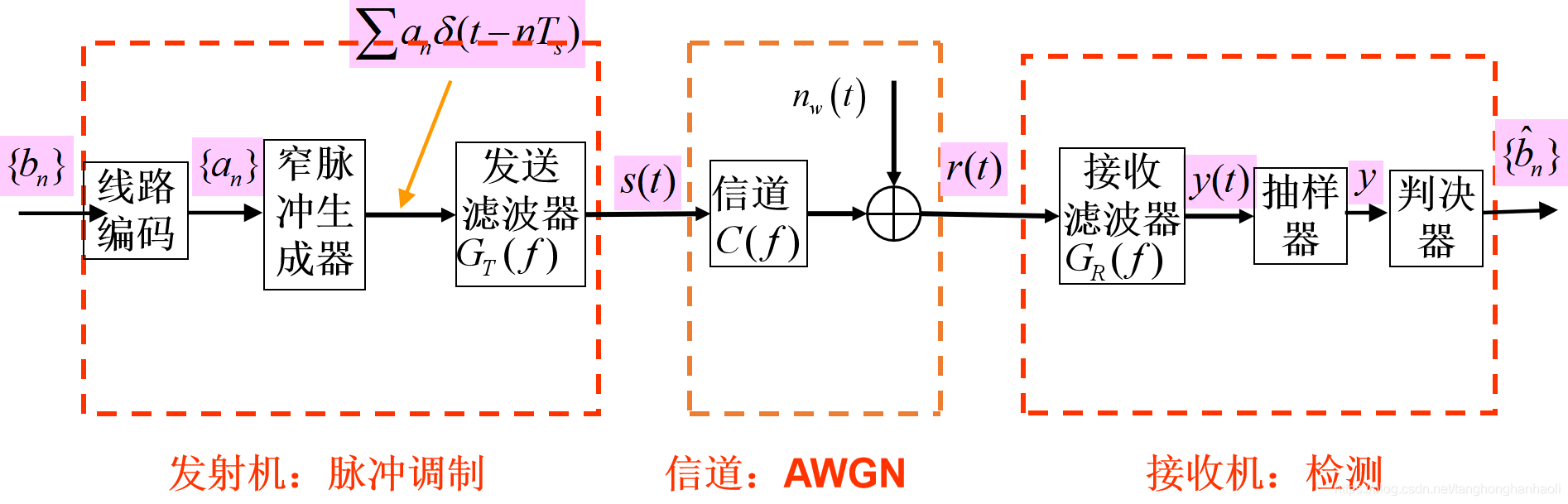
数字基带传输系统模型如图1所示。我们把它分成三个模块:发射机、信道、接收机,下面分别进行讨论。
1、发射机:脉冲调制
这里的发射机,也就是《现代通信原理9.1:数字系统通用模型》中介绍的脉冲调制模块,具体来说,它是把来自信源的二进制随机序列 { b n } \{b_n\} {
bn}变为信号波形 s ( t ) s(t) s(t)。
那么到底脉冲调制这个模块是如何实现从二进制序列到波形的变化呢?或者说,如何用具体的波形 s ( t ) s(t) s(t)来表达二进制随机序列 { b n } \{b_n\} {
bn}呢?
从图1中可以看出,脉冲调制模块包含三个子模块,即线路编码模块、窄脉冲生成模块、发送滤波器。下面我们就来看看它们如何实现从比特到波形的变化。
1.1 线路编码
线路编码模块的主要功能是,将二进制随机序列 { b n } \{b_n\} { bn}映射成电平 { a n } \{a_n\} { an},例如对于单极性码,将“0”映射为零电平,“1”映射为正电平;而对于双极性码,将“0”映射为负电平,“1”映射为正电平等。《现代通信原理9.3:常用线路编码码型》中将给出更详细的介绍。
1.2 窄脉冲生成
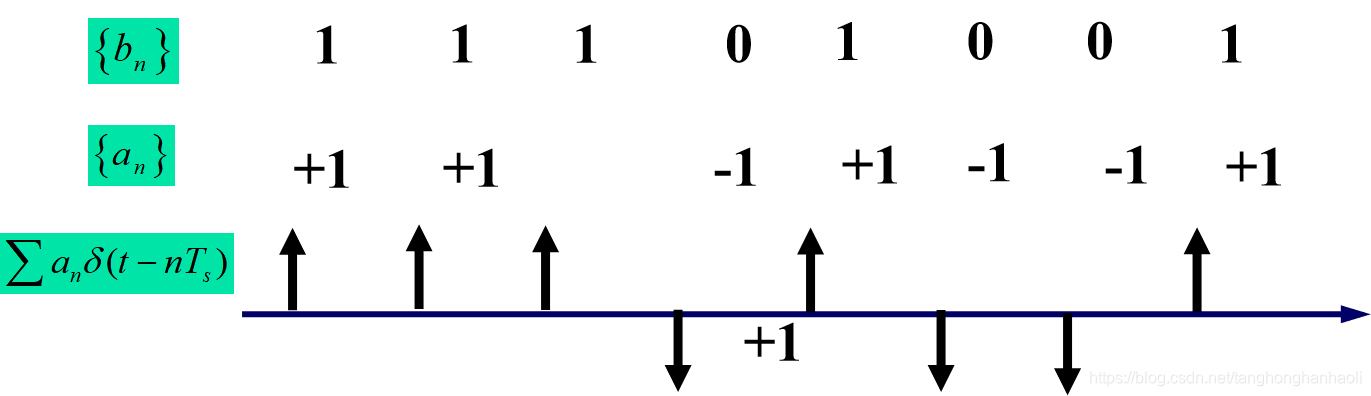
窄脉冲生成器的作用,是产生间隔为 T s T_s Ts的冲激序列,这里的 T s T_s Ts为码元间隔(即每个码元所对应的传输时间, r s = 1 T s r_s=\frac{1}{T_s} rs=Ts1为码元传输速率)。而第 n n n个冲激信号的强度,就是线路编码之后的电平 a n a_n an,因此窄脉冲生成器输出为
∑ n = − ∞ ∞ a n δ ( t − n T s ) , (1) \tag{1} \sum_{n=-\infty}^{\infty}a_n\delta(t-nT_s), n=−∞∑∞anδ(t−nTs),(1)图2为采用双极性传输时,窄脉冲生成器的输出示意图。显然,每两个冲激信号的间隔为 T s T_s Ts,强度为电平 { a n } \{a_n\} {
an}。
1.3 发送滤波器
事实上,真正决定发送信号波形的,是发送滤波器的冲激响应。下面我们来详细讨论。
发送滤波器的冲激响应和频率传递函数为傅立叶变换
g T ( t ) ↔ G T ( f ) . (2) \tag{2} g_T(t)\leftrightarrow G_T(f). gT(t)↔GT(f).(2)将窄脉冲生成器的输出信号(1),输入到发送滤波器之后,我们就可以得到发送波形 s ( t ) s(t) s(t)为
s ( t ) = ∑ n = − ∞ ∞ a n g T ( t − n T s ) . (3) \tag{3} s(t)=\sum_{n=-\infty}^{\infty}a_n g_T(t-nT_s). s(t)=n=−∞∑∞angT(t−nTs).(3)从图3中可以看到,将(a)图中所示的窄脉冲生成器输出信号通过冲激响应为(b)的发送滤波器,输出信号如图©所示;同理,若冲激响应如图(d)所示,则可以得到图(e)中所示的发送信号。
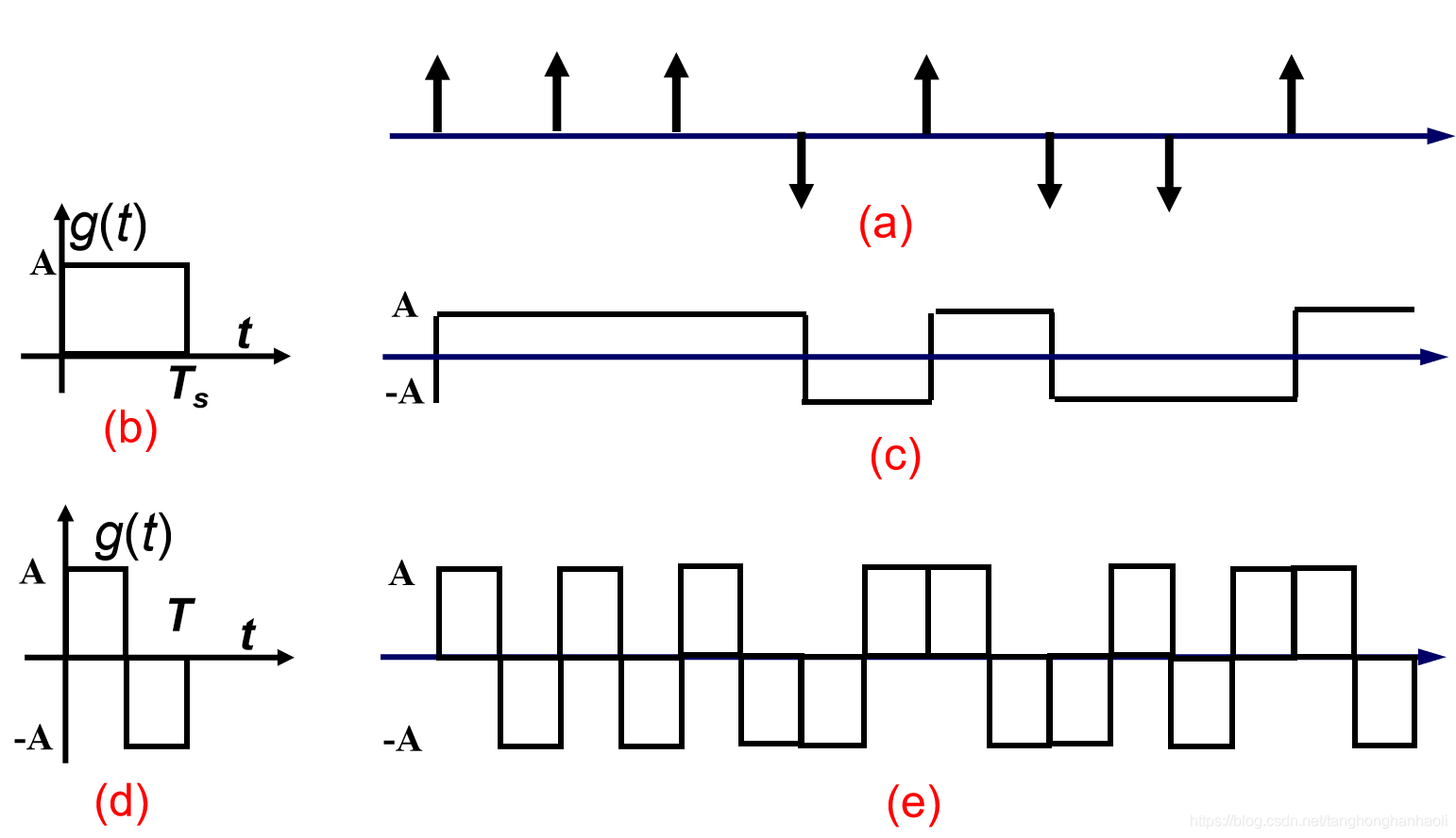
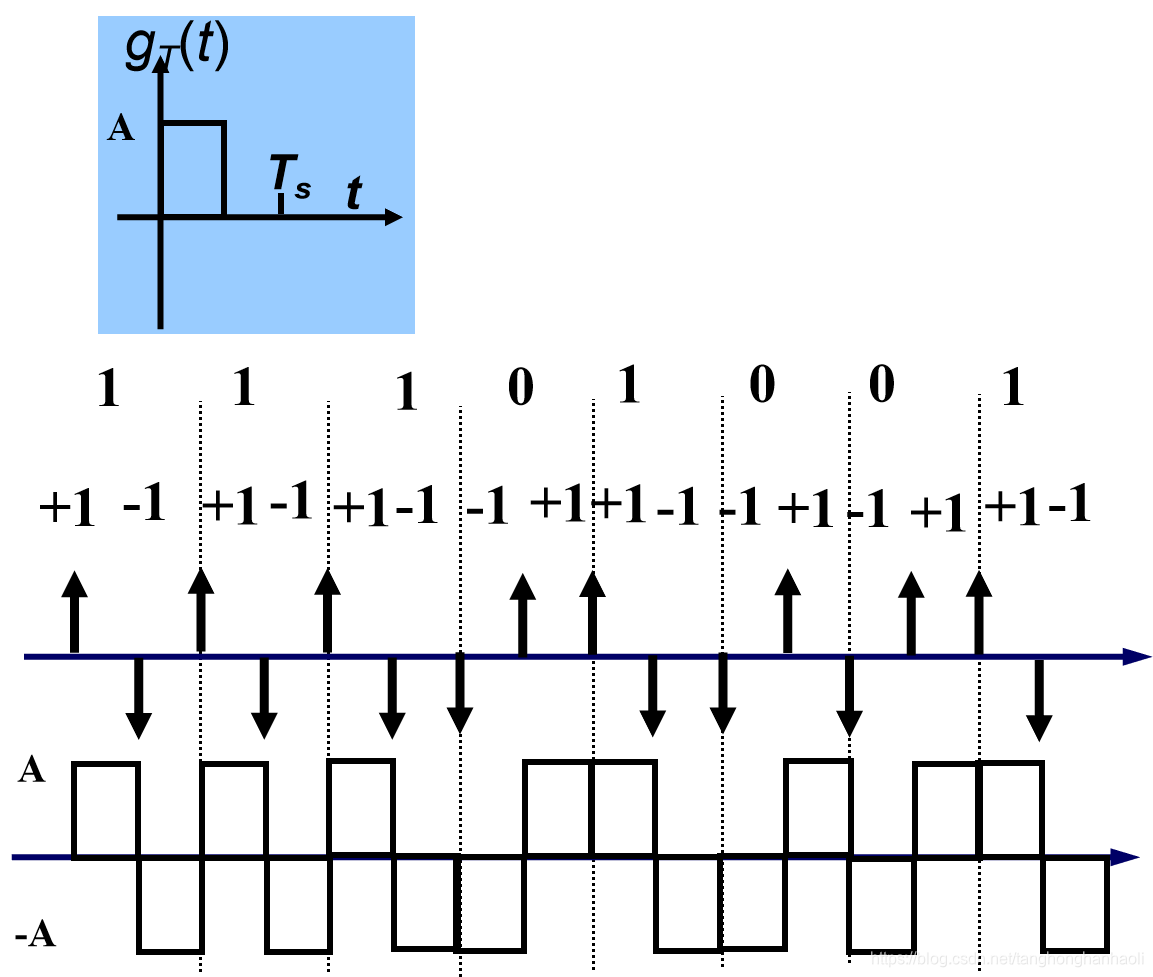
需要强调的一个问题是,在上述脉冲调制模型中,将基带信号波形的产生人为划分成线路编码和脉冲成型两个部分,但实际上这种划分过程并非唯一,也不是绝对的。从图4中可以看出,若我们采用的发送滤波器的冲激响应为持续时间为 T S 2 \frac{T_S}{2} 2TS的归零波形,同时在线路编码时,我们将"1"映射为+1+1,而将"0"映射为-1+1,此时同样可以生成图3(e)中的信号。
2、信道:AWGN信道
从图1来看,发射机(脉冲调制模块)产生的发送信号,首先经过信道,再进入接收机。在这门课程里面,我们主要考虑加性高斯白噪声(AWGN)信道,在移动通信等课程里面,会讨论更为复杂的衰落信道。
总体来看,我们将讨论两种AWGN信道,即带宽无限的AWGN信道,以及带宽有限的AWGN信道。
2.1 带宽无限AWGN信道
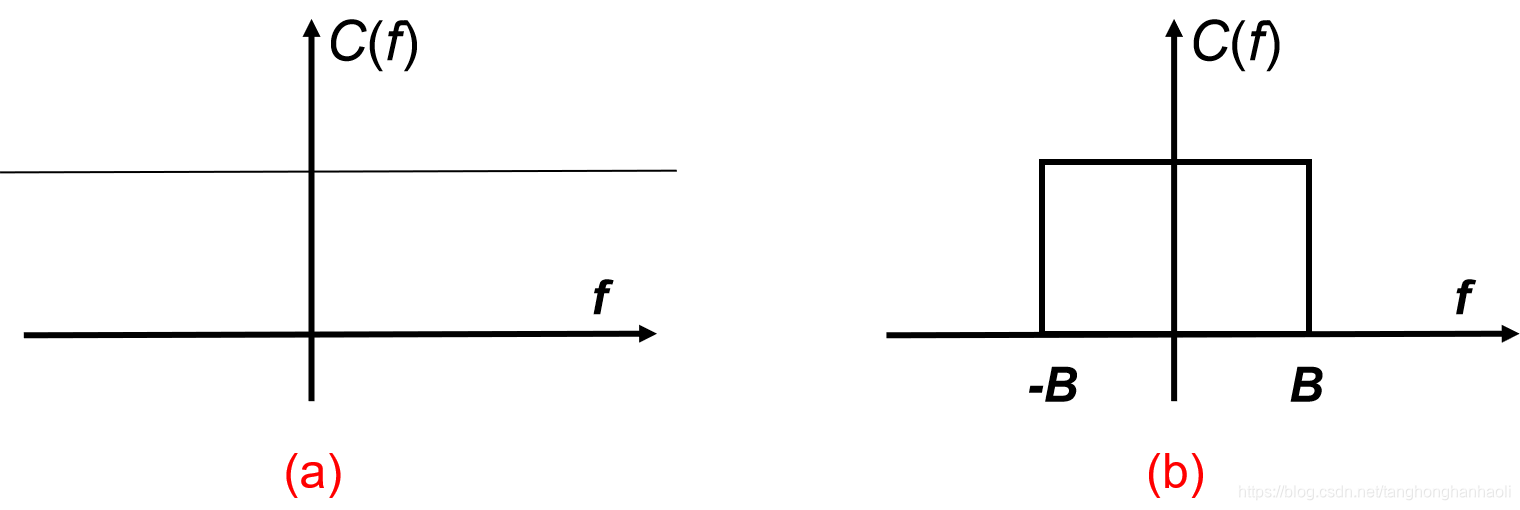
所谓带宽无限AWGN信道,是指信道模块的频率传递函数 C ( f ) C(f) C(f)在整个频率轴上都是一个恒定的值,如图5(a)所示。显然,对于这一类信道,发送信号 s ( t ) s(t) s(t)通过 C ( f ) C(f) C(f)时不会发生形状上的变化。进一步,信号在进入接收机之前,叠加加性高斯白噪声 n w ( t ) n_w(t) nw(t),因此我们可以得到接收信号为
r ( t ) = s ( t ) + n w ( t ) . (4) \tag{4} r(t)=s(t)+n_w(t). r(t)=s(t)+nw(t).(4)
2.2 带宽有限AWGN信道
所谓带宽有限AWGN信道,是指信道模块的频率传递函数 C ( f ) C(f) C(f)类似于理想低通滤波器,如图5(b)所示,其带宽为 B B B。显然,对于这一类信道,发送信号 s ( t ) s(t) s(t)通过 C ( f ) C(f) C(f)时,其波形及频谱会发生改变。我们可以得到接收信号为
r ( t ) = s ( t ) ∗ c ( t ) + n w ( t ) , (5) \tag{5} r(t)=s(t)*c(t)+n_w(t), r(t)=s(t)∗c(t)+nw(t),(5)这里 c ( t ) c(t) c(t)为信道模块的冲激响应。
3、接收机:检测
这里的接收机,也就是《现代通信原理9.1:数字系统通用模型》中介绍的检测模块,具体来说,它是把来自信道的信号波形 r ( t ) r(t) r(t)恢复成二进制序列 { b ^ n } \{\hat b_n\} {
b^n}。理想情况下, { b ^ n } \{\hat b_n\} {
b^n}应该与 { b n } \{b_n\} {
bn}完全相同,但由于噪声等影响,会发生误码。
这一部分,我们先简单介绍下检测的基本原理。在后面章节,再详细讨论接收滤波器的设计方法,以及误码率的理论分析方法。
信号进入接收机之后经过的第一个模块,是接收滤波器,其冲激响应和频率传函为
g R ( t ) ↔ G R ( f ) . (6) \tag{6} g_R(t)\leftrightarrow G_R(f). gR(t)↔GR(f).(6)
这里我们先提出一个问题,接收滤波器的作用是什么呢?我们会在《现代通信原理10.1:带宽无限信道二进制匹配滤波基带系统误码性能分析》这部分回答这个问题。
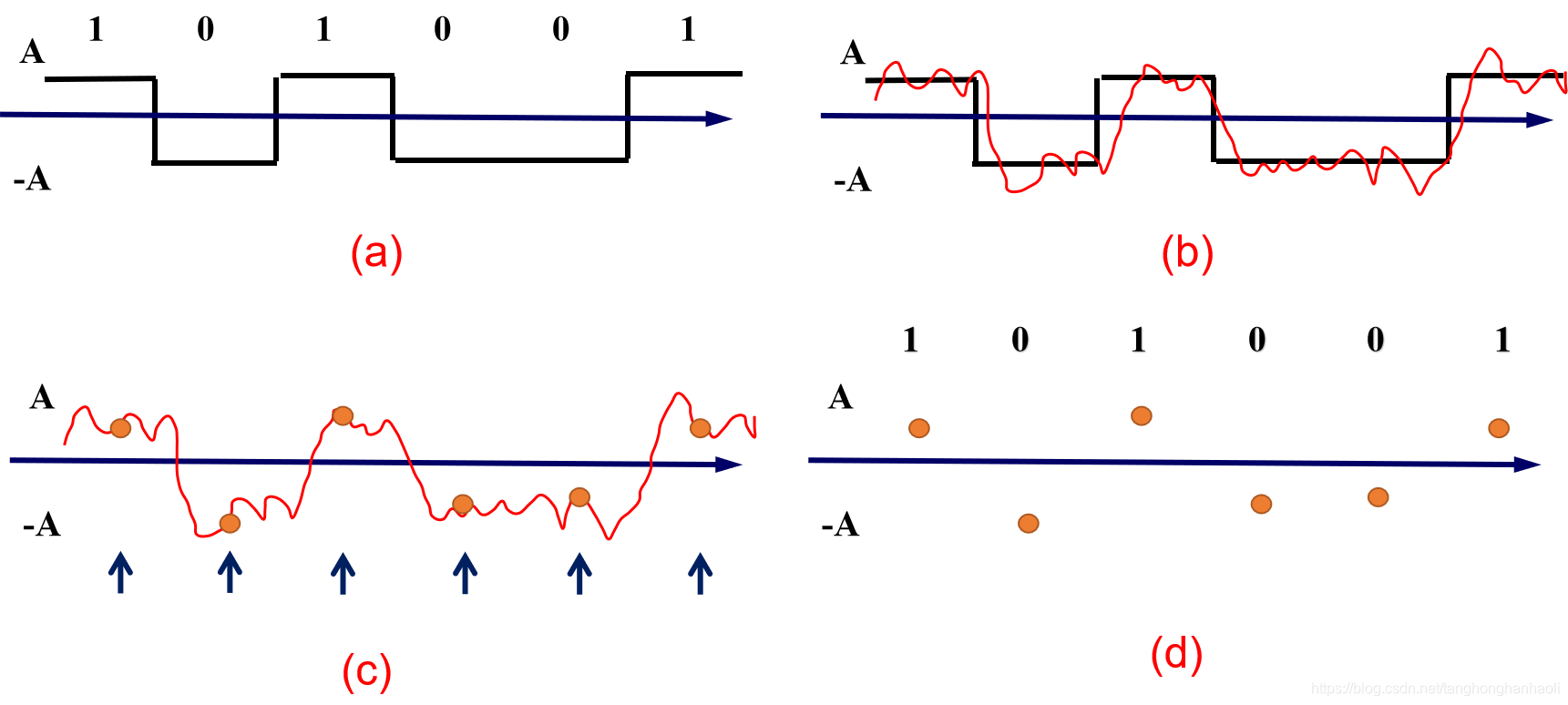
图6为检测器各点波形示意图。其中图6(a)为接收到的有用信号,为双极性方波;图6(b)为 r ( t ) r(t) r(t)经过接收滤波器之后,假定滤波器对有用信号波形没有影响,有用信号与低通白噪声叠加,得到图6(b)中红色波形;图6( c)表示对接收滤波器输出进行进行抽样,抽样间隔等于码元周期,即在每个码元上作一次抽样,就得到图6(d)中用原点表示的抽样值。显然,把这些抽样值与判决门限比较(这里取为零电平),就可以把原始发送的信息"101001"没有错误的恢复出来了。当然,如果瞬时噪声很大,使得某个本来应该为负的电平变成了正电平,则会将”0“误判为"1",就发生了误码。