来自Transformer的降维打击!北京大学等最新发布论文,联合提出图像处理Transformer。通过对low-level计算机视觉任务,如降噪、超分、去雨等进行研究,提出了一种新的预训练模型IPT,占领low-level多个任务的榜首。
本文首发自极市平台,作者@Happy,转载需获授权。
paper: https://arxiv.org/abs/2012.00364
该文是清华大学&华为诺亚等联合提出的一种图像处理transformer。Transformer自提出之日起即引起极大的轰动,BERT、GPT-3等模型迅速占用NLP各大榜单;后来Transformer被用于图像分类中同样引起了轰动;再后来,transformer在目标检测任务中同样引起了轰动。现在Transformer再出手,占领了low-level多个任务的榜首,甚至它在去雨任务上以1.6dB超越了已有最佳方案。
Abstract
随机硬件水平的提升,在大数据集上预训练的深度学习模型(比如BERT,GPT-3)表现出了优于传统方法的有效性。transformer的巨大进展主要源自其强大的特征表达能力与各式各样的架构。
在这篇论文中,作者对low-level计算机视觉任务(比如降噪、超分、去雨)进行了研究并提出了一种新的预训练模型:IPT(image processing transformer)。为最大挖掘transformer的能力,作者采用知名的ImageNet制作了大量的退化图像数据对,然后采用这些训练数据对对所提IPT(它具有多头、多尾以适配多种退化降质模型)模型进行训练。此外,作者还引入了对比学习以更好的适配不同的图像处理任务。经过微调后,预训练模型可以有效的应用不到的任务中。仅仅需要一个预训练模型,IPT即可在多个low-level基准上取得优于SOTA方案的性能。
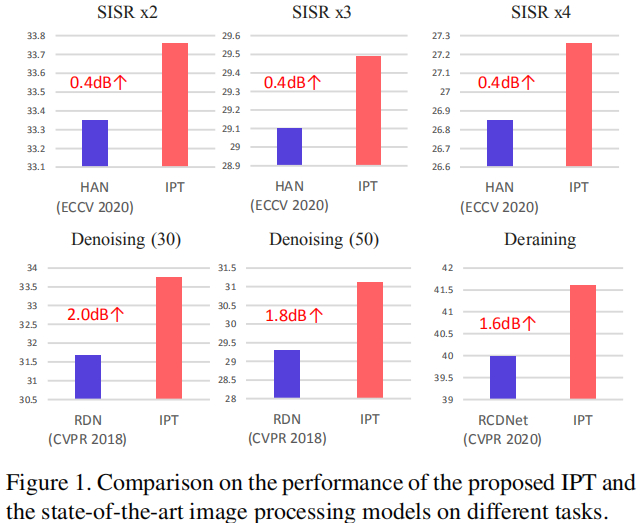
上图给出了所提方案IPT与HAN、RDN、RCDNet在超分、降噪、去雨任务上的性能对比,IPT均取得了0.4-2.0dB不等的性能提升。
Method
为更好的挖掘transformer的潜力以获取在图像处理任务上的更好结果,作者提出了一种ImageNet数据集上预训练的图像处理transformer,即IPT。
IPT architecture
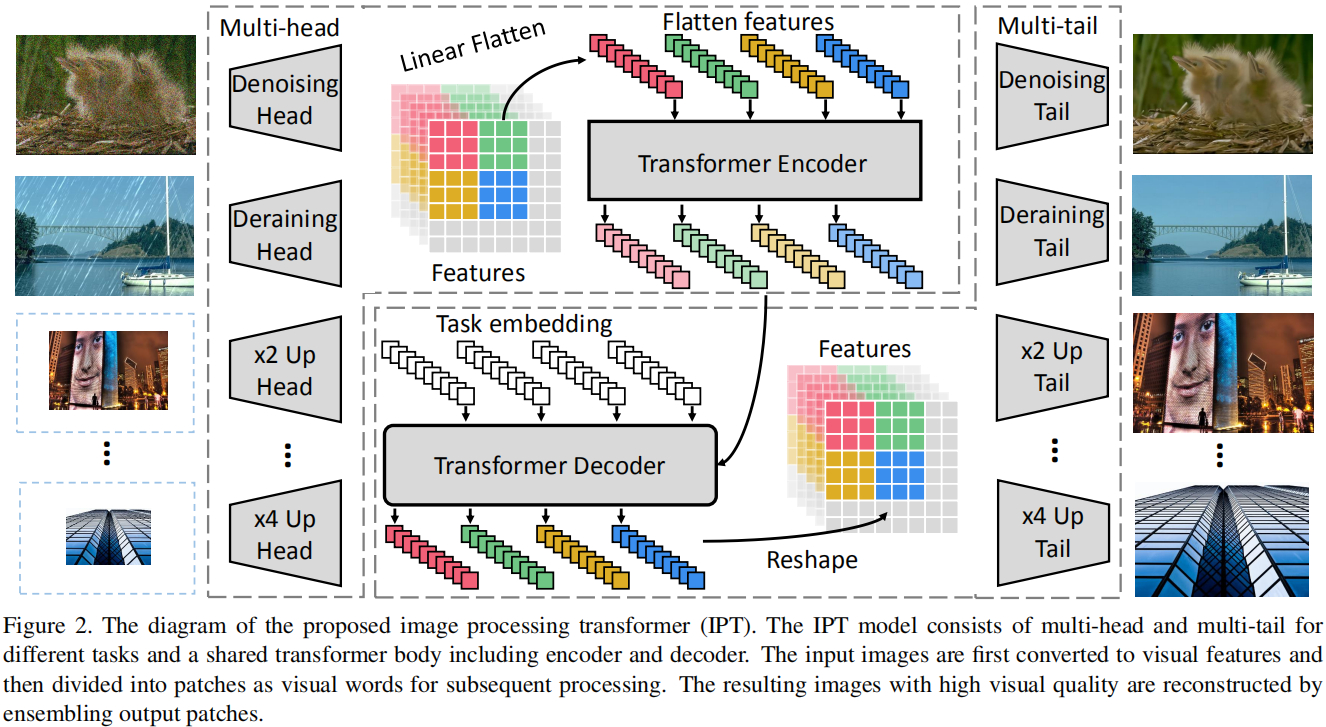
上图给出了IPT的整体架构示意图,可以看到它包含四个成分:
- 用于从输入退化图像提取特征的Heads;
- encoder与decoder模块用于重建输入数据中的丢失信息;
- 用于输出图像重建的Tails。
Heads
为适配不同的图像处理任务,作者提出采用多头(multi-head每个头包含三个卷积层)架构以分别处理不同的任务。假设输入图像表示为 x ∈ R 3 × H × W x \in R^{3\times H \times W} x∈R3×H×W,每个头可以生成特征 f H ∈ R C × H × W f_{H} \in R^{C \times H \times W} fH∈RC×H×W(注:C默认64)。故多头架构的计算过程可以描述为:
f H = H i ( x ) , i = ( 1 , ⋯ , N t ) f_H = H^i(x), i=(1,\cdots,N_t) fH=Hi(x),i=(1,⋯,Nt)
其中 N t N_t Nt表示图像处理任务个数。
Transformer encoder
在将前述特征送入到transformer之前,需要将输入特征拆分成块,每个块称之为“word”。具体来讲,输入特征 f H ∈ R C × H × W f_{H} \in R^{C \times H \times W} fH∈RC×H×W将被拆分为一系列块 f p i ∈ R p 2 × C , i = { 1 , ⋯ , N } f_{p_i} \in R^{p^2 \times C}, i=\{1, \cdots, N\} fpi∈Rp2×C,i={ 1,⋯,N},其中 N = H W P 2 N=\frac{HW}{P^2} N=P2HW表示特征块的数量,P表示特征块尺寸。
为编码每个块的位置信息,作者还在encoder里面添加了可学习的位置编码信息 E p i ∈ R P 2 × C E_{p_i} \in R^{P^2 \times C} Epi∈RP2×C。这里的encoder延续了原始transformer,采用了多头自注意力模块和前向网络。
encoder的输出表示为 f E i ∈ R P 2 × C f_{E_i} \in R^{P^2 \times C} fEi∈RP2×C,它与输入块尺寸相同,encoder的计算过程描述如下:
y 0 = [ E p 1 + f p 1 , E p 2 + f p 2 , ⋯ , E p N + f p N ] y_0 = [E_{p_1} + f_{p_1}, E_{p_2} + f_{p_2}, \cdots, E_{p_N} + f_{p_N}] y0=[Ep1+fp1,Ep2+fp2,⋯,EpN+fpN]
q i = k i = v i = L N ( y i − 1 ) q_i = k_i = v_i = LN(y_{i-1}) qi=ki=vi=LN(yi−1)
y i ′ = M S A ( q i , k i , v i ) + y i − 1 y_i^{'} = MSA(q_i, k_i, v_i) + y_{i-1} yi′=MSA(qi,ki,vi)+yi−1
y i = F F N ( L N ( y i ′ ) ) + y i ′ , i = 1 , ⋯ , l y_i = FFN(LN(y_i^{'})) + y_i^{'} , i = 1, \cdots, l yi=FFN(LN(yi′))+yi′,i=1,⋯,l
[ f E 1 , f E 2 , ⋯ , f E N ] = y l , [f_{E_1}, f_{E_2}, \cdots, f_{E_N}] = y_l, [fE1,fE2,⋯,fEN]=yl,
其中 l l l表示encoder的层数,MSA表示多头自注意力模块,FFN表示前馈前向网络(它仅包含两个全连接层)。
Transformer decoder
decoder采用了与encoder类似的架构并以encoder的输出作为输入,它包含两个MSA与1个FFN。它与原始transformer的不同之处在于:采用任务相关的embedding作为额外的输入,这些任务相关的embedding E t i ∈ R P 2 × C , i = { 1 , ⋯ , N t } E_t^i \in R^{P^2 \times C},i=\{1, \cdots, N_t\} Eti∈RP2×C,i={ 1,⋯,Nt}用于对不同任务进行特征编码。decoder的计算过程描述如下:
z 0 = [ f E 1 , f E 2 , ⋯ , f E N ] z_0 = [f_{E_1}, f_{E_2}, \cdots, f_{E_N}] z0=[fE1,fE2,⋯,fEN]
q i = k i = L N ( z i − 1 ) + E t , v i = L N ( z i − 1 ) q_i = k_i = LN(z_{i-1}) + E_t, v_i = LN(z_{i-1}) qi=ki=LN(zi−1)+Et,vi=LN(zi−1)
z i ′ = M S A ( q i , k i , v i ) + z i − 1 z_i^{'} = MSA(q_i,k_i, v_i) + z_{i-1} zi′=MSA(qi,ki,vi)+zi−1
q i ′ = L N ( z i ′ ) + E t , k i ′ = v i ′ = L N ( z 0 ) q_i^{'} = LN(z_i^{'}) + E_t, k_i^{'} = v_i^{'} = LN(z_0) qi′=LN(zi′)+Et,ki′=vi′=LN(z0)
z i ′ ′ = M S A ( q i ′ , k i ′ , v i ′ ) + z i ′ z_i^{''} = MSA(q_i^{'}, k_i^{'}, v_i^{'}) + z_i^{'} zi′′=MSA(qi′,ki′,vi′)+zi′
z i = F F N ( L N R ( z i ′ ′ ) ) + z i ′ ′ , i = 1 , ⋯ , l z_i = FFN(LNR(z_i^{''})) + z_i^{''}, i=1,\cdots,l zi=FFN(LNR(zi′′))+zi′′,i=1,⋯,l
[ f D 1 , f D 2 , ⋯ , f D N ] = z l [f_{D_1}, f_{D_2}, \cdots, f_{D_N}] = z_l [fD1,fD2,⋯,fDN]=zl
其中 f D i ∈ R P 2 × C f_{D_i} \in R^{P^2 \times C} fDi∈RP2×C表示decoder的输出。decoder输出的N个尺寸为 P 2 × C P^2 \times C P2×C的块特征将组成特征 f D ∈ R C × H × W f_D \in R^{C\times H \times W} fD∈RC×H×W。
Tails 这里的Tails属性与Head相同,作者同样采用多尾以适配不同的人物,其计算过程可以描述如下:
f T = T i ( f D ) , i = { 1 , ⋯ , N t } f_T = T^i(f_{D}) , i=\{1, \cdots, N_t\} fT=Ti(fD),i={
1,⋯,Nt}
最终的输出 f T f_T fT即为重建图像,其尺寸为 3 × H ′ × W ′ 3\times H^{'} \times W^{'} 3×H′×W′。输出图像的尺寸受任务决定,比如x2超分而言, H ′ = 2 H , W ′ = 2 W H^{'} = 2H, W^{'} = 2W H′=2H,W′=2W。
Pre-training on ImageNet
除了transformer的自身架构外,成功训练一个优化transformer模型的关键因素为:大数据集。而图像处理任务中常用数据集均比较小,比如图像超分常用数据DIV2K仅仅有800张。针对该问题,作者提出对知名的ImageNet进行退化处理并用于训练所提IPT模型。
这里的退化数据制作采用了与图像处理任务中相同的方案,比如超分任务中的bicubic下采样,降噪任务中的高斯噪声。图像的退化过程可以描述如下:
I c o r r u p t e d = f ( I c l e a n ) I_{corrupted} = f(I_{clean}) Icorrupted=f(Iclean)
其中f表示退化变换函数,它与任务相关。对于超分任务而言, f s r f_{sr} fsr表示bicubic下采样;对于降噪任务而言, f n o i s e ( I ) = I + η f_{noise}(I) = I + \eta fnoise(I)=I+η。IPT训练过程中的监督损失采用了常规的 L 1 L_1 L1损失,描述如下:
L s u p e r v i s e d = ∑ i = 1 N t L 1 ( I P T ( I c o r r u p t e d i ) , I c l e a n ) \mathcal{L}_{supervised} = \sum_{i=1}^{N_t} L_1(IPT(I_{corrupted}^i), I_{clean}) Lsupervised=i=1∑NtL1(IPT(Icorruptedi),Iclean)
上式同样表明:所提方案IPT同时对多个图像处理任务进行训练。也就说,对于每个batch,随机从多个任务中选择一个进行训练,每个特定任务对应特定的head和tail。在完成IPT预训练后,我们就可以将其用于特定任务的微调,此时可以移除掉任务无关的head和tail以节省计算量和参数量。
除了上述监督学习方式外,作者还引入了对比学习以学习更通用特征以使预训练IPT可以应用到未知任务。对于给定输入 x j x_j xj(随机从每个batch中挑选),其decoder输出块特征描述为 f D i j ∈ R P 2 × C , i = { 1 , ⋯ , N } f_{D_i}^j \in R^{P^2 \times C, i=\{1, \cdots, N\}} fDij∈RP2×C,i={ 1,⋯,N}。作者期望通过对比学习最小化同一图像内的块特征距离,最大化不同图像的块特征距离,这里采用的对比学习损失函数定义如下:
l ( f D i 1 j , f D i 2 j ) = − l o g e x p ( d ( f D i 1 j , f D i 2 j ) ) ∑ k = 1 B I k ≠ j e x p ( d ( f D i 1 j , f D i 2 j ) ) l(f_{D_{i_1}}^j, f_{D_{i_2}}^j) = -log \frac{exp(d(f_{D_{i_1}}^j, f_{D_{i_2}}^j))}{\sum_{k=1}^B \mathbb{I}_{k\ne j} exp(d(f_{D_{i_1}}^j, f_{D_{i_2}}^j))} l(fDi1j,fDi2j)=−log∑k=1BIk=jexp(d(fDi1j,fDi2j))exp(d(fDi1j,fDi2j))
L c o n s t r a s t i v e = 1 B N 2 ∑ i 1 = 1 N ∑ i 2 = 1 N ∑ j = 1 B l ( f D i 1 j , f D i 2 j ) \mathcal{L}_{constrastive} = \frac{1}{BN^2} \sum_{i_1=1}^N \sum_{i_2=1}^N \sum_{j=1}^B l(f_{D_{i_1}}^j, f_{D_{i_2}}^j) Lconstrastive=BN21i1=1∑Ni2=1∑Nj=1∑Bl(fDi1j,fDi2j)
其中 d ( a , b ) = a T b ∥ a ∥ ∥ b ∥ d(a,b) = \frac{a^Tb}{\|a\| \|b\|} d(a,b)=∥a∥∥b∥aTb表示cosine相似性。为更充分的利用监督与自监督信息,作者定义了如下整体损失:
L I P T = λ ⋅ L c o n s t r a s t i v e + L s u p e r v i s e d \mathcal{L}_{IPT} = \lambda \cdot \mathcal{L}_{constrastive} + \mathcal{L}_{supervised} LIPT=λ⋅Lconstrastive+Lsupervised
Experiments
Datasets
作者采用ImageNet数据制作训练数据,输入图像块大小为 48 × 48 48 \times 48 48×48,大约得到了10M图像数据。采用了6中退化类型:x2、x3、x4、noise-30、noise-50以及去雨。
Training&Fine-tuning
作者采用32个NVIDIA Tesla V100显卡进行IPT训练,优化器为Adam,训练了300epoch,初始学习率为 5 e − 5 5e^{-5} 5e−5,经200epoch后衰减为 2 e − 5 2e^{-5} 2e−5,batch=256。在完成IPT预训练后,对特定任务上再进行30epoch微调,此时学习率为 2 e − 5 2e^{-5} 2e−5。
Super-resolution
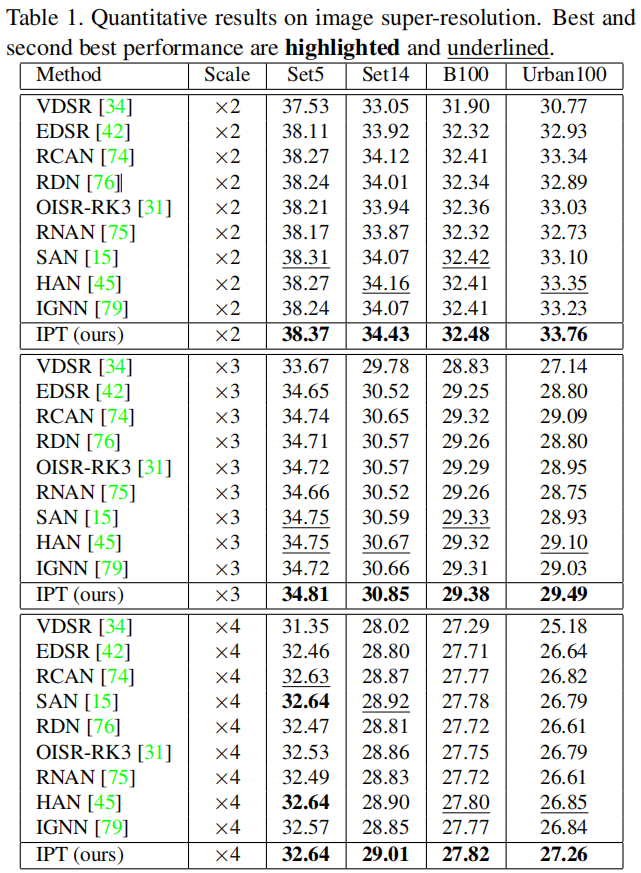
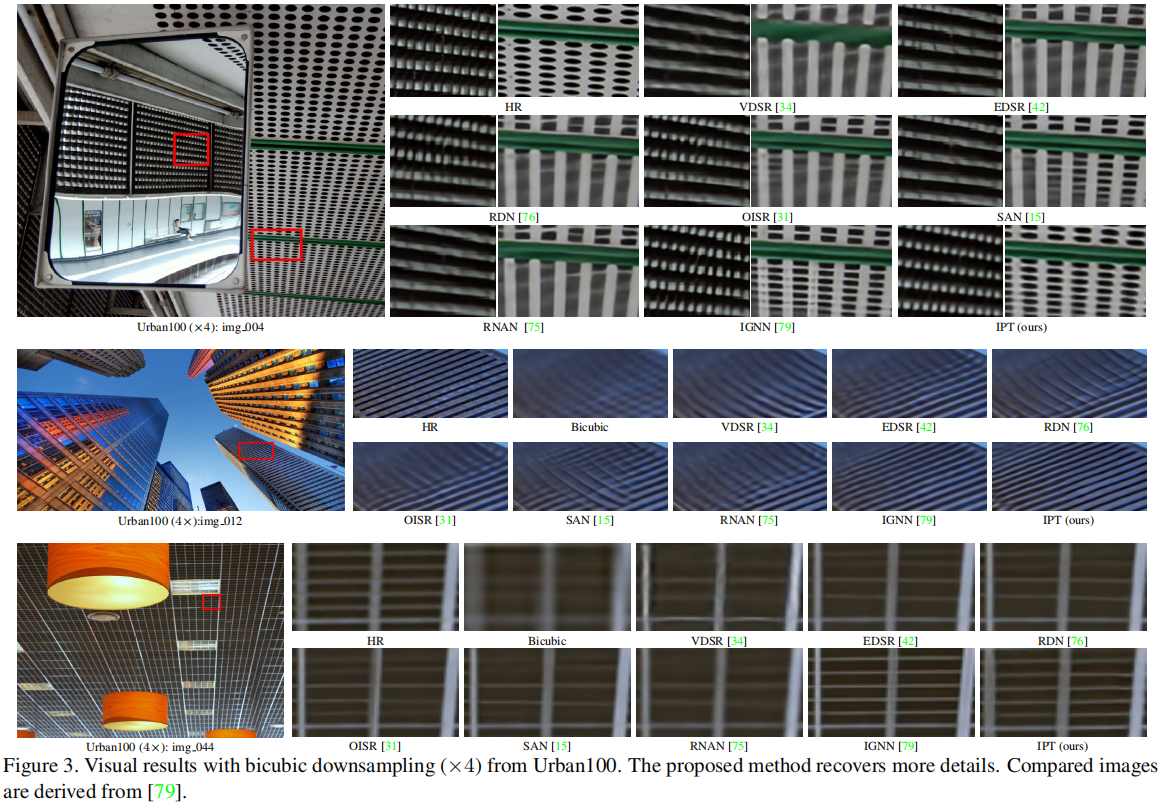
下表&下图给出了超分方案在图像超分任务上的性能与视觉效果对比。可以看到:
- IPT取得了优于其他SOTA超分方案的效果,甚至在Urban100数据集上以0.4dB优于其他超分方案;
- IPT可以更好重建图像的纹理和结构信息,而其他方法则会导致模糊现象。
Denoising
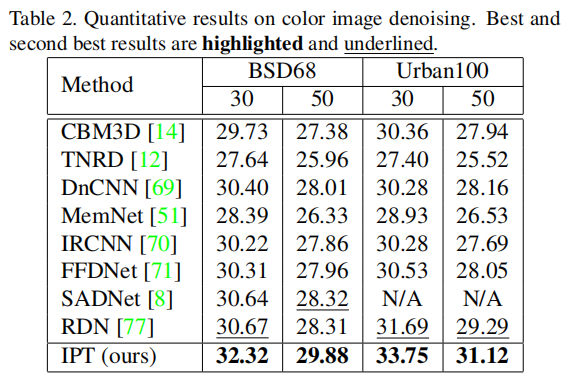
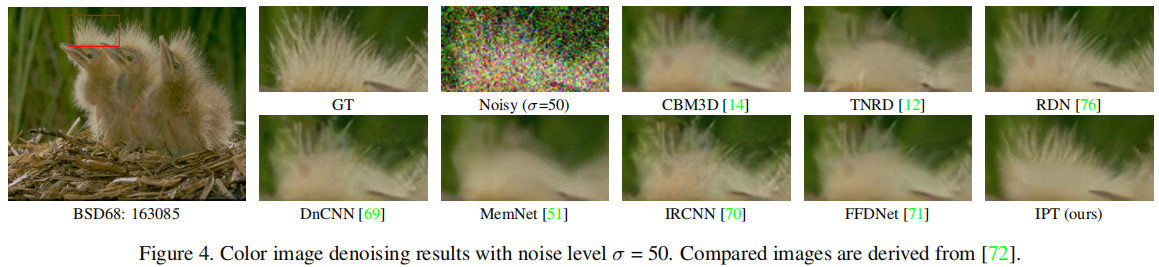
下表&下图给出了所提方法在降噪任务上的性能与视觉效果对比,可以看到:
- 在不同的噪声水平下,IPT均取得了最佳的降噪指标,甚至在Urban100数据上提升高达2dB。
- IPT可以很好的重建图像的纹理&结构信息,而其他降噪方法则难以重建细节信息。
Deraining
下表&下图给出了所提方法在图像去雨任务上的性能与视觉效果对比。可以看到:
- 所提方法取得了最好的指标,甚至取得了1.62dB的性能提升;
- IPT生成的图像具有与GT最详尽,且具有更好的视觉效果。


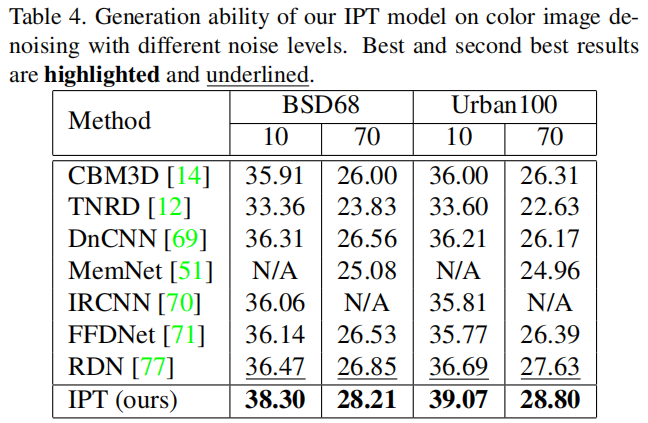
Generalization Ability
为说明所提方法的泛化性能,作者采用了未经训练的噪声水平进行验证,结果见下表。可以看到:尽管未在该其噪声水平数据上进行训练,所提IPT仍取得了最佳的指标。
Ablation Study
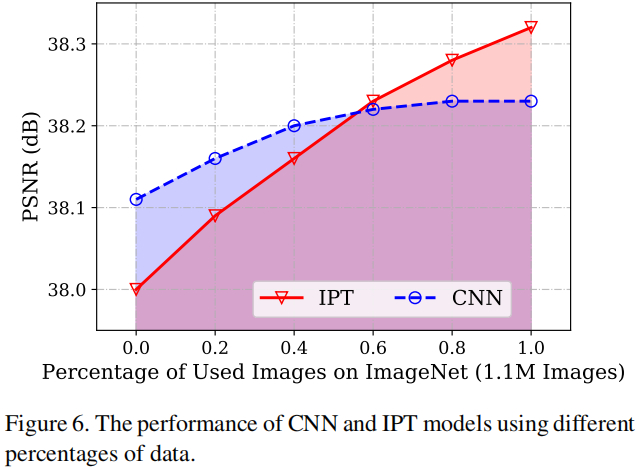
下图对比了IPT与EDSR在不同数量训练集上的性能对比,可以看到:当训练集数量较少时,EDSR具有更好的指标;而当数据集持续增大后,EDSR很快达到饱和,而IPT仍可持续提升并大幅超过了EDSR。
下表给出了对比损失对于模型性能影响性分析(x2超分任务)。当仅仅采用监督方式进行训练时,IPT的指标为38.27;而当引入对比学习机制后,其性能可以进一步提升0.1dB。这侧面印证了对比学习对于IPT预训练的有效性。

全文到此结束,对比感兴趣的同学建议查看原文。
作者介绍:Happy,一个爱“胡思乱想”的AI行者。欢迎大家联系极市小编(微信ID:fengcall19)加入极市原创作者行列