电拖开环/闭环V-M系统分析
--ujslili
1.直流电动机
首先直流电动机的调速是比较简单的。直流电动机主要就是电刷和换相片。
电刷就是固定在壳子上的,不动的;换相片有若干片,在转子上。
2.他励直流电动机的基本方程

根据转速表达式,很容易就可以得到调速的三种方式:
1.电枢回路串电阻
2.改变电枢电压
3.弱磁
然后就可以得到3组曲线:

然后电枢串电阻就是改变斜率的;调节电枢电压就是改变交点的;弱磁则都会改变。
3.所谓四象限运行
决定象现的因素就是转矩T与转速n的关系
1.n>0,T>0;正向电动
2.n>0,T<0;正转回馈制动
3.n<0,T<0;反向电动
4.n<0,T<0;反转回馈制动
然后T其实是跟电枢电流Ia的方向一致的。

4.开环V-M系统

4.1首先控制过程:
Uc变化,GT变化,VT的触发角变化,电枢电压变化,然后引起n的变化。
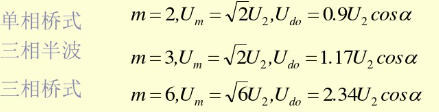
V的组成可以是,单相半波,三相半波,三相全波等等
如果说V是可控整流电路,也就是这种

值得注意的是,如果单组可控整流电路,电流方向一定。电流不允许反向,也就是只能1或14象现运行。
如果V是全控整流电路,也就是
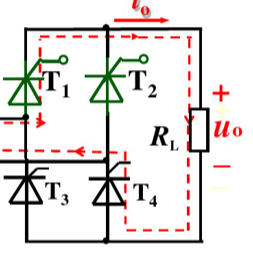
这个就可以实现有源逆变,也可以使得输出电压反向。如果要想电机四象限运行,可以用两组全控整流电路
4.2若V为三相半波
首先可以画出系统的等效图:

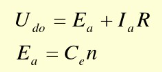
然后列出平衡方程:

4.3电流连续与断续
所谓电流的连续与断续其实就是决定于电路的电感大小和负载大小。
如果负载很小,也就意味着n很大,也就是说反电动势就比较大,由于我们是晶闸管整流电路,在ud0和Ea比较的时候,udo比Ea大的部分就减少,也就是说导通角会变小,此时若电感值不够大的话,电流就会断续。
4.4机械特性曲线
根据之前的公式(3),在触发角一定的时候,机械特性曲线应该是一条直线,**但是在电流断续的时候,只可以在很短的时间内用转矩的表达式,这个时候我们可以看等效电路图,空载相当于断路,随着负载的减轻,等效电阻R会越来越大,斜率也就越来越大。**所以画出的机械特性曲线为:

4.4开环调速

可以画出稳态
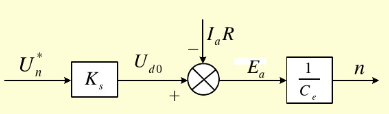
其实根据就是:
Ks其实是测出来的,在一定的范围内,输入电压和整流的电压是有线性关系的。
4.5指标
4.5.1静差率s:就是系统在某一转速下运行,系统从空载到额定负载时候的转速降/此时的空载转速

也就是只要在低转速下静差率满足要求,则在高转速下s也一定满足要求。
4.5.2调速范围D
就是额定负载下的最大转速/最小转速
5转速闭环V-M调速系统
优点:为了提高D、
缺点:对于转速给定环节及转速检测环节本身的误差,反馈调节无能无力

稳态流程图:

整理之后可以得到:

这个叫做有静差转速单闭环系统的静特性方程
所谓静特性方程就是转速与转矩(负载电流)的关系
为什么叫有静差?
从开环和闭环的表达式可以看出

然后相同情况下:

也就是说在单闭环下,转速降是缩小(K+1)倍的,但是是存在的,所以叫有静差。
6.晶闸管装置的动态传递函数
由于晶闸管整流装置的失控,所以说这是一个滞后环节

7.直流电动机的动态传递函数

于是得到直流电机的流程图:

8.整理得到单闭环V-M动态流程图:

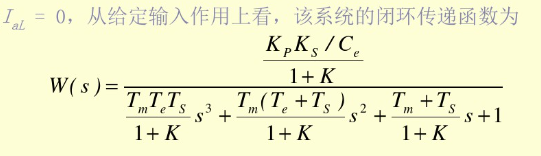
再根据劳斯判据找到稳定条件:

稳定条件

9.无静差的V-M——用的PI

稳态结构图:
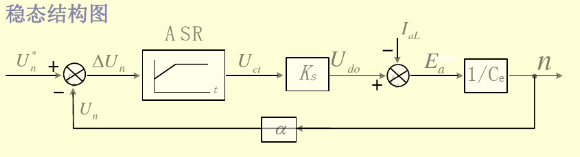
Uct是先比例,后积分,再饱和
动态结构图:
就是把电机和晶闸管的传递函数换掉了

10.1.突加负载的调节过程

首先TL1,Uct1的时候是稳定的,再t2突然加负载到TL2,电机肯定n下降,根据转速反馈,Uct上升,所以ud0上升,所以电枢电流肯定要增大,直到电枢电流等于负载电流等效值,也就是电磁转矩=负载转矩的意思,这个时候转速下降到最低,也就是t2点,但是由于积分环节的滞后作用,uct还是再变大,导致U0变大,电枢电流变大,所以电磁转矩变大,还大于负载转矩所以超调。然后转速的上升使得转速差变小,使得uct变小,直到0.
结论:
稳态时,电容相当于断路(直流),开环放大倍数很大,响应快
动态时,放大倍数不大保证稳定,积分环节消除误差。
10.双闭环V-M

电流无静差内环,转速无静差外环,也就是转速环提供电流环的基准值,依靠电流来控制n
值得注意的是,转速环和电流环都有饱和值,也就是说被限幅了,此时pi调节器就是一个中间环节,没有任何调节效果的。所以也对应了最大移相角,说白了就是触发角的最小值,触发角越小,平均整流电压越大嘛。
电流无静差内环:说白了也就是通过控制电流来控制转矩来控制转速。
10.1稳态分析,就是转速降为0
首先明确电流环是不能饱和的,如果你电流环饱和了,也就是说晶闸管的输出电压调不了了,这就失控了。所以在稳态下就只有转速环的饱和与不饱和

10.2动态分析——有转速变化

启动:
第一阶段:
Ud0有了,所以Ia有了,所以n开始变大,由于惯性的存在,一开始的转速差很大使得ASR饱和,就只能靠ACR强迫电枢电流升高到最大值,因为这时段反电动势比较小,所以产生电枢电流的电压就比较小,也就是触发角β还稍稍大于βmin。
第二阶段:
由于ASR饱和,所以在一定的转速差内,电枢电流都是Iam,所以是恒流启动,恒流就决定了恒定的电磁转矩,所以加速度恒定,随着转速的上升,Ea必然上升,所以此时的ACR时一直调节的
第三阶段:
转速达到给定值,但由于PI的积分环节滞后ASR输出负的偏差电压,通过ACR,使得电流下降。在一开始的时刻内由于现在是启动,负载转矩很小的,所以一开始虽然电流下降了,但还是加速,直到电磁转矩=负载转矩。
具体如下图所示:

如有不对,敬请指正