点击下方卡片,关注“CVer”公众号
AI/CV重磅干货,第一时间送达
丰色 发自 凹非寺
转载自:量子位(QbitAI)
如何最大限度地提升模型精度?
最近,谷歌等机构发现:
性能不好的微调模型先不要扔,求一下平均权重!
就能在不增加推理时间以及内存开销的情况下,提高模型的准确性和稳健性。
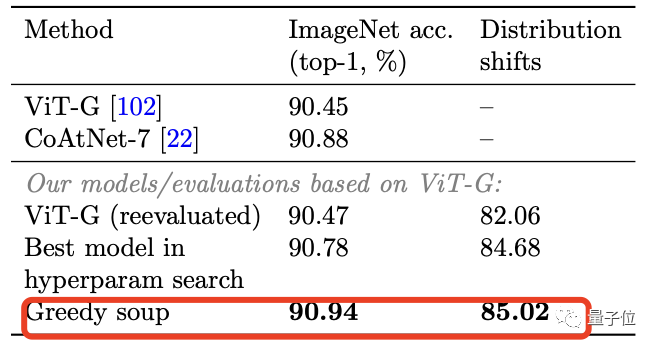
比如,研究人员就使用该方法创造了ImageNet1K的新纪录:90.94%。
将它扩展到多个图像分类以及自然语言处理任务中,也能提高模型的分布外性能,并改善新下游任务的零样本性能。

而这个方法还有一个有趣的名字,叫Module soup——
是不是让人一下子就让人联想到了斐波那契汤的笑话?(昨天的汤+前天的汤=今天的新汤)
△ 知乎网友@hzwer,已授权
一共三种配方
回想一下在此之前,大家是如何给模型涨点的呢?
是不是先用各种超参数训练出多个微调模型,然后再挑出验证集上表现最好的那一个留下,其余丢掉?
由于神经网络是非线性的,在不同的loss basin中可能有许多解,因此Module soup这一采用保留所有微调模型的权重,对其进行平均的方法就可以提高性能,还是让人有点惊讶的。
不过,最近就已有研究发现,从相同的初始化配置中中独立优化的微调模型,位于相同的误差范围内 (lie in the same basin of the error landscape)。
之前也有研究证明,沿单个训练轨迹进行权重平均,可以提高随机初始化训练模型的性能。
作者正是从这些结论中受到启发。
Module soup一共有三种“配方”(实现):统一汤(uniform soup)、贪婪汤(greedy soup)和学习汤(learned soup)。
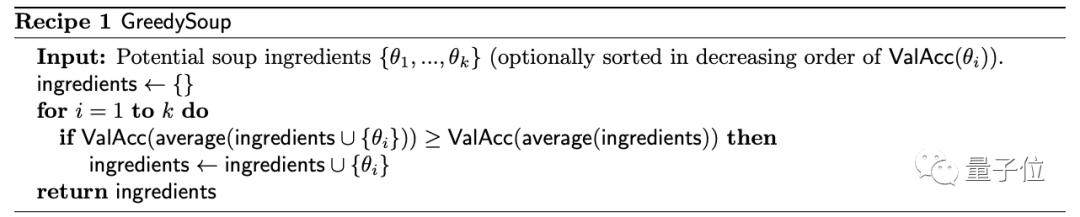
其中greedy soup是最主要采用的实现,因为它的性能比直接均匀地平均所有权重更高。
具体来说,Greedy soup通过顺序添加每个模型作为“汤”中的潜在成分构建而成,并且只有在保持验证集上的性能有所提高时才将相应模型保留在“汤”中。
排序按验证集精度的降序排列。
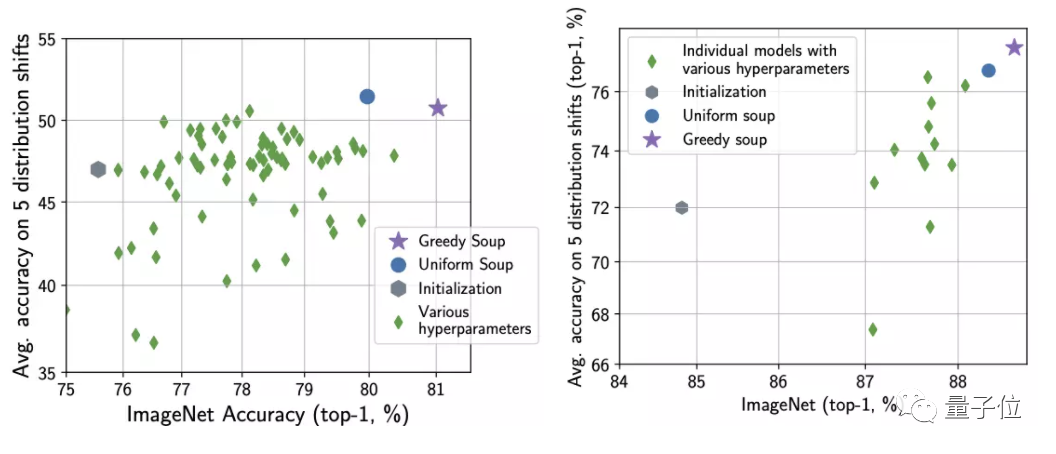
性能超越单个最佳微调模型
作者进行了全面的微调实验来确定Module soup的有效性。
首先是微调CLIP和ALIGN,这两个模型在图像-文本对上进行了对比损失预训练。
结果经过module soup操作后,两者在分布内和自然分布转移(distribution shifts)测试集上的表现都比最佳的单个微调模型性能更佳。
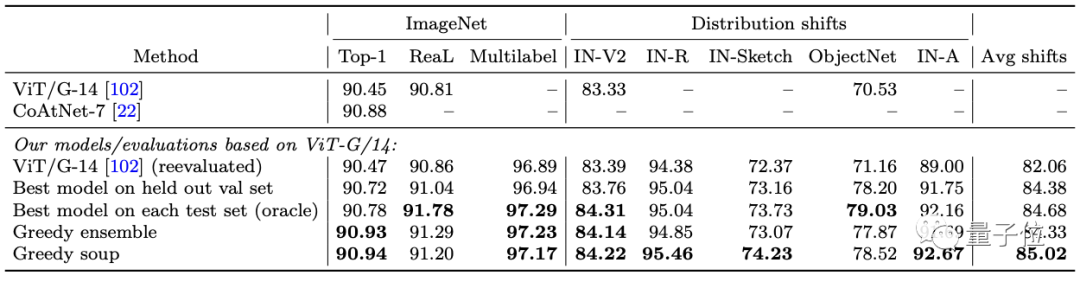
然后是在JFT数据集上预训练的ViT-G模型。
也就是它在ImageNet1K数据集实现了90.94%的精度,打破了此前CoAtNet保持的90.88%,同时在推理阶段还减少了25%的FLOPs。
在图像分类任务以外,作者在NLP领域也对module soup进行了验证。
下表是BERT和T5模型在GLUE benchmark的四个文本分类任务上的结果:

可以发现,虽然改进不如图像分类中的效果明显,但在多数任务下,greedy soup都可以相较最好的单个模型提高性能。
当然,作者也指出,module soup在适用性等方面存在局限,比如现在测试的都是在大型异构数据集上预先训练的模型,在这些模型之外,效果并不是非常明显。
最后,知乎网友@宫酱手艺人表示,其实这样的模型参数平均是一个经典trick,transformer原始论文就用了。
你发现了吗?
论文地址:
https://arxiv.org/abs/2203.0548
知乎@宫酱手艺人、@hzwer回答(已授权):https://www.zhihu.com/question/521497951
ICCV和CVPR 2021论文和代码下载
后台回复:CVPR2021,即可下载CVPR 2021论文和代码开源的论文合集
后台回复:ICCV2021,即可下载ICCV 2021论文和代码开源的论文合集
后台回复:Transformer综述,即可下载最新的3篇Transformer综述PDF
CVer-Transformer交流群成立
扫码添加CVer助手,可申请加入CVer-Transformer 微信交流群,方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch和TensorFlow等群。
一定要备注:研究方向+地点+学校/公司+昵称(如Transformer+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群
▲长按加小助手微信,进交流群
CVer学术交流群(知识星球)来了!想要了解最新最快最好的CV/DL/ML论文速递、优质开源项目、学习教程和实战训练等资料,欢迎扫描下方二维码,加入CVer学术交流群,已汇集数千人!
▲扫码进群
▲点击上方卡片,关注CVer公众号
整理不易,请点赞和在看