Linux系统编程——进程间通信
1. 进程间通信

在进程间完成数据传递需要借助操作系统提供特殊的方法,如:文件、管道、信号、共享内存、消息队列、套接字、命名管道等。随着计算机的蓬勃发展,一些方法由于自身设计缺陷被淘汰或者弃用。现今常用的进程间通信方式有:
① 管道 (使用最简单)
② 信号 (开销最小)
③ 共享映射区 (无血缘关系)
④ 本地套接字 (最稳定)
- 管道pipe:管道是一种半双工的通信方式,数据只能单向流动,而且只能在具有亲缘关系的进程间使用。进程的亲缘关系通常是指父子进程关系。
- 命名管道FIFO:有名管道也是半双工的通信方式,但是它允许无亲缘关系进程间的通信。
- 消息队列MessageQueue:消息队列是由消息的链表,存放在内核中并由消息队列标识符标识。消息队列克服了信号传递信息少、管道只能承载无格式字节流以及缓冲区大小受限等缺点。
- 共享存储SharedMemory:共享内存就是映射一段能被其他进程所访问的内存,这段共享内存由一个进程创建,但多个进程都可以访问。共享内存是最快的 IPC 方式,它是针对其他进程间通信方式运行效率低而专门设计的。它往往与其他通信机制,如信号量,配合使用,来实现进程间的同步和通信。
- 信号量Semaphore:信号量是一个计数器,可以用来控制多个进程对共享资源的访问。它常作为一种锁机制,防止某进程正在访问共享资源时,其他进程也访问该资源。因此,主要作为进程间以及同一进程内不同线程之间的同步手段。
- 套接字Socket:套解口也是一种进程间通信机制,与其他通信机制不同的是,它可用于不同及其间的进程通信。
- 信号 ( sinal ) : 信号是一种比较复杂的通信方式,用于通知接收进程某个事件已经发生。
2. 管道
2.1 管道的概念
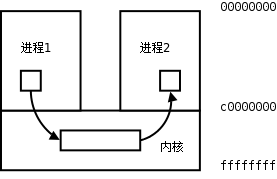
管道是一种最基本的IPC机制,作用于有血缘关系的进程之间,完成数据传递。调用pipe系统函数即可创建一个管道。
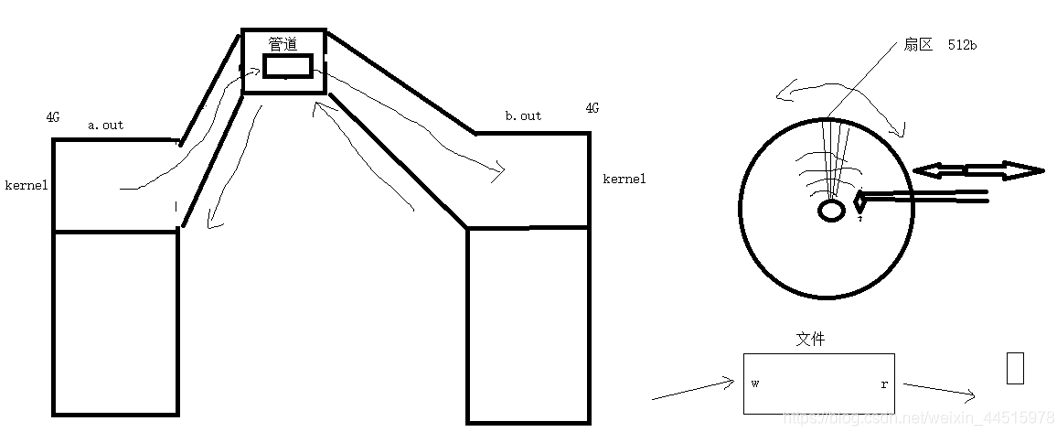
磁盘通过振臂的收缩和磁盘的旋转来定位到磁盘的某一点上,磁盘被划分为若干个等分,每一份称为一个扇区,大小为512KB,
- 有如下特质:
- ① 其本质是一个伪文件(实为内核缓冲区) ,伪文件不占用磁盘存储
- ②由两个文件描述符引用,一个表示读端,一个表示写端。
- ③规定数据从管道的写端流入管道,从读端流出。
- 管道的原理
- 管道实为内核使用环形队列机制,借助内核缓冲区(4k)实现。
- 管道的局限性
- ① 数据自己读不能自己写。
- ② 数据一旦被读走,便不在管道中存在,不可反复读取。
- ③ 由于管道采用半双工通信方式。因此,数据单向流动。
- ④ 只能在有公共祖先的进程间使用管道。(具有血缘关系)
常见的通信方式有:单工通信、半双工通信、全双工通信。
2.2 pipe函数
创建管道: int pipe(int pipefd[2]); fd[2]为传出参数
- 成功:0;失败:-1,设置errno
- 函数调用成功返回r/w两个文件描述符。无需open,但需手动close。
- 规定:fd[0] → r; fd[1] → w,就像0对应标准输入,1对应标准输出一样。向管道文件读写数据其实是在读写内核缓冲区。
- 管道创建成功以后,创建该管道的进程(父进程)同时掌握着管道的读端和写端。
实现父子进程间通信,通常可以采用如下步骤:
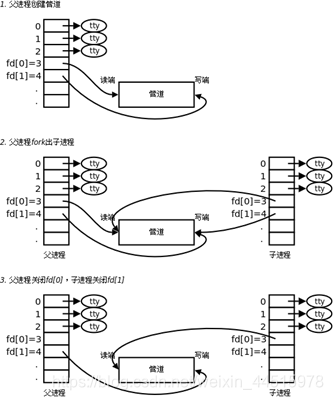
- 父进程调用pipe函数创建管道,得到两个文件描述符fd[0]、fd[1]指向管道的读端和写端。
- 父进程调用fork创建子进程,那么子进程也有两个文件描述符指向同一管道。
- 父进程关闭管道读端,子进程关闭管道写端。父进程可以向管道中写入数据,子进程将管道中的数据读出。由于管道是利用环形队列实现的,数据从写端流入管道,从读端流出,这样就实现了进程间通信。
父子进程使用管道通信,父写入字符串,子进程读出并打印到屏幕。
#include <unistd.h>
#include <iostream>
#include <cstring>
using namespace std;
int main(){
int fd[2];
int ret = pipe(fd);
if(ret == -1){
perror("pipe error");
exit(1);
}
pid_t pid = fork();
if(pid == -1){
perror("fork error");
exit(1);
}else if(pid == 0){
//子进程读数据
close(fd[1]);//子进程关闭写端
//子进程读数据
char buf[1024];
int flag = read(fd[0],buf,sizeof(buf));
if(flag == 0){
cout << "------------" << endl;
}
write(STDOUT_FILENO,buf,flag);//显示到屏幕
}else{
//父进程,写数据
close(fd[0]);//父进程关闭读端
write(fd[1],"hello pipe\n",strlen("hello pipe\n"));
}
return 0;
}
思考:为甚么,程序中没有使用sleep函数,但依然能保证子进程运行时一定会读到数据呢?
2.3 管道的读写行为
使用管道需要注意以下4种特殊情况(假设都是阻塞I/O操作,没有设置O_NONBLOCK标志):
- 如果所有指向管道写端的文件描述符都关闭了(管道写端引用计数为0),而仍然有进程从管道的读端读数据,那么管道中剩余的数据都被读取后,再次read会返回0,就像读到文件末尾一样。
- 如果有指向管道写端的文件描述符没关闭(管道写端引用计数大于0),而持有管道写端的进程也没有向管道中写数据,这时有进程从管道读端读数据,那么管道中剩余的数据都被读取后,再次read会阻塞,直到管道中有数据可读了才读取数据并返回。
- 如果所有指向管道读端的文件描述符都关闭了(管道读端引用计数为0),这时有进程向管道的写端write,那么该进程会收到信号SIGPIPE,通常会导致进程异常终止。当然也可以对SIGPIPE信号实施捕捉,不终止进程。具体方法信号章节详细介绍。
- 如果有指向管道读端的文件描述符没关闭(管道读端引用计数大于0),而持有管道读端的进程也没有从管道中读数据,这时有进程向管道写端写数据,那么在管道被写满时再次write会阻塞,直到管道中有空位置了才写入数据并返回。
总结:
① 读管道:
- <1> 管道中有数据,read返回实际读到的字节数。
- <2> 管道中无数据:
- (1) 管道写端被全部关闭,read返回0 (好像读到文件结尾)
- (2) 写端没有全部被关闭,read阻塞等待(不久的将来可能有数据递达,此时会让出cpu)
② 写管道:
- <1> 管道读端全部被关闭, 进程异常终止(也可使用捕捉SIGPIPE信号,使进程不终止)
- <2> 管道读端没有全部关闭:
- (1) 管道已满,write阻塞。
- (2) 管道未满,write将数据写入,并返回实际写入的字节数。
练习:使用管道实现父子进程间通信,完成:ls | wc –l。假定父进程实现ls,子进程实现wc。
ls命令正常会将结果集写出到stdout,但现在会写入管道的写端;wc –l 正常应该从stdin读取数据,但此时会从管道的读端读。
#include <iostream>
#include <unistd.h>
#include <sys/wait.h>
using namespace std;
int main(){
int fd[2];
pipe(fd);
pid_t pid = fork();
if (pid == 0) {
//child
close(fd[1]); //子进程从管道中读数据,关闭写端
dup2(fd[0], STDIN_FILENO); //让wc从管道中读取数据
execlp("wc", "wc", "-l", NULL); //wc命令默认从标准读入取数据
} else {
close(fd[0]); //父进程向管道中写数据,关闭读端
dup2(fd[1], STDOUT_FILENO); //将ls的结果写入管道中
execlp("ls", "ls", NULL); //ls输出结果默认对应屏幕
}
return 0;
}
- 程序不时的会出现先打印$提示符,再出程序运行结果的现象。
- 这是因为:父进程执行ls命令,将输出结果给通过管道传递给
- 子进程去执行wc命令,这时父进程若先于子进程打印wc运行结果
- 之前被shell使用wait函数成功回收,shell就会先于子进程打印
- wc运行结果之前打印$提示符。
- 解决方法:让子进程执行ls,父进程执行wc命令。或者在兄弟进程间完成。
程序执行,发现程序执行结束,shell还在阻塞等待用户输入。这是因为,shell → fork → ./pipe1, 程序pipe1的子进程将stdin重定向给管道,父进程执行的ls会将结果集通过管道写给子进程。若父进程在子进程打印wc的结果到屏幕之前被shell调用wait回收,shell就会先输出$提示符。
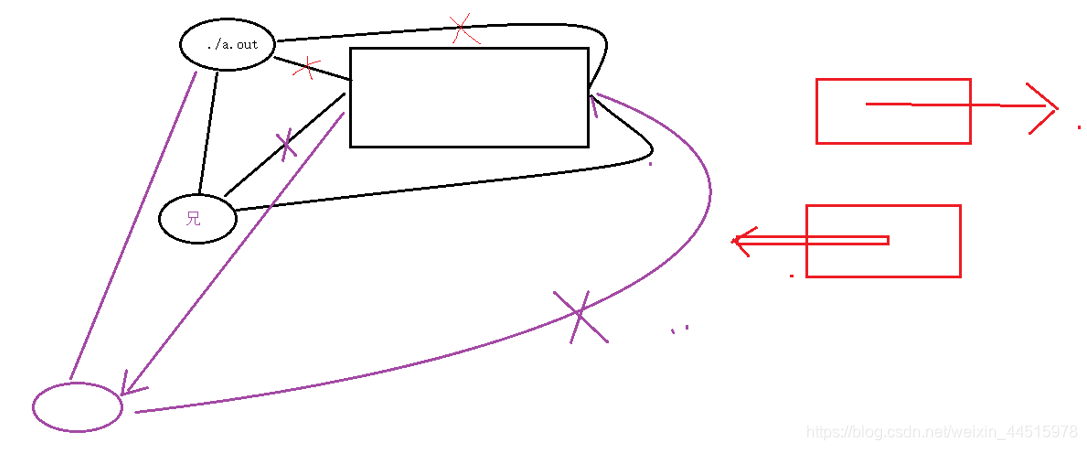
练习:使用管道实现兄弟进程间通信。 兄:ls 弟: wc -l 父:等待回收子进程。
要求,使用“循环创建N个子进程”模型创建兄弟进程,使用循环因子i标示。注意管道读写行为。
#include <iostream>
#include <unistd.h>
#include <sys/wait.h>
using namespace std;
int main(void)
{
pid_t pid;
int fd[2], i;
pipe(fd);
for (i = 0; i < 2; i++) {
if((pid = fork()) == 0) {
break;
}
}
if (i == 0) {
//兄
close(fd[0]); //写,关闭读端
dup2(fd[1], STDOUT_FILENO);
execlp("ls", "ls", NULL);
} else if (i == 1) {
//弟
close(fd[1]); //读,关闭写端
dup2(fd[0], STDIN_FILENO);
execlp("wc", "wc", "-l", NULL);
} else {
close(fd[0]);
close(fd[1]);
for(i = 0; i < 2; i++) //两个儿子wait两次
wait(NULL);
}
return 0;
}
测试:是否允许,一个pipe有一个写端,多个读端呢?是否允许有一个读端多个写端呢? 【pipe3.c】
2.4 管道缓冲区大小
可以使用ulimit –a 命令来查看当前系统中创建管道文件所对应的内核缓冲区大小。通常为:
pipe size (512 bytes, -p) 8也可以使用fpathconf函数,借助参数 选项来查看。使用该宏应引入头文件<unistd.h>long fpathconf(int fd, int name); 成功:返回管道的大小 失败:-1,设置errno
2.5 管道的优劣
优点:简单,相比信号,套接字实现进程间通信,简单很多。
缺点:
- 只能单向通信,双向通信需建立两个管道。
- 只能用于父子、兄弟进程(有共同祖先)间通信。该问题后来使用fifo有名管道解决。
3. FIFO
FIFO常被称为命名管道,以区分管道(pipe)。管道(pipe)只能用于“有血缘关系”的进程间。但通过FIFO,不相关的进程也能交换数据。
FIFO是Linux基础文件类型中的一种。但FIFO文件在磁盘上没有数据块,仅仅用来标识内核中一条通道。各进程可以打开这个文件进行read/write,实际上是在读写内核通道,这样就实现了进程间通信。
创建方式:
-
命令:mkfifo 管道名

-
库函数:
int mkfifo(const char *pathname, mode_t mode);建立一个名字为filename的命名管道,参数mode为该文件的权限(mode%~umask),成功:0; 失败:-1
一旦使用mkfifo创建了一个FIFO,就可以使用open打开它,常见的文件I/O函数都可用于fifo。如:close、read、write、unlink等。
4. 共享存储映射
4.1 文件进程间通信
使用文件也可以完成IPC,理论依据是,fork后,父子进程共享文件描述符。也就共享打开的文件。
测试:父子进程共享打开的文件。借助文件进行进程间通信。子进程写入数据到test.txt ,父进程把数据读出
#include <iostream>
#include <stdlib.h>
#include <fcntl.h>
#include <sys/wait.h>
#include <unistd.h>
#include <cstring>
using namespace std;
int main(){
pid_t pid = fork();
int fd1,fd2;
char buf[1024];
char const*str = "-----test for share fd in parent child process-----\n";
if(pid == 0){
//子进程
fd1 = open("test.txt",O_RDWR | O_CREAT,0777);
if(fd1 == 0){
perror("child open error");
exit(1);
}
write(fd1,str,strlen(str));
cout << "child worte over...." << endl;
}else if(pid > 0){
fd2 = open("test.txt",O_RDWR);
if(fd2 == -1){
perror("father open error");
exit(1);
}
sleep(1);//保证子进程写入数据
}else{
perror("fork error");
exit(1);
}
return 0;
}
思考,无血缘关系的进程可以打开同一个文件进行通信吗?为什么?
4.2 存储映射I/O
存储映射I/O (Memory-mapped I/O) 使一个磁盘文件与存储空间中的一个缓冲区相映射。于是当从缓冲区中取数据,就相当于读文件中的相应字节。于此类似,将数据存入缓冲区,则相应的字节就自动写入文件。这样,就可在不适用read和write函数的情况下,使用**地址(指针)**完成I/O操作。
使用这种方法,首先应通知内核,将一个指定文件映射到存储区域中。这个映射工作可以通过mmap函数来实现。

4.3 mmap函数
void *mmap(void *adrr, size_t length, int prot, int flags, int fd, off_t offset);
- 返回:成功:返回创建的映射区首地址;失败:MAP_FAILED宏
- 参数:
- addr: 建立映射区的首地址,由Linux内核指定。使用时,直接传递NULL
- length: 欲创建映射区的大小
- prot: 映射区权限 PROT_READ、PROT_WRITE、PROT_READ|PROT_WRITE
- flags: 标志位参数(常用于设定更新物理区域、设置共享、创建匿名映射区)
- MAP_SHARED: 会将映射区所做的操作反映到物理设备(磁盘)
- MAP_PRIVATE: 映射区所做的修改不会反映到物理设备。
- fd:用来建立映射区的文件描述符
- offset:映射文件的偏移(4k的整数倍),因为mmu在映射的时候最小单位为4k
4.4 munmap函数
同malloc函数申请内存空间类似的,mmap建立的映射区在使用结束后也应调用类似free的函数来释放。
int munmap(void *addr, size_t length); 成功:0; 失败:-1
创建映射区,把字符串abc写入文件:
#include <iostream>
#include <stdlib.h>
#include <fcntl.h>
#include <sys/stat.h>
#include <sys/types.h>
#include <unistd.h>
#include <sys/mman.h>
#include <cstring>
using namespace std;
int main(){
int fd = open("hello.txt",O_RDWR | O_CREAT,0644);
if(fd == -1){
perror("open error");
exit(1);
}
//mmap创建映射区
if(fd == -1){
perror("open error");
exit(1);
}
char *p = NULL;
p = (char*)mmap(NULL,4,PROT_READ|PROT_WRITE,MAP_SHARED,fd,0);
if(p == MAP_FAILED){
perror("mmap error");
exit(1);
}
strcpy(p,"abc\n");//写数据
int ret = munmap(p,4);//释放映射区
if(ret == -1){
perror("munmap error");
exit(1);
}
close(fd);
return 0;
}
4.5 mmap注意事项
- 可以open的时候O_CREAT一个新文件来创建映射区吗? 可以
- 如果open时O_RDONLY, mmap时PROT参数指定PROT_READ|PROT_WRITE会怎样?参数flags为共享时,报错权限不足;为私有时,报错总线不足
- 文件描述符先关闭,对mmap映射有没有影响?没有影响
- 如果文件偏移量为1000会怎样?报错:无效参数
- 如果不检测mmap的返回值,会怎样?
总结:使用mmap时务必注意以下事项:
- 创建映射区的过程中,隐含着一次对映射文件的读操作。
- 当MAP_SHARED时,要求:映射区的权限应 <=文件打开的权限(出于对映射区的保护)。而MAP_PRIVATE则无所谓,因为mmap中的权限是对内存的限制。
- 映射区的释放与文件关闭无关。只要映射建立成功,文件可以立即关闭。
- 特别注意,当映射文件大小为0时,不能创建映射区。所以:用于映射的文件必须要有实际大小!!mmap使用时常常会出现总线错误,通常是由于共享文件存储空间大小引起的。
- munmap传入的地址一定是mmap的返回地址。坚决杜绝指针++操作。
- 如果文件偏移量必须为4K的整数倍
- mmap创建映射区出错概率非常高,一定要检查返回值,确保映射区建立成功再进行后续操作。
4.6 mmap父子进程通信
父子等有血缘关系的进程之间也可以通过mmap建立的映射区来完成数据通信。但相应的要在创建映射区的时候指定对应的标志位参数flags:
- MAP_PRIVATE: (私有映射) 父子进程各自独占映射区;
- MAP_SHARED: (共享映射) 父子进程共享映射区;
练习:父进程创建映射区,然后fork子进程,子进程修改映射区内容,而后,父进程读取映射区内容,查验是否共享。
#include <stdlib.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/mman.h>
#include <sys/wait.h>
#include <iostream>
using namespace std;
int var = 100;
int main(){
pid_t pid;
int *p;
int fd = open("temp.txt",O_RDWR|O_CREAT|O_TRUNC,0644);//创建一个文件,并把文件大小截断为0
if(fd == -1){
perror("open error");
exit(1);
}
unlink("temp.txt");//删除临时文件目录项,使之具备被释放的条件
ftruncate(fd,4);//文件大小设置为4kb
//创建映射区
p = (int*)mmap(NULL,4,PROT_READ|PROT_WRITE,MAP_PRIVATE,fd,0);
//p = (int*)mmap(NULL,4,PROT_READ|PROT_WRITE,MAP_PRIVATE,fd,0);
if(p == MAP_FAILED){
perror("mmap error");
exit(1);
}
close(fd);//映射区创建完毕,即可关闭文件
pid = fork();//创建子进程
if(pid == 0){
*p = 2000;
var = 999;
cout << "child : *p = " << *p << " ,var = " << var << endl;
}else if(pid > 0){
sleep(1);
cout << "father : *p = " << *p << " ,var = " << var << endl;
wait(NULL);
}else{
perror("fork error");
exit(1);
}
//释放映射区
int ret = munmap(p,4);
if(ret == -1){
perror("munmap error");
exit(1);
}
return 0;
}
-
MAP_PRIVATE: (私有映射) 父子进程各自独占映射区;

因为此时父子进程各自独占映射区,子进程对*p进行修改,并不影响父进程的*p。 -
MAP_SHARED: (共享映射) 父子进程共享映射区;

结论:父子进程共享:1. 打开的文件 2. mmap建立的映射区(但必须要使用MAP_SHARED)
4.7 匿名映射
通过使用我们发现,使用映射区来完成文件读写操作十分方便,父子进程间通信也较容易。但缺陷是,每次创建映射区一定要依赖一个文件才能实现。通常为了建立映射区要open一个temp文件,创建好了再unlink、close掉,比较麻烦。 可以直接使用匿名映射来代替。其实Linux系统给我们提供了创建匿名映射区的方法,无需依赖一个文件即可创建映射区。同样需要借助标志位参数flags来指定。
使用MAP_ANONYMOUS (或MAP_ANON), 如:
int *p = mmap(NULL, 4, PROT_READ|PROT_WRITE, MAP_SHARED|MAP_ANONYMOUS, -1, 0);
"4"随意举例,该位置表大小,可依实际需要填写。
#include <stdlib.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/mman.h>
#include <sys/wait.h>
#include <iostream>
using namespace std;
int var = 100;
int main(){
pid_t pid;
int *p;
//创建映射区
p = (int*)mmap(NULL,4,PROT_READ|PROT_WRITE,MAP_SHARED|MAP_ANON,-1,0);
if(p == MAP_FAILED){
perror("mmap error");
exit(1);
}
pid = fork();//创建子进程
if(pid == 0){
*p = 2000;
var = 999;
cout << "child : *p = " << *p << " ,var = " << var << endl;
}else if(pid > 0){
sleep(1);
cout << "father : *p = " << *p << " ,var = " << var << endl;
wait(NULL);
}else{
perror("fork error");
exit(1);
}
//释放映射区
int ret = munmap(p,4);
if(ret == -1){
perror("munmap error");
exit(1);
}
return 0;
}
需注意的是,MAP_ANONYMOUS和MAP_ANON这两个宏是Linux操作系统特有的宏。在类Unix系统中如无该宏定义,可使用如下两步来完成匿名映射区的建立。
① fd = open("/dev/zero", O_RDWR);
② p = mmap(NULL, size, PROT_READ|PROT_WRITE, MMAP_SHARED, fd, 0);

没有实际大小,使用时可以按需求设置大小
4.8 mmap无血缘关系进程间通信
实质上mmap是内核借助文件帮我们创建了一个映射区,多个进程之间利用该映射区完成数据传递。由于内核空间多进程共享,因此无血缘关系的进程间也可以使用mmap来完成通信。只要设置相应的标志位参数flags即可。若想实现共享,当然应该使用MAP_SHARED了。
strace 可执行文件 可追踪程序执行过程中所使用的系统调用有哪些
4.9 利用文件实现两个不同进程间的通信
//先执行,将数据写入文件
#include <iostream>
#include <unistd.h>
#include <fcntl.h>
#include <stdlib.h>
#include <cstring>
using namespace std;
int main(){
char buf[1024];
char const *str = "----------------first execute ----------------\n";
int ret;
int fd = open("test.txt",O_RDWR|O_CREAT,0664);
//直接打开文件写入数据
write(fd,str,strlen(str));
cout << "write into test.txt finish" << endl;
sleep(5);
//输出到屏幕
lseek(fd,0,SEEK_SET);
ret = read(fd,buf,sizeof(buf));
ret = write(STDOUT_FILENO,buf,ret);
if(ret == -1){
perror("write second error");
exit(1);
}
close(fd);
return 0;
}
//后执行,尝试读取另一个进程写入的数据
#include <iostream>
#include <unistd.h>
#include <fcntl.h>
#include <stdlib.h>
#include <cstring>
using namespace std;
int main(){
char buf[1024];
char const *str = "-----------second execute-----------\n";
int ret;
sleep(2);//保证first_execute将数据写入文件
int fd = open("test.txt",O_RDWR);
//尝试读取test.txt文件中first写入的数据
ret = read(fd,buf,sizeof(buf));
//输出到屏幕
write(STDOUT_FILENO,buf,ret);
//写入数据到文件test.txt中,未修改读写位置
write(fd,str,strlen(str));
cout << "second execute finished" << endl;
close(fd);
return 0;
}