目录
进程与线程比较
- 进程是资源(包括内存、打开的文件等)分配的单位,线程是 CPU 调度的单位;
- 进程拥有一个完整的资源平台,而线程只独享必不可少的资源,如寄存器和栈;
- 线程同样具有就绪、阻塞、执行三种基本状态,同样具有状态之间的转换关系;
- 线程能减少并发执行的时间和空间开销;
线程相比进程能减少开销,体现在:
- 线程的创建时间比进程快,因为进程在创建的过程中,还需要资源管理信息,比如内存管理信息、文件管理信息,而线程在创建的过程中,不会涉及这些资源管理信息,而是共享它们;
- 线程的终止时间比进程快,因为线程释放的资源相比进程少很多;
- 同一个进程内的线程切换比进程切换快,因为线程具有相同的地址空间(虚拟内存共享),这意味着同一个进程的线程都具有同一个页表,那么在切换的时候不需要切换页表。而对于进程之间的切换,切换的时候要把页表给切换掉,而页表的切换过程开销是比较大的;
- 由于同一进程的各线程间共享内存和文件资源,那么在线程之间数据传递的时候,就不需要经过内核了,这就使得线程之间的数据交互效率更高了
多线程
同步与互斥
多个线程如果竞争共享资源,如果不采取有效的措施,则会造成共享数据的混乱。
由于多线程执行操作共享变量的这段代码可能会导致竞争状态,因此我们将此段代码称为临界区(*critical section*),它是访问共享资源的代码片段,一定不能给多线程同时执行。
我们希望这段代码是互斥(mutualexclusion)的,也就说保证一个线程在临界区执行时,其他线程应该被阻止进入临界区
所谓同步,就是并发进程/线程在一些关键点上可能需要互相等待与互通消息,这种相互制约的等待与互通信息称为进程/线程同步。
- 锁:加锁、解锁操作;
- 信号量:P、V 操作;
这两个都可以方便地实现进程/线程互斥,而信号量比锁的功能更强一些,它还可以方便地实现进程/线程同步。
锁分为无等待锁与自旋锁:
当获取不到锁时,线程就会一直 wile 循环,不做任何事情,所以就被称为「忙等待锁」,也被称为自旋锁(*spin lock*)。
无等待锁顾明思议就是获取不到锁的时候,不用自旋。
既然不想自旋,那当没获取到锁的时候,就把当前线程放入到锁的等待队列,然后执行调度程序,把 CPU 让给其他线程执行。
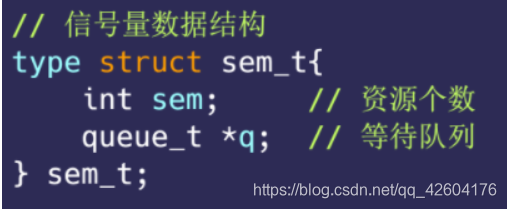
信号量表示资源的数量,对应的变量是一个整型(sem)变量
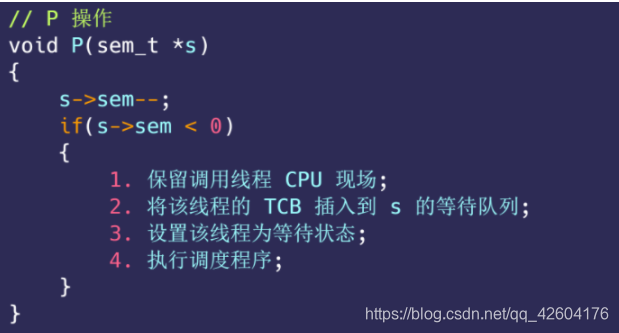
- P 操作:将
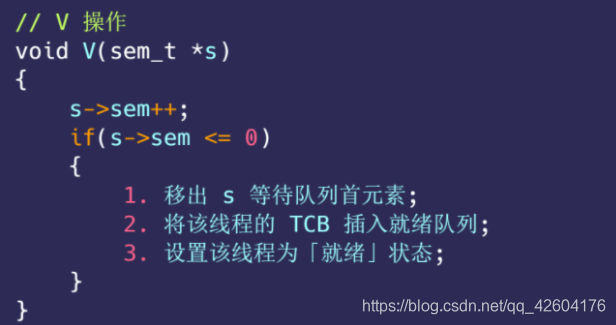
sem减1,相减后,如果sem < 0,则进程/线程进入阻塞等待,否则继续,表明 P 操作可能会阻塞; - V 操作:将
sem加1,相加后,如果sem <= 0,唤醒一个等待中的进程/线程,表明 V 操作不会阻塞;
对于两个并发线程,互斥信号量的值仅取 1、0 和 -1 三个值,分别表示:
如果互斥信号量为 1,表示没有线程进入临界区;
如果互斥信号量为 0,表示有一个线程进入临界区;
如果互斥信号量为 -1,表示一个线程进入临界区,另一个线程等待进入。
通过互斥信号量的方式,就能保证临界区任何时刻只有一个线程在执行,就达到了互斥的效果。
生产者与消费者
- 生产者在生成数据后,放在一个缓冲区中;
- 消费者从缓冲区取出数据处理;
- 任何时刻,只能有一个生产者或消费者可以访问缓冲区;
- 任何时刻只能有一个线程操作缓冲区,说明操作缓冲区是临界代码,需要互斥;
- 缓冲区空时,消费者必须等待生产者生成数据;缓冲区满时,生产者必须等待消费者取出数据。说明生产者和消费者需要同步。
我们需要三个信号量 :
互斥信号量 mutex:用于互斥访问缓冲区,初始化值为 1
资源信号量 fullBuffers:用于消费者询问缓冲区是否有数据,有数据则读取数据,初始化值为 0(表明缓冲区一开始为空);
资源信号量 emptyBuffers:用于生产者询问缓冲区是否有空位,有空位则生成数据,初始化值为 n (缓冲区大小);

哲学家就餐问题
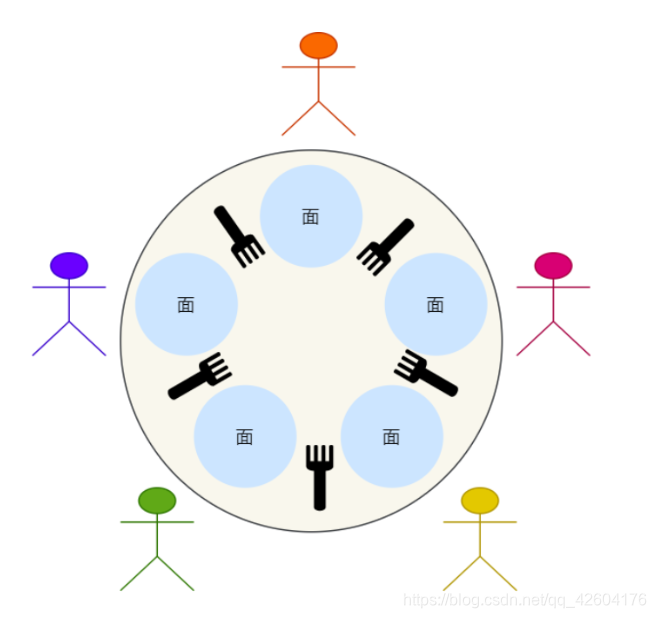
5个老大哥哲学家,闲着没事做,围绕着一张圆桌吃面;- 巧就巧在,这个桌子只有
5支叉子,每两个哲学家之间放一支叉子; - 哲学家围在一起先思考,思考中途饿了就会想进餐;
- 奇葩的是,这些哲学家要两支叉子才愿意吃面,也就是需要拿到左右两边的叉子才进餐;
- 吃完后,会把两支叉子放回原处,继续思考;
那么问题来了,如何保证哲 学家们的动作有序进行,而不会出现有人永远拿不到叉子呢?
让偶数编号的哲学家「先拿左边的叉子后拿右边的叉子」,奇数编号的哲学家「先拿右边的叉子后拿左边的叉子」
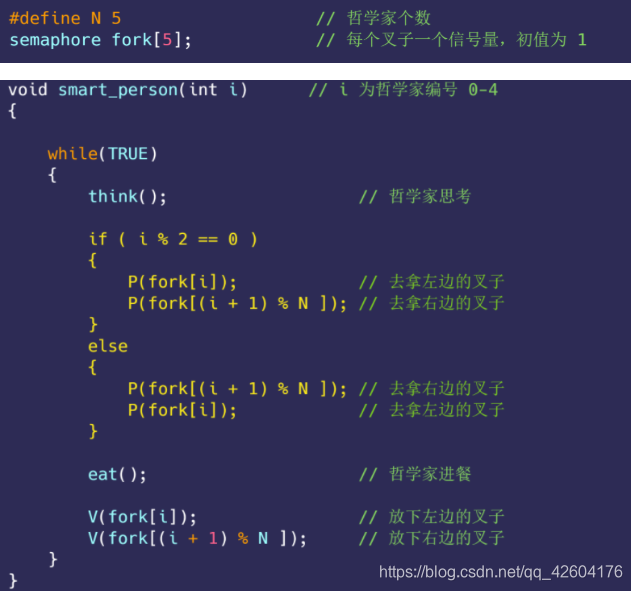
上面的程序,在 P 操作时,根据哲学家的编号不同,拿起左右两边叉子的顺序不同。另外,V 操作是不需要分支的,因为 V 操作是不会阻塞的。
读者写者问题
读者只会读取数据,不会修改数据,而写者即可以读也可以修改数据。
不谈读优先于写优先锁,直接谈公平读写锁。
公平策略 :
开始来了一些读者读数据,它们全部进入读者队列,此时来了一个写者,执行 P(falg) 操作,使得后续到来的读者都阻塞在 flag 上,不能进入读者队列,这会使得读者队列逐渐为空,即 rCount 减为 0。
这个写者也不能立马开始写(因为此时读者队列不为空),会阻塞在信号量 wDataMutex 上,读者队列中的读者全部读取结束后,最后一个读者进程执行 V(wDataMutex),唤醒刚才的写者,写者则继续开始进行写操作。
为此时读者队列不为空),会阻塞在信号量 wDataMutex 上,读者队列中的读者全部读取结束后,最后一个读者进程执行 V(wDataMutex),唤醒刚才的写者,写者则继续开始进行写操作。
进程间通信
每个进程的用户地址空间都是独立的,一般而言是不能互相访问的,但内核空间是每个进程都共享的,所以进程之间要通信必须通过内核。
管道
管道传输数据是单向的,如果想相互通信,我们需要创建两个管道才行。
匿名管道,用完了就销毁。
命名管道,也被叫做 FIFO,因为数据是先进先出的传输方式
只有当管道里的数据被读完后,命令才可以正常退出。
管道这种通信方式效率低,不适合进程间频繁地交换数据。当然,它的好处,自然就是简单,同时也我们很容易得知管道里的数据已经被另一个进程读取了。
对于匿名管道,它的通信范围是存在父子关系的进程。因为管道没有实体,也就是没有管道文件,只能通过 fork 来复制父进程 fd 文件描述符,来达到通信的目的。
对于命名管道,它可以在不相关的进程间也能相互通信。因为命令管道,提前创建了一个类型为管道的设备文件,在进程里只要使用这个设备文件,就可以相互通信。
消息队列
A 进程要给 B 进程发送消息,A 进程把数据放在对应的消息队列后就可以正常返回了,B 进程需要的时候再去读取数据就可以了。
消息队列是保存在内核中的消息链表,在发送数据时,会分成一个一个独立的数据单元,也就是消息体(数据块),消息体是用户自定义的数据类型,消息的发送方和接收方要约定好消息体的数据类型,所以每个消息体都是固定大小的存储块,不像管道是无格式的字节流数据。如果进程从消息队列中读取了消息体,内核就会把这个消息体删除。
消息队列不适合比较大数据的传输,因为在内核中每个消息体都有一个最大长度的限制,同时所有队列所包含的全部消息体的总长度也是有上限。
消息队列通信过程中,存在用户态与内核态之间的数据拷贝开销,因为进程写入数据到内核中的消息队列时,会发生从用户态拷贝数据到内核态的过程,同理另一进程读取内核中的消息数据时,会发生从内核态拷贝数据到用户态的过程。
共享内存
共享内存的机制,就是拿出一块虚拟地址空间来,映射到相同的物理内存中。
这样这个进程写入的东西,另外一个进程马上就能看到了,都不需要拷贝来拷贝去,传来传去,大大提高了进程间通信的速度。
信号量
了防止多进程竞争共享资源,而造成的数据错乱,所以需要保护机制,使得共享的资源,在任意时刻只能被一个进程访问。正好,信号量就实现了这一保护机制。
信号量其实是一个整型的计数器,主要用于实现进程间的互斥与同步,而不是用于缓存进程间通信的数据。
控制信号量的方式有两种原子操作 :
一个是 P 操作,这个操作会把信号量减去 -1,相减后如果信号量 < 0,则表明资源已被占用,进程需阻塞等待;相减后如果信号量 >= 0,则表明还有资源可使用,进程可正常继续执行。
另一个是 V 操作,这个操作会把信号量加上 1,相加后如果信号量 <= 0,则表明当前有阻塞中的进程,于是会将该进程唤醒运行;相加后如果信号量 > 0,则表明当前没有阻塞中的进程;
P 操作是用在进入共享资源之前,V 操作是用在离开共享资源之后,这两个操作是必须成对出现的 。
两个进程互斥访问共享内存,我们可以初始化信号量为 1。
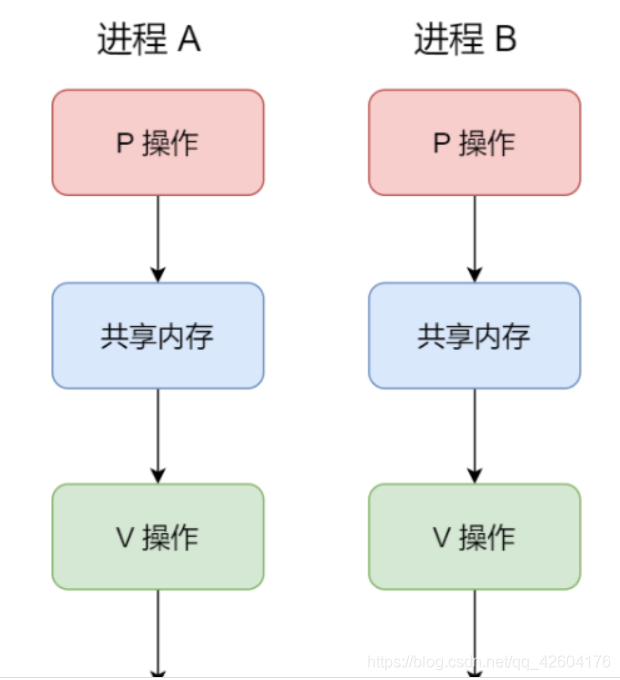
进程 A 在访问共享内存前,先执行了 P 操作,由于信号量的初始值为 1,故在进程 A 执行 P 操作后信号量变为 0,表示共享资源可用,于是进程 A 就可以访问共享内存。
若此时,进程 B 也想访问共享内存,执行了 P 操作,结果信号量变为了 -1,这就意味着临界资源已被占用,因此进程 B 被阻塞。
直到进程 A 访问完共享内存,才会执行 V 操作,使得信号量恢复为 0,接着就会唤醒阻塞中的线程 B,使得进程 B 可以访问共享内存,最后完成共享内存的访问后,执行 V 操作,使信号量恢复到初始值 1。
信号初始化为 1,就代表着是互斥信号量,它可以保证共享内存在任何时刻只有一个进程在访问,这就很好的保护了共享内存。
进程 A 是负责生产数据,而进程 B 是负责读取数据,这两个进程是相互合作、相互依赖的,进程 A 必须先生产了数据,进程 B 才能读取到数据,所以执行是有前后顺序的。
信号量来实现多进程同步的方式,我们可以初始化信号量为 0。
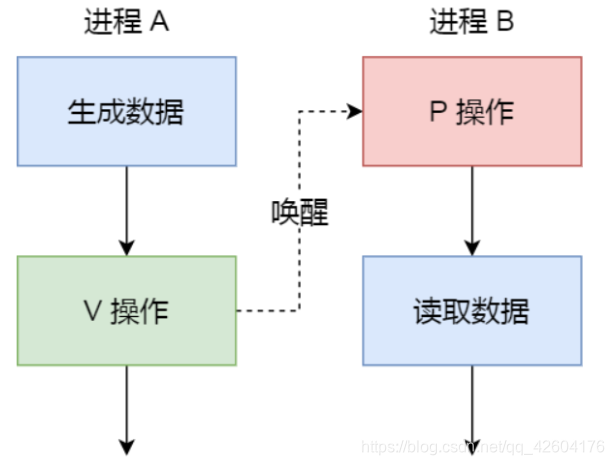
如果进程 B 比进程 A 先执行了,那么执行到 P 操作时,由于信号量初始值为 0,故信号量会变为 -1,表示进程 A 还没生产数据,于是进程 B 就阻塞等待;
接着,当进程 A 生产完数据后,执行了 V 操作,就会使得信号量变为 0,于是就会唤醒阻塞在 P 操作的进程 B;
最后,进程 B 被唤醒后,意味着进程 A 已经生产了数据,于是进程 B 就可以正常读取数据了。
信号
对于异常情况下的工作模式,就需要用「信号」的方式来通知进程。
信号是进程间通信机制中唯一的异步通信机制,因为可以在任何时候发送信号给某一进程,一旦有信号产生,我们就有下面这几种,用户进程对信号的处理方式。
用户进程对信号的处理方式 :
1.执行默认操作。
2.捕捉信号。 为信号定义一个信号处理函数。当信号发生时,我们就执行相应的信号处理函数
3.忽略信号
Socket
跨网络与不同主机上的进程之间通信,就需要 Socket 通信了。
锁
互斥锁与自旋锁
加锁的目的就是保证共享资源在任意时间里,只有一个线程访问,这样就可以避免多线程导致共享数据错乱的问题。
-
互斥锁加锁失败后,线程会释放 CPU ,给其他线程;
-
自旋锁加锁失败后,线程会忙等待,直到它拿到锁;
互斥锁是一种「独占锁」,比如当线程 A 加锁成功后,此时互斥锁已经被线程 A 独占了,只要线程 A 没有释放手中的锁,线程 B 加锁就会失败,于是就会释放 CPU 让给其他线程,既然线程 B 释放掉了 CPU,自然线程 B 加锁的代码就会被阻塞。
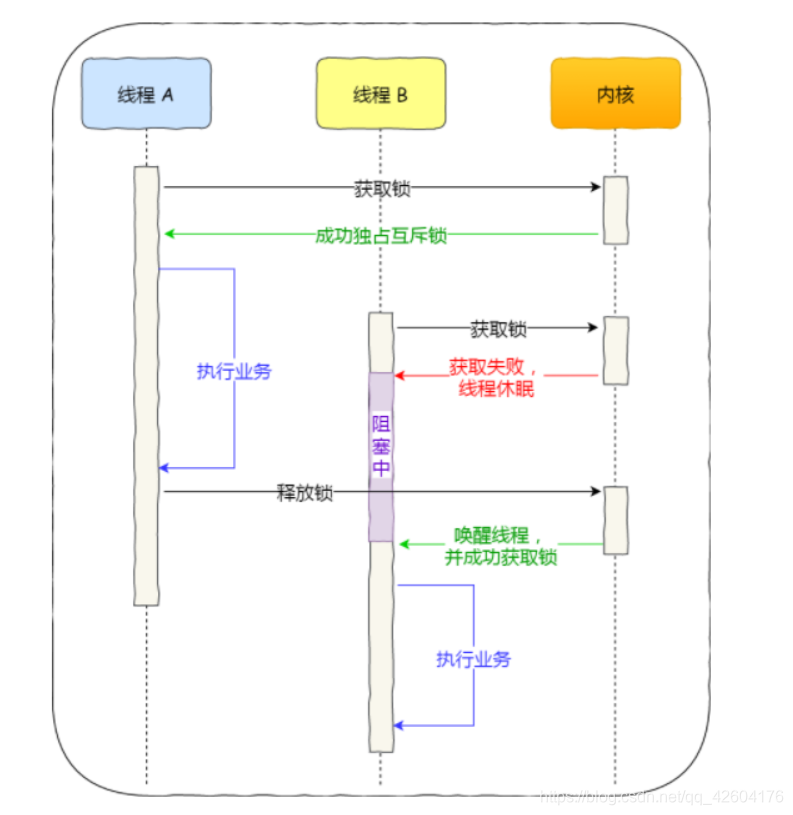
互斥锁加锁失败时,会从用户态陷入到内核态,让内核帮我们切换线程,虽然简化了使用锁的难度,但是存在一定的性能开销成本。 会有两次线程上下文切换的成本 。
如果你能确定被锁住的代码执行时间很短,就不应该用互斥锁,而应该选用自旋锁,否则使用互斥锁。
自旋锁 在「用户态」完成加锁和解锁操作,不会主动产生线程上下文切换,所以相比互斥锁来说,会快一些,开销也小一些 。
使用自旋锁的时候,当发生多线程竞争锁的情况,加锁失败的线程会「忙等待」,直到它拿到锁。
自旋锁是最比较简单的一种锁,一直自旋,利用 CPU 周期,直到锁可用。需要注意,在单核 CPU 上,需要抢占式的调度器(即不断通过时钟中断一个线程,运行其他线程)。否则,自旋锁在单 CPU 上无法使用,因为一个自旋的线程永远不会放弃 CPU。
读写锁
读写锁适用于能明确区分读操作和写操作的场景。
读写锁从字面意思我们也可以知道,它由「读锁」和「写锁」两部分构成,如果只读取共享资源用「读锁」加锁,如果要修改共享资源则用「写锁」加锁。
读写锁的工作原理是:
当「写锁」没有被线程持有时,多个线程能够并发地持有读锁。
但是,一旦「写锁」被线程持有后,读线程的获取读锁的操作会被阻塞,而且其他写线程的获取写锁的操作也会被阻塞。
读写锁在读多写少的场景,能发挥出优势。
读写锁可以分为「读优先锁」和「写优先锁」。
「读优先锁」
当读线程 A 先持有了读锁,写线程 B 在获取写锁的时候,会被阻塞,并且在阻塞过程中,后续来的读线程 C 仍然可以成功获取读锁,最后直到读线程 A 和 C 释放读锁后,写线程 B 才可以成功获取写锁。
「写优先锁」
当读线程 A 先持有了读锁,写线程 B 在获取写锁的时候,会被阻塞,并且在阻塞过程中,后续来的读线程 C 获取读锁时会失败,于是读线程 C 将被阻塞在获取读锁的操作,这样只要读线程 A 释放读锁后,写线程 B 就可以成功获取读锁。
「公平读写锁」
公平读写锁比较简单的一种方式是:用队列把获取锁的线程排队,不管是写线程还是读线程都按照先进先出的原则加锁即可,这样读线程仍然可以并发,也不会出现「饥饿」的现象。
乐观锁与悲观锁
互斥锁、自旋锁、读写锁,都是属于悲观锁 。
悲观锁做事比较悲观,它认为多线程同时修改共享资源的概率比较高,于是很容易出现冲突,所以访问共享资源前,先要上锁。
那相反的,如果多线程同时修改共享资源的概率比较低,就可以采用乐观锁。
乐观锁做事比较乐观,它假定冲突的概率很低,它的工作方式是:先修改完共享资源,再验证这段时间内有没有发生冲突,如果没有其他线程在修改资源,那么操作完成,如果发现有其他线程已经修改过这个资源,就放弃本次操作。
乐观锁全程并没有加锁,所以它也叫无锁编程。
只有在冲突概率非常低,且加锁成本非常高的场景时,才考虑使用乐观锁。
死锁
当线程A持有一个资源A,正在等待获取资源B;而线程B持有资源B,却在等待获取资源A,死锁就产生了。
产生条件:
- 互斥:多个线程对于需要的资源进行互斥的访问(生产者和消费者竞争一个mutex锁)
- 非抢占:线程在竞争到资源后,不能被抢占(消费者抢到mutex,迫使生产者等待)
- 持有并等待:线程在竞争中持有了资源,同时有在等待其他资源。(消费者获得mutex锁后,等待生产者的sem_post(¬_empty))
- 环路等待:线程之间存在一个环路,环路上每个线程都负责控制一个资源,但这个资源又是下一个线程所要申请的。
方法一 . 破坏互斥条件
如果我们能在两个线程跑之前,能给每个线程单独拷贝一份资源AB的副本,就能有效的避免死锁了 。
方法二. 破坏环路等待条件
可以强制规定任何线程取资源的顺序只能是 “先取A再取B”的话,就能避免死锁了 .
方法三.破坏不剥夺条件
除非线程自己还资源,否则线程会一直占有资源,是形成不可剥夺条件的原因 。 可以通过设置一个”最长占用时间“的阈值来解决这个问题 。如果过了10分钟仍然没有进入下一个步骤,则归还已有的资源。
方法四.破坏请求和保持条件
这里我们可以通过规定在任何情况下,一个线程获取一个资源之后,必须归还了资源之后才能请求另一个资源,就可以有效解决这个问题。