说在开头的话:
其实这些最短路径的算法,包括常见的插点,边松弛(因为说他们的名字和他们的算法思想联系不起来,所以我都这样称呼,官方称呼是floyd dijstra),他们就提出的时候的思想来定义他们的优缺点(比如是否能解决图中存在负权边、能否解决图中存在负权回路),但是编程又不是单纯的实现,如果想避免它的缺陷,完全可以加入自己需要的判定方法来避免它们的缺陷。并不是说,非黑即白,硬给他们划阵营。这样来总结更客观一些,因为我发现编程的时候可以既使用这个算法,又可以避免它本身的缺陷。下面代码纯属本人敲着玩的,一个小时之内连着敲出来的,如有错误的地方,或者值得优化的地方请留言。
几个概念:
负权回路:
在一个图里每条边都有一个值(有正有负)
如果存在一个环(从某个点出发又回到自己的路径),而权且这个环上所有权值之和是负数,那这就是一个负权环,也叫负权回路
存在负权回路的图是不能求两点间最短路的,因为只要在负权回路上不断兜圈子,所得的最短路长度可以任意小。
权值为负数的路径称为负权边,非负权回路可能有负权边。
负权边和负权回路这两个定义要搞清楚。
稠密图和稀疏图:
一个图中,顶点数 n 边数 m

当>>m 时,我们称之为稀疏。
当m相对较大时,我们称之为稠密。
插点法(Floyd算法)
Floyd算法的核心思想就是插点,将所有的点依次插入任意两个点之间,以达到图中任意两个点之间的路径最短。
核心算法:
for(int p=1;p<=n;p++)
for(int i=1; i<=n; i++)
{
for(int j=1; j<=n; j++)
{
if(map[i][p]+map[p][j]<map[i][j])
{
map[i][j]=map[i][p]+map[p][j];
}
}
}测试程序:
#include<stdio.h>
#include<string.h>
#include<algorithm>
#include<iostream>
using namespace std;
int n,m;
int map[50][50];
int book[50];
int main()
{
scanf("%d %d",&n,&m);
for(int i=1; i<=n; i++)
{
for(int j=1; j<=n; j++)
{
map[i][j]=99999999;
if(i==j)
map[i][j]=0;
}
}
for(int i=1; i<=m; i++)
{
int a,b,c;
scanf("%d %d %d",&a,&b,&c);
map[a][b]=c;
}
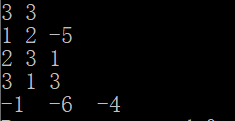
// 插点法在a+b<|-c|时不能解决负权回路 负权回路会导致路径越来越短,没有最短路径
//3 3
//1 2 2
//2 3 3
//3 1 -6
//for(int q=1;q<=n;q++)
for(int p=1;p<=n;p++)
for(int i=1; i<=n; i++)
{
for(int j=1; j<=n; j++)
{
if(map[i][p]+map[p][j]<map[i][j])
{
map[i][j]=map[i][p]+map[p][j];
}
}
}
for(int i=1;i<=n;i++)
{
for(int j=1;j<=n;j++)
{
printf("%12d ",map[i][j]);
}
cout<<"\n";
}
}
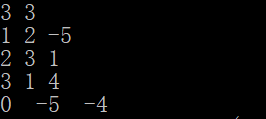
测试结果:

时间复杂度:
空间复杂度:
适用情况: 由于时间/空间复杂度 和顶点数量直接相关,所以适用于稠密图,即边越多越划算。
解决问题:多源最短路
附: 如果图中存在负权边,并且负权边构成了回路,但是该回路不是负权回路,那插点法就可以求得多源最短路径。如果存在负权回路,经过实验,不能求得最短路径。(如果需要求最短路径,需要自己想办法看看如果避免它的缺陷)
边松弛法(Dijkstra算法)
边松弛法是逐一将源点到各个端点的最短边(一轮只有一条边)插入到其它各个端点之间,用来松弛源点到其它端点的路径,达到源点到各个端点都是最短路径的目的。
核心算法:
int N=n;
while(N--)
{
minn=99999999;
for(int i=1; i<=n; i++)
{
if(dis[i]<minn && book[i]==0)
{
minn=dis[i];
flag=i;
}
}
book[flag]=1;
for(int i=1; i<=n; i++)
if(book[i]==0)
{
dis[i]=min(dis[flag]+map[flag][i],map[1][i]);
}
}测试程序:
#include<stdio.h>
#include<string.h>
#include<algorithm>
#include<iostream>
using namespace std;
int n,m;
int map[50][50];
int book[50];
int dis[50];
int minn=99999999;
int main()
{
scanf("%d %d",&n,&m);
for(int i=1; i<=n; i++)
{
for(int j=1; j<=n; j++)
{
map[i][j]=99999999;
if(i==j)
map[i][j]=0;
}
}
for(int i=1; i<=m; i++)
{
int a,b,c;
scanf("%d %d %d",&a,&b,&c);
map[a][b]=c;
}
for(int i=1; i<=n; i++)
{
dis[i]=map[1][i];
}
//3 3
//1 2 -10
//2 3 -3
//3 1 -5
int flag=0;
int N=n;
while(N--)
{
minn=99999999;
for(int i=1; i<=n; i++)
{
if(dis[i]<minn && book[i]==0)
{
minn=dis[i];
flag=i;
}
}
book[flag]=1;
for(int i=1; i<=n; i++)
if(book[i]==0)
{
dis[i]=min(dis[flag]+map[flag][i],map[1][i]);
}
}
for(int i=1;i<=n;i++)
cout<<dis[i]<<" ";
cout<<endl;
}
测试结果:

空间复杂度 O(M) 我的时间复杂度O()
时间复杂度O((M+N)logN) 我的空间复杂度O()
适用于稠密图(顶点一定的情况下,边越多越划算)
存在负权边的情况下,不能算出最短路径 我经过实验发现能算出来,不只是负权边,负权回路都没问题。
解决问题:单源最短路
附:
N:图中顶点个数
M:图中边的个数
在这样的时间复杂度下,边越多才越划算,如果像算法导论写的,将时间复杂度用堆优化到O((M+N)logN),那边多了,M比N可能大的多,根据边与顶点的关系,边最多能达到,时间复杂度反而不如我的。
点松弛法(Bellman_Ford算法)
它的思想同样是边松弛(我认为点松弛法更符合它的特点),但不是逐一将源点到各个端点的最短路径(一轮只有一条边) 用来 松弛源点到其它各个顶点的路径。而是将源点的出边(一轮,可能有多条)作为最短路径,松弛到其它各个顶点的路径,而后,将这些邻点的出边为最短路径,松弛其它顶点,直到源点到所有顶点都达到了最短路径。
核心算法:
for(int r=1; r<=n-1; r++)
{
for(int i=1; i<=m; i++)
{
dis[v[i]]=min(dis[v[i]],dis[u[i]]+w[i]);
}
}测试程序:
#include<stdio.h>
#include<string.h>
#include<iostream>
using namespace std;
int u[100],v[100],w[100];
int dis[100];
int book[100];
int flag;
int main()
{
int n,m;
scanf("%d %d",&n,&m);
for(int i=1; i<=m; i++)
scanf("%d %d %d",&u[i],&v[i],&w[i]);
for(int i=1; i<=m; i++)
{
if(i==1)
dis[i]=0;
else
dis[i]=99999999;
}
for(int r=1; r<=n-1; r++)
{
flag=0;
for(int i=1; i<=m; i++)
{
dis[v[i]]=min(dis[v[i]],dis[u[i]]+w[i]);
}
for(int i=1; i<=n; i++)
{
if(book[i]!=dis[i])
{
flag=1;
break;
}
}
if(flag==0)
break;
for(int i=1; i<=n; i++)
{
book[i]=dis[i];
}
}
for(int i=1; i<=m; i++)
{
if(dis[v[i]]>dis[u[i]]+w[i])
{
dis[v[i]]=dis[u[i]]+w[i];
flag=1;
}
}
if(flag==1)
cout<<"存在负权回路"<<endl;
else
for(int i=1; i<=n; i++)
{
cout<<dis[i]<<" ";
}
}空间复杂度 O(M)
时间复杂度O(NM)
和边有关,顶点一定,边越少,越划算。
负权边可以正常求得最短路径,负权回路甚至可以检测出来。
用来解决单源最短路问题。
队列加速下的点松弛法(SPFA(Shortest Path Faster Algorithm))
spfa是队列优化下的bellman_ford算法,在bellman_ford算法中,每实施一次松弛操作,就会有得到一些源点到某些顶点之间的最短路,此后这些最短路就不会发生改变,不再受后续松弛操作的影响。为了去掉多余的操作,每次仅对最短路值(源点到该顶点)发生变化的顶点的出边进行松弛操作即可。
测试程序
#include<stdio.h>
#include<string.h>
#include<iostream>
using namespace std;
int u[100],v[100],w[100];
int dis[100];
int book[100];
int que[100];
int head,tail;
int first[100],next[100];
int flag;
int main()
{
int n,m;
scanf("%d %d",&n,&m);
for(int i=1; i<=m; i++)
{
scanf("%d %d %d",&u[i],&v[i],&w[i]);
first[i]=-1;
next[i]=-1;
}
for(int i=1; i<=m; i++)
{
if(first[u[i]]==-1)
{
first[u[i]]=i;
}
else
{
next[i]=first[u[i]];
first[u[i]]=i;
}
}
for(int i=1; i<=m; i++)
{
if(i==1)
dis[i]=0;
else
dis[i]=99999999;
}
int sum=0;
int t;
que[tail++]=first[1];
while(head<tail)
{
t=que[head];
while(t!=-1)
{
if(dis[v[t]]>dis[u[t]]+w[t])
{
if(book[v[t]]==0)
{
que[tail++]=first[v[t]];
}
dis[v[t]]=dis[u[t]]+w[t];
}
t=next[t];
}
head++;
int temp=head;
for(temp; temp<tail; temp++)
{
book[que[temp]]=1;
cout<<que[temp]<<endl;
}
}
for(int i=1; i<=n; i++)
{
cout<<dis[i]<<" ";
}
}测试结果:

空间复杂度:O(M)
时间复杂度:<O(NM)
和边关系密切,在顶点数量一定的情况下,边越少越划算,适用于稀疏图。
负权边可以正常求得最短路径,负权回路甚至可以检测出来(我目前还没想法可以检测出来负权回路)。
用来解决单源最短路问题。
附:上面我写的程序当存在负权边时可以求出最短路径,负权回路就不行了。所以算法和解决的问题其实没有什么关系,和以什么想法编程有关系。
存在负权边时:
存在负权回路时: