前言
本文将使用OpenCV C++ 进行答题卡识别。
一、图像矫正

原图如图所示。我们拿到图像首先要进行图像预处理。本文目的是进行答题卡选项识别。所以,第一步我们需要将答题卡区域切割出来以进行后续识别工作。在上一篇文章我已经做过图像矫正案例OpenCV C++案例实战四《图像透视矫正》,详细内容大家可以参考,这里就不再赘述。
1.源码
void Answer::GetWarpImg(Mat src, Mat& WarpImg)
{
Mat gray;
cvtColor(src, gray, COLOR_BGR2GRAY);
Mat blur;
GaussianBlur(gray, blur, Size(3, 3), 0);
Mat canny;
Canny(blur, canny, 100, 200);
vector<vector<Point>>contours;
findContours(canny, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
//找到最大矩形轮廓
int index = 0;
double maxArea = 0;
for (int i = 0; i < contours.size(); i++)
{
double area = contourArea(contours[i]);
if (maxArea < area)
{
maxArea = area;
index = i;
}
}
//多边形近似
vector<vector<Point>>conPloy(contours.size());
double peri = arcLength(contours[index], true);
approxPolyDP(contours[index], conPloy[index], 0.02*peri, true);
//找到矩形四个顶点
vector<Point>srcPts;
for (int i = 0; i < conPloy[index].size(); i++)
{
srcPts.push_back(Point(conPloy[index][i].x, conPloy[index][i].y));
}
int width = src.cols / 2;
int height = src.rows / 2;
//将矩形四个顶点按T_L, B_L, B_R, T_R区分
int T_L, B_L, B_R, T_R;
for (int i = 0; i < srcPts.size(); i++)
{
if (srcPts[i].x < width && srcPts[i].y < height)
{
T_L = i;
}
if (srcPts[i].x < width && srcPts[i].y > height)
{
B_L = i;
}
if (srcPts[i].x > width && srcPts[i].y > height)
{
B_R = i;
}
if (srcPts[i].x > width && srcPts[i].y < height)
{
T_R = i;
}
}
/*
变换后,图像的长和宽应该变为:
长 = max(变换前左边长,变换前右边长)
宽 = max(变换前上边长,变换前下边长)
设变换后图像的左上角位置为原点位置。
*/
double upWidth = EuDis(srcPts[T_R], srcPts[T_L]);
double downWidth = EuDis(srcPts[B_R], srcPts[B_L]);
double maxWidth = max(upWidth, downWidth);
double leftHeight = EuDis(srcPts[B_L], srcPts[T_L]);
double rightHeight = EuDis(srcPts[B_R], srcPts[T_R]);
double maxHeight = max(leftHeight, rightHeight);
Point2f AffineSrcPts[4] = {
Point2f(srcPts[T_L]) ,Point2f(srcPts[T_R]) ,Point2f(srcPts[B_L]) ,Point2f(srcPts[B_R]) };
Point2f AffineDstPts[4] = {
Point2f(0, 0),Point2f(maxWidth , 0),Point2f(0, maxHeight),Point2f(maxWidth , maxHeight) };
Mat M;
//计算仿射变换矩阵
M = getPerspectiveTransform(AffineSrcPts, AffineDstPts);
//对加载图形进行仿射变换操作
warpPerspective(src, WarpImg, M, Point(maxWidth, maxHeight));
}

如图就是经图像透视矫正切割出来的答题卡区域。接下来,我们就需要对该图进行后续识别处理。
二、获取选项区域
1.扣出每题选项
我对于该案例的处理思路是:先对原图进行透视矫正;然后将每一题号选项都切割出来;最后对这些切割出来的选项一一识别。
Mat gray;
cvtColor(WarpImg, gray, COLOR_BGR2GRAY);
Mat bin;
threshold(gray, bin, 0, 255, THRESH_BINARY_INV | THRESH_OTSU);
//使用 Size(15, 5)闭操作目的是为了将每一题选项连接起来。
Mat close;
Mat kernel = getStructuringElement(MORPH_RECT, Size(15, 5));
morphologyEx(bin, close, MORPH_CLOSE, kernel);
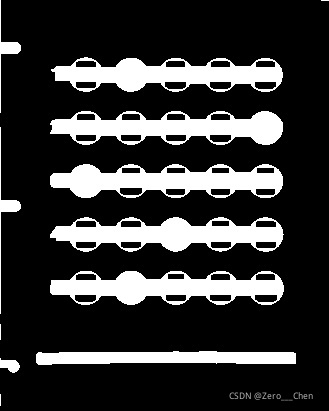
如图所示,经过上述图像预处理,我们就可以利用轮廓筛选出每一题号选项。
vector<vector<Point>>contours;
findContours(close, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
RotatedRect rect;
Rect box;
for (int i = 0; i < contours.size(); i++)
{
Mat mask = Mat::zeros(WarpImg.size(), WarpImg.type());
mask = Scalar::all(255);
double area = contourArea(contours[i]);
if (area > 1000)
{
rect = minAreaRect(contours[i]);
box = rect.boundingRect();
double ratio = rect.size.height / rect.size.width;
//将每一选项都单独抠出来放进AnswerROI容器,以便后续识别。
if (ratio > 0.1)
{
//rectangle(WarpImg, Rect(box.tl(), box.br()), Scalar(0, 255, 0), 2);
Mat ROI = WarpImg(Rect(box.tl(), box.br()));
ROI.copyTo(mask(box));
AnswerROI.push_back(mask);
}
}
}

如图为扣出的题号选项,这里只展示其中之一。接下来我们对每一题的选项进行识别就可以了。
2.源码
void Answer::GetAnswerArea(Mat&WarpImg, vector<Mat>&AnswerROI)
{
Mat gray;
cvtColor(WarpImg, gray, COLOR_BGR2GRAY);
Mat bin;
threshold(gray, bin, 0, 255, THRESH_BINARY_INV | THRESH_OTSU);
//使用 Size(15, 5)闭操作目的是为了将每一题选项连接起来。
Mat close;
Mat kernel = getStructuringElement(MORPH_RECT, Size(15, 5));
morphologyEx(bin, close, MORPH_CLOSE, kernel);
vector<vector<Point>>contours;
findContours(close, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
RotatedRect rect;
Rect box;
for (int i = 0; i < contours.size(); i++)
{
Mat mask = Mat::zeros(WarpImg.size(), WarpImg.type());
mask = Scalar::all(255);
double area = contourArea(contours[i]);
if (area > 1000)
{
rect = minAreaRect(contours[i]);
box = rect.boundingRect();
double ratio = rect.size.height / rect.size.width;
//将每一选项都单独抠出来放进AnswerROI容器,以便后续识别。
if (ratio > 0.1)
{
//rectangle(WarpImg, Rect(box.tl(), box.br()), Scalar(0, 255, 0), 2);
Mat ROI = WarpImg(Rect(box.tl(), box.br()));
ROI.copyTo(mask(box));
AnswerROI.push_back(mask);
}
}
}
reverse(AnswerROI.begin(), AnswerROI.end());
}
三、获取答案
1.思路

由于之前我们已经将图像透视矫正,并且将每一题号选项都一一抠出来作为一张新图像存储。所以,这里我们可以将每个选项按A,B,C,D,E划分区域,然后计算每个选项区域像素点个数,选项涂抹区域必定是像素点最多的,由此我们可以判定出每一题号的选项。
2.辅助函数
//计算ABCDE区域所有像素点个数
int get_pixsum(Mat image, int pixstart, int pixend)
{
int sum = 0;
for (int i = pixstart; i < pixend; i++)
{
for (int j = 0; j < image.rows; j++)
{
if (image.at<uchar>(j, i) != 0)
{
sum++;
}
}
}
return sum;
}
//找到像素点最多区域的索引
int getMaxIndex(vector<int>Answer)
{
int max = 0;
int index = -1;
for (int i = 0; i < Answer.size(); i++)
{
if (Answer[i] > max)
{
max = Answer[i];
index = i;
}
}
return index;
}
3.源码
void Answer::GetAnswer(cv::Mat&WarpImg, vector<Mat>&AnswerROI, vector<int>Answers, int &Score)
{
const double Total = 5; //题目数量
double Count = 0; //答对数量
vector<int>Results;
for (int i = 0; i < AnswerROI.size(); i++)
{
Mat gray;
cvtColor(AnswerROI[i], gray, COLOR_BGR2GRAY);
Mat bin;
threshold(gray, bin, 0, 255, THRESH_BINARY_INV | THRESH_OTSU);
vector<int>Answer;
//计算ABCDE区域所有像素点个数
int A = get_pixsum(bin, 60, 110);
int B = get_pixsum(bin, 110, 160);
int C = get_pixsum(bin, 160, 210);
int D = get_pixsum(bin, 210, 260);
int E = get_pixsum(bin, 260, 310);
Answer = {
A,B,C,D,E };
//找到像素点最多区域的索引
int Index = getMaxIndex(Answer);
Results.push_back(Index);
//将选项在原图圈出来
vector<vector<Point>>contours;
findContours(bin, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
reverse(contours.begin(), contours.end());
for (int j = 0; j < contours.size(); j++)
{
double area = contourArea(contours[j]);
if (area > 200)
{
if (Answers[i] == Index)
{
drawContours(WarpImg, contours, Index, Scalar(0, 255, 0), 2);
}
else
{
drawContours(WarpImg, contours, Answers[i], Scalar(0, 0, 255), 2);
}
}
}
}
//统计得分
for (int i = 0; i < Total; i++)
{
if (Results[i] == Answers[i])
{
Count++;
}
}
Score = (Count / Total) * 100;
}
4.效果

这里我设置的正确答案为:B,E,A,C,D。故只答对4题,得80分。
总结
本文使用OpenCV C++ 进行答题卡识别,关键步骤有以下几点。
1、图像透视矫正,将答题卡区域正确切割出来。
2、将每一题号分别抠出来存为新图像,待后续识别。
3、对每一题号确定其A,B,C,D,E选项区域,统计其像素点个数,故而匹配选项。
以上就是我对整个案例是思路以及处理手法,如果大家有更好地想法欢迎讨论。最后附上源码与素材图像。

百度网盘下载
链接:https://pan.baidu.com/s/1kt6IR3op1x90LMrLjWGpQA
提取码:reug