前言
逼近多边形是某个图像轮廓的高度近似,而凸包的提出是为了简化逼近多边形的。其实,凸包跟逼近多边形很像,只不过它是物体最外层的“凸”多边形。
简单的概括,凸包是指完全包含原有轮廓,并且仅由轮廓上的点所构成的多边形。凸包的特点是每一处都是凸的,即在凸包内连接任意两点的直线都在凸包的内部,并且任意连续3个点的内角小于180度。
在OpenCV中,它给我们提供cv2.convexHull()来获取轮廓的凸包。其完整定义如下:
def convexHull(points, hull=None, clockwise=None, returnPoints=None):
points:轮廓
hull:返回值,为凸包角点。可以理解为多边形的点坐标,或索引。
clockwise:布尔类型,为True时,凸包角点将按顺时针方向排列;为False时,为逆时针。
returnPoints:布尔类型,默认值True,函数返回凸包角点的x/y坐标;为False时,函数返回轮廓中凸包角点的索引。
获取凸包角点
既然,我们已经了解了凸包的作用,并且理解了OpenCV提供的函数。下面,我们随便选取一张图,获取凸包角点。具体代码如下所示:
import cv2
img = cv2.imread("24.jpg")
cv2.imshow("img", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
hull=cv2.convexHull(contours[0])
print(hull)
这里,我们随便获取了一张图像,并获取其凸包的角点。运行之后,角点坐标如下:

如果修改参数returnPoints为False,会返回对应的6个索引值。
这里我们再添加一行代码就可以绘制凸包多边形了,具体添加的代码如下:
#获取hull之后
cv2.polylines(img, [hull], True, (0, 255, 0), 2)
cv2.imshow("img1", img)
运行之后,效果如下所示:

凸缺陷
凸包与轮廓之间的部分我们称之为凸缺陷。在OpenCV中使用函数cv2.convexityDefects()获取凸缺陷,其完整定义如下:
def convexityDefects(contour, convexhull, convexityDefects=None):
contour:轮廓
convexhull:凸包
convexityDefects:返回值,为凸缺陷点集。它是一个数组,返回的指包括[起点,终点,轮廓上的距离凸包最远点,最远点到凸包的近似距离]
特别注意,用该函数计算凸缺陷之前,我们需要使用函数cv2.convexHull()获取凸包,但其参数returnPoints必须为False。
下面,我们来使用该函数计算上图的凸缺陷。代码如下:
import cv2
img = cv2.imread("24.jpg")
cv2.imshow("img", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
hull = cv2.convexHull(contours[0], returnPoints=False)
defects = cv2.convexityDefects(contours[0], hull)
print(defects)
for i in range(defects.shape[0]):
s, e, f, d = defects[i, 0]
start = tuple(contours[0][s][0])
end = tuple(contours[0][e][0])
far = tuple(contours[0][f][0])
cv2.line(img, start, end, [0, 255, 0], 2)
cv2.circle(img, far, 5, [0, 0, 255], -1)
cv2.imshow("img1", img)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,效果如下:
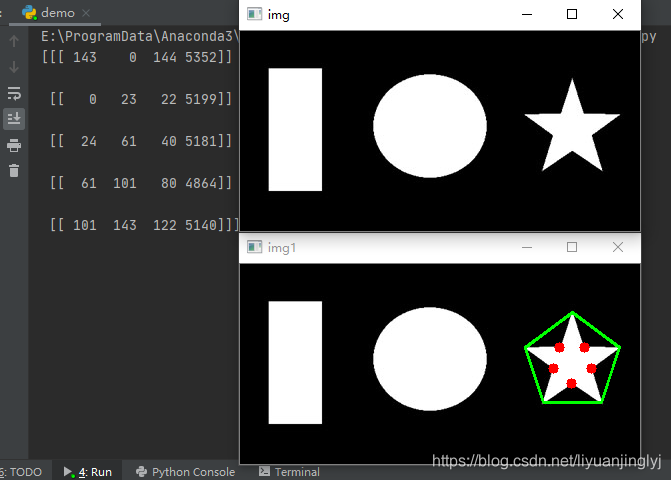
如上图所示,我们用点标记出来的凸缺陷,可以看到五角星的每个凹肩都是凸缺陷。
最后可以扩展以下,其中OpenCV提供函数cv2.isContourConvex()来判断轮廓是否是凸形的。同时,也提供了cv2.pointPolygonTest()函数来计算点到多边形(轮廓)的最短距离,也就是垂线距离,这个计算由称为点和多边形的关系测试。感兴趣的读者可以自己实验这两个方函数。