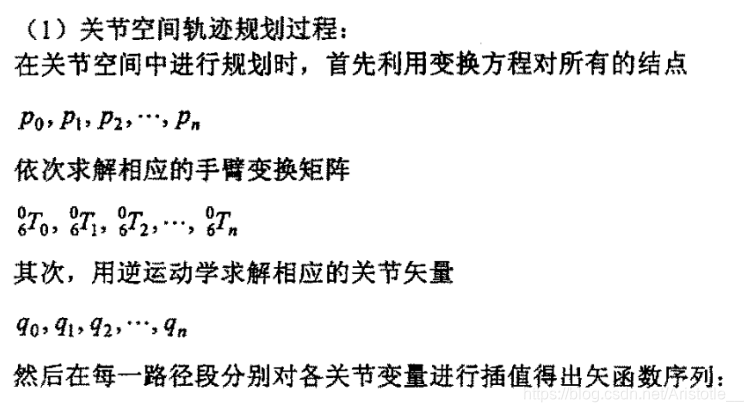
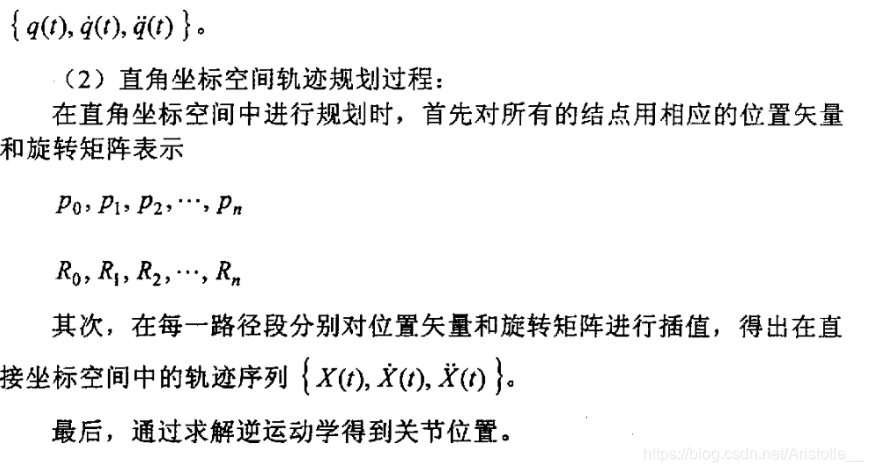
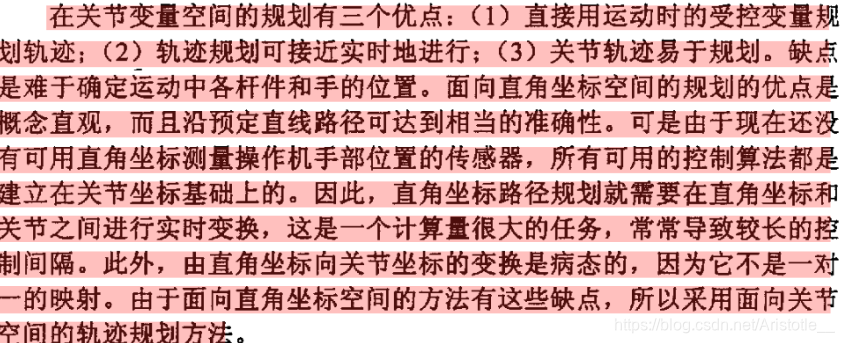
机械臂轨迹规划的两种方法:关节空间中进行和直角坐标中进行。
猜你喜欢
转载自blog.csdn.net/Aristotle__/article/details/106729447
今日推荐
周排行