select_obj (Rectangle, ObjectSelected1, 2)
area_center (ObjectSelected1, Area1, Row11, Column11)
intersection (ObjectSelected, ObjectSelected1, RegionIntersection)
area_center (RegionIntersection, Area, Row1, Column1)
*(Area1 + 0.1)是想让商为小数,不然的话ratio会等于0
ratio := Area/(Area1 + 0.1)
disp_message (3600, ratio, 'image', 160, 205, 'red', 'true')
dev_display (Image)
*注意:第6个参数NumMatchs = 0,意思是不限制匹配的个数,可以匹配出多个
find_shape_model (Image, ModelID2,-3.0, 6.79 ,0.5, 0, ratio + 0.01 , 'least_squares', 0, 0.9, Row2, Column2, Angle2, Score2)
* get_shape_model_contours (ModelContours, ModelID2, 1)
* vector_angle_to_rigid (0, 0, 0, Row2[0], Column2[0], Angle2[0], HomMat2D0)
* affine_trans_contour_xld (ModelContours, ContoursAffinTrans0, HomMat2D0)
* vector_angle_to_rigid (0, 0, 0, Row2[1], Column2[1], Angle2[1], HomMat2D1)
* affine_trans_contour_xld (ModelContours, ContoursAffinTrans1, HomMat2D1)
这里,重叠部分和单个形状最小外接矩形的面积比值为0.426317。
当find_shape_model中参数MaxOverlap取值为ratio + 0.01(或者ratio)时,Score2 = [0.999136, 0.998544]。
当find_shape_model中参数MaxOverlap取值为ratio - 0.01时,Score2 = 0.999136,即只找到了一个。
由此可以说明:ratio(值为0.426317)确实是本例中的允许的最大重叠比例的分界值,进而可以确定find_shape_model中的MaxOverlap指的是每个形状的最小外接矩形重叠的部分所占单个最小矩形的比例。
-----
基于形状匹配的参数关系与优化
这里主要是重复说明一下这些参数的作用,再强调一下它们影响匹配速度的程度;在为了提高速度而设置参数之前,有必要找出那些在所有测试图像中匹配成功的设置,这时需考虑以下情况:
① 必须保证物体在图像边缘处截断,也就是保证轮廓的清晰,这些可以通过形态学的一些方法来处理;
② 如果Greediness值设的太高,就找不到其中一些可见物体,这时最后将其设为0来执行完全搜索;
③ 物体是否有封闭区域,如果要求物体在任何状态下都能被识别,则应减小MinScore值;
④ 判断在金字塔最高级上的匹配是否失败,可以通过find_shape_model()减小NumLevels值来测试;
⑤ 物体是否具有较低的对比度,如果要求物体在任何状态下都能被识别,则应减小MinContrast值;
⑥ 判断是否全局地或者局部地转化对比度极性,如果需要在任何状态下都能被识别,则应给参数Metric设置一个合适的值;
⑦ 物体是否与物体的其他实例重叠,如果需要在任何状态下都能识别物体,则应增加MaxOverlap值;
⑧ 判断是否在相同物体上找到多个匹配值,如果物体几乎是对称的,则需要控制旋转范围。
如何加快搜索匹配,需要在这些参数中进行合理的搭配,有以下方法可以参考:
① 只要匹配成功,则尽可能增加参数MinScore的值;
② 增加Greediness值直到匹配失败,同时在需要时减小MinScore值;
③ 如果有可能,在创建模板时使用一个大的NumLevels,即将图像多分几个金字塔级;
④ 限定允许的旋转范围和大小范围,在调用find_shape_model()时调整相应的参数;
⑤ 尽量限定搜索ROI的区域。
除上面介绍的以外,在保证能够匹配的情况下,尽可能的增大Greediness的值,因为在后面的实验中,用模板匹配进行视频对象跟踪的过程中,这个值在很大程度上影响到匹配的速度。
当然这些方法都需要跟实际联系起来,不同图像在匹配过程中也会有不同的匹配效果,在具体到某些应用,不同的硬件设施也会对这个匹配算法提出新的要求,所以需要不断地去尝试。