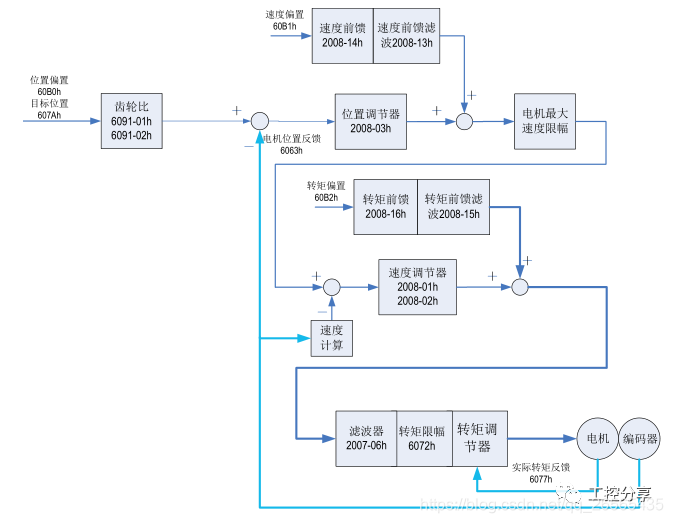
周期同步位置模式(csp)
周期同步位置模式下,上位控制器完成位置指令规划,然后将规划好的目标位置 607Ah 上以周期性同步的方式发送给伺服驱动器,位置、速度、转矩控制由伺服驱动器内部完成
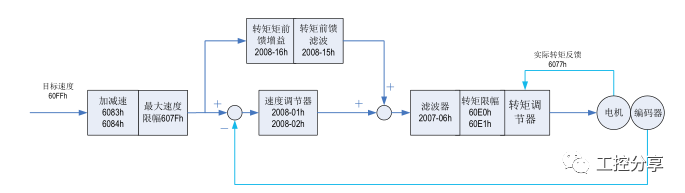
周期同步速度模式(csv)
周期同步速度模式下,上位控制器将计算好的目标速度 60FF 周期性同步的发送给伺服驱动器,速度、转矩调节由伺服内部执行。

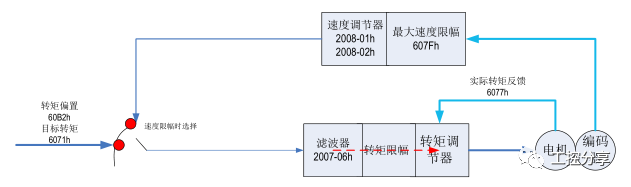
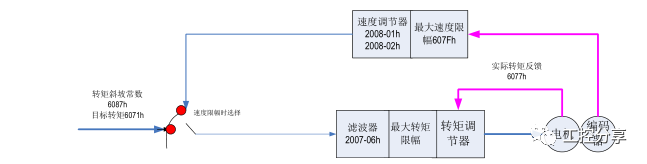
周期同步转矩模式(cst)
此模式下,上位控制器将计算好的目标转矩 6071h 周期性同步的发送给伺服驱动器,转矩调节由伺服内部执行。当速度达到限幅值后将进入调速阶段
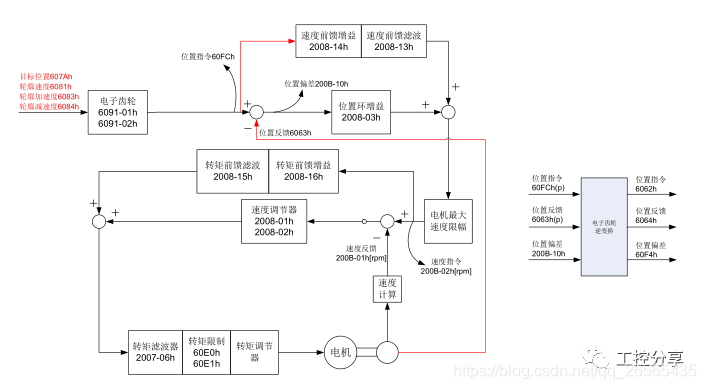
轮廓位置模式(pp)
此模式主要用于点对点定位应用。此模式下,上位机给目标位置 ( 绝对或者相对 )、位置曲线的速度、加减速及减速度,伺服内部的轨迹发生器将根据设置生成目标位置曲线指令,驱动器内部完成位置控制,速度控制,转矩控制
轮廓速度模式(pv)
此模式下,上位控制器将目标速度、加速度、减速度发送给伺服驱动器,速度、转矩调节由伺服内部执行
轮廓转矩模式(pt)
此模式下,上位控制器将目标转矩 6071h、转矩斜坡常数 6087h 发送给伺服驱动器,转矩调节由伺服内部执行。当速度达到限幅值将进入调速阶段。
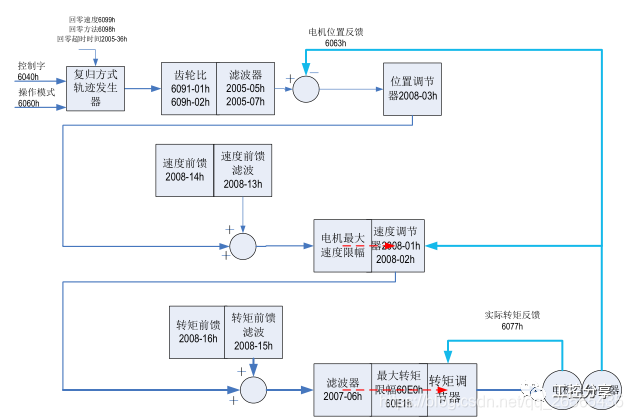
原点回归模式 (hm)
原点回零模式用于寻找机械原点,并定位机械原点与机械零点的位置关系。