一、简介

EC200S-CN 是移远通信最近推出的 LTE Cat 1 无线通信模块,支持最大下行速率 10Mbps 和最大上行速率 5Mbps,具有超高的性价比;同时在封装上兼容移远通信多网络制式 LTE Standard EC2x(EC25、EC21、EC20 R2.0、EC20 R2.1)和 EC200T/EG25-G/EG21-G 模块以及 UMTS/HSPA+ UC20/UC200T 模块,实现了 3G 网络与 4G 网络之间的无缝切换。EC200S-CN 还支持标准的 Mini PCIe 封装,以满足不同行业产品应用需求。
Quectel EC2x 模块具有嵌入式 TCP/IP堆栈,使主机可以通过 AT 命令直接上网。可以实现TCP客户端、UDP客户端、TCP服务器和UDP服务器。
二、AT指令
2.1 AT
测试AT指令功能是否正常,等待模块返回 OK。
AT
OK
2.2 AT + CPIN?
查询 SIM 卡状态,返回 READY 则表示SIM卡正常,如果 20 秒后还无法识别 SIM 卡,重新启动模块。
AT+CPIN?
+CPIN: READY
OK
2.3 AT + CREG?
查询模组是否注册上GSM网络,如果 90秒后未能在 CS 上注册域名服务,重新启动模块。
如果返回 1 或 5 ,代表 CS 服务注册成功。
+CREG:0,1 表示已注册上本地网,+CREG:0,5表示注册上漫游网。
AT+CREG?
+CREG: 0,1
OK
2.4 AT + CGREG?
查询模组是否注册上GPRS网络,+CGREG:0,1 表示已注册上本地网,+CGREG:0,5表示注册上漫游网。
AT+CGREG?
+CGREG: 0,1
OK
2.5 AT + QICSGP=1,1,“CMNET”
该命令可用于配置,,等TCP / IP上下文参数。QoS设置可以由AT + CGQMIN,AT + CGEQMIN,AT + CGQREQ和AT + CGEQREQ配置 。
- AT+QICSGP=?:查询命令参数。
- AT+QICSGP=:查询 contextID的配置信息。
- AT+QICSGP=[,<context_type>,[,,)[,]]]:配置 contextID信息。
- :整数类型。上下文ID。范围是1-16。
- <context_type>:整数类型。协议类型。1(IPV4)、2(IPV4V6)。
- :字符串类型。接入点名称。移动CMNET,联通UNINET
- :字符串类型。用户名。
- :字符串类型。密码。
- :整数类型。身份验证方法。0(没有)、1(PAP)、2(CHAP)、3(PAP或CHAP)。
- 返回信息:OK 或 ERROR。
AT+QICSGP=1,1,\"CMNET\",\"\",\"\",1
OK
2.6 AT + QIDEACT=1
在激活GPRS场景之前先关闭GPRS场景,确保连接正确
AT+QIDEACT=1
OK
2.7 AT + QIACT=1
激活移动场景
AT+QIACT=1
OK
2.8 AT+QIOPEN
该命令用于打开套接字服务。
- AT+QIOPEN=?:查询命令参数。
- AT+QIOPEN=,,<service_type>,<IP_address>/<domain_name>,<remote_port>[,<local_po CONNECTrt>[,<access_mode>]] :打开 Socket 服务。
- :整数类型。上下文ID。范围是1-16。
- :整数类型。套接字服务索引。范围是0-11。
- <SERVICE_TYPE>:字符串类型。套接字服务类型。
- “ TCP ” :作为客户端启动TCP连接
- “ UDP ”:作为客户端启动UDP连接
- “TCP LISTENER” :启动TCP服务器以侦听TCP连接
- “UDP SERVICE” :启动UDP服务
- <IP_address>:字符串类型。
- 如果<service_type>是TCP或UDP ,则表示远程服务器的IP地址,例如 “220.180.239.212”。
- 如果<service_type>是TCP LISTENER或UDP SERVICE 地址,请输入“127.0.0.1”。
- <domain_name>:字符串类型。远程服务器的域名地址。
- <remote_port> :远程服务器的端口,仅在<service_type>为“TCP”或“UDP”时有效。范围是0-65535。
- <LOCAL_PORT> :本地端口。范围是0-65535。
- 如果<service_type>是“TCP LISTENER”或“UDP SERVICE”,则此参数必须指定。
- 如果<service_type>是“TCP”或“UDP”。如果<local_port>为0,那么本地端口将是自动分配。否则,将按指定分配本地端口。
- <access_mode> :整数类型。套接字服务的数据访问模式。
- 0: 缓冲区访问模式
- 1:直推模式
- 2:透明访问模式
- :整数类型。操作的错误代码。请参阅第4章。
AT+QIOPEN=1,0,\"TCP\",\"180.97.81.180\",53540,0,1
OK
+QIOPEN: 0,0
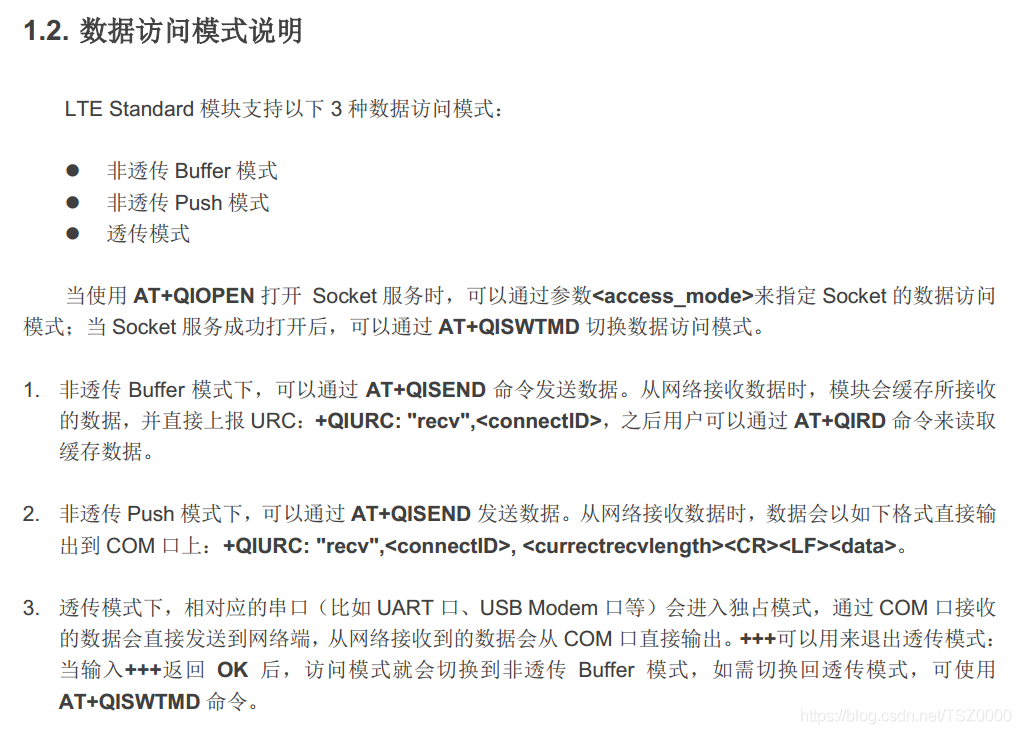
Buffer模式,Push模式,透传模式。通过参数<access_mode>进行配置。

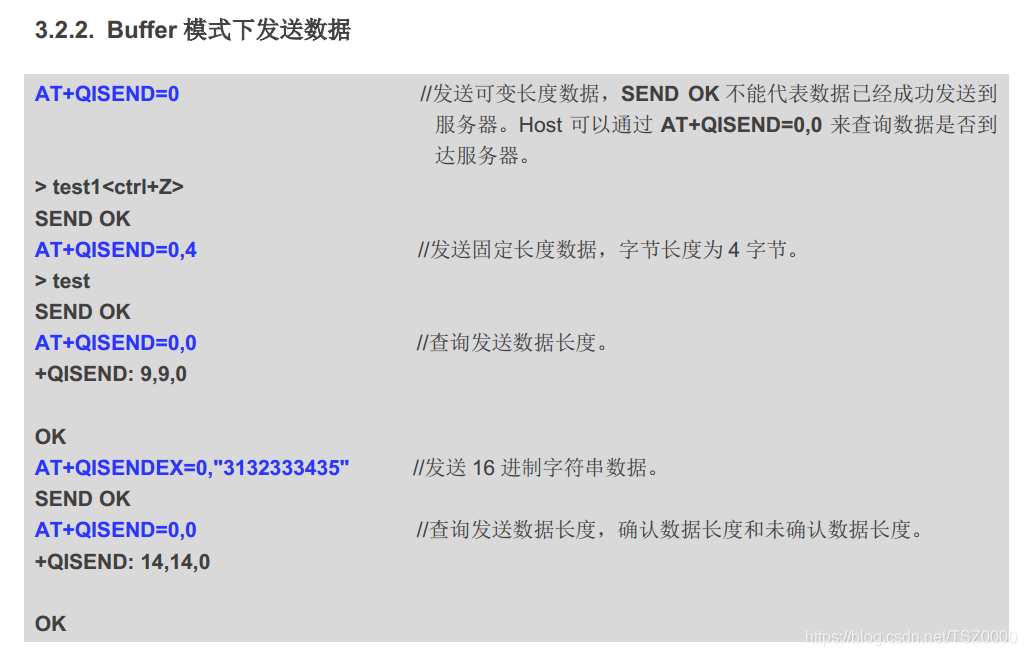
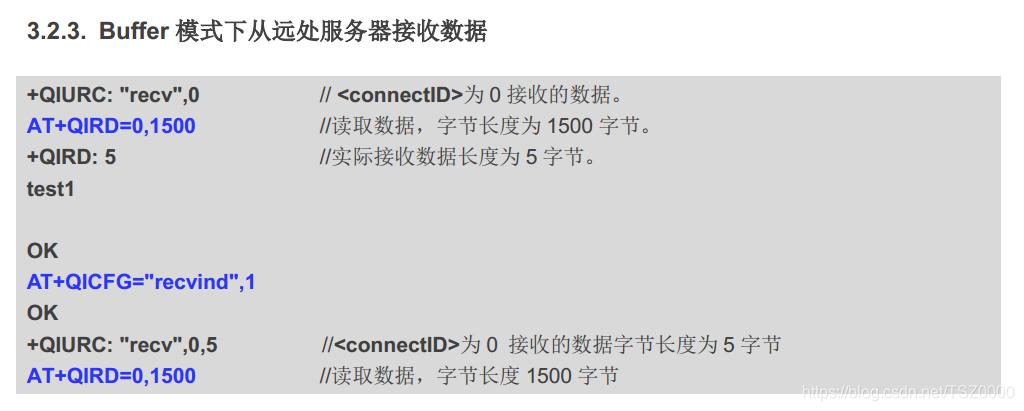
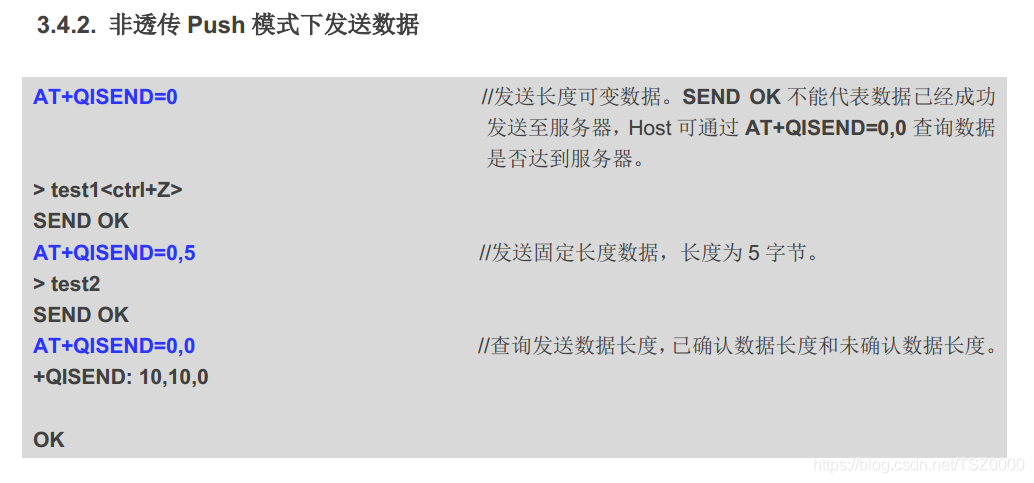
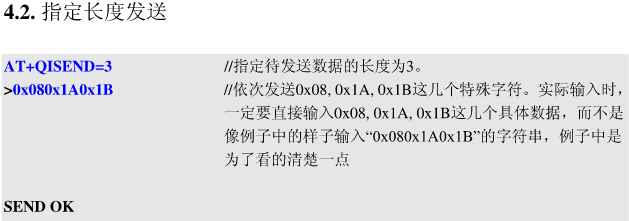
2.9 AT + QISEND
如果指定套接字服务的<access_mode>是缓冲区访问模式或直接推送模式,则数据可以是通过AT + QISEND发送。如果数据成功发送到模块,将返回“ SEND OK ” 。否则它将返回“ SEND FAIL ” 或“ ERROR ” 。“ SEND FAIL ” 表示发送缓冲区已满客户可以尝试重新发送数据。“ERROR”表示在发送过程中遇到错误 数据。客户应该延迟一段时间来发送数据。最大数据长度为1460字。“SEND OK”并不意味着数据已成功发送到服务器。客户可以查询数据是否通过AT + QISEND = ,0命令到达服务器。透传模式下不需要AT指令发送数据

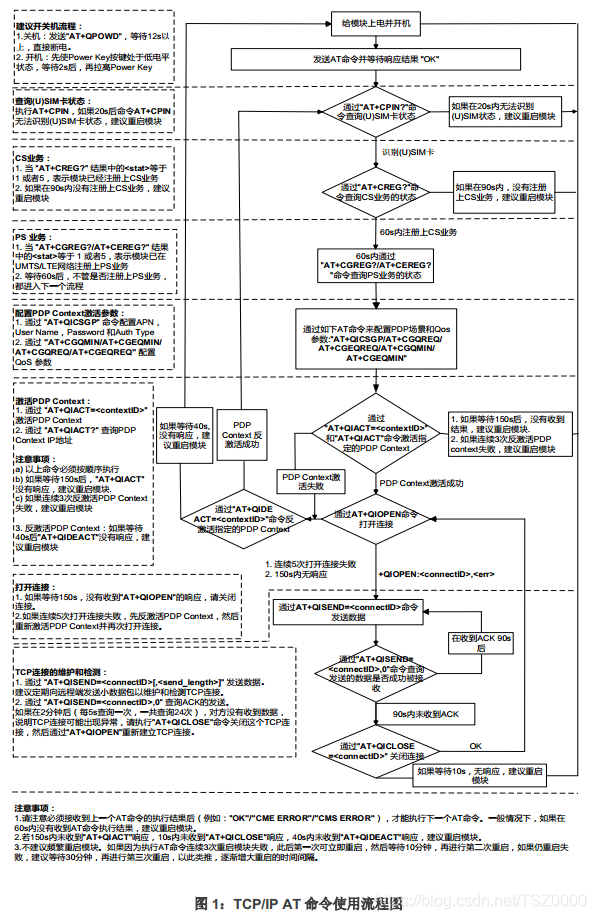
三、TCP/IP AT命令拨号流程
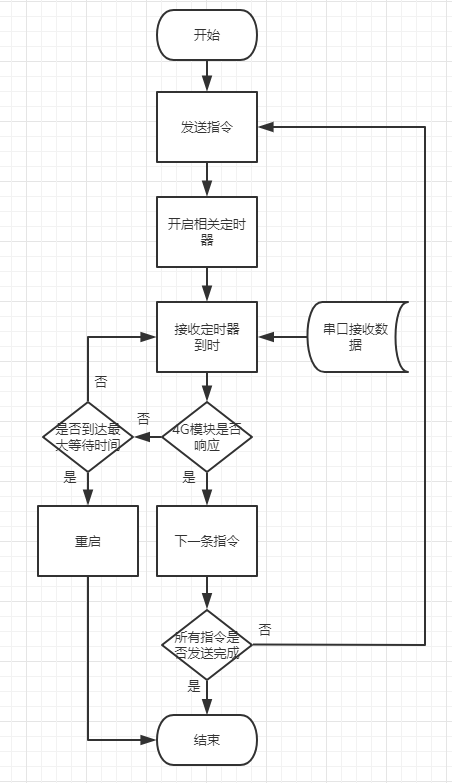
四、程序大致流程
主要开了三个定时器
sendCmdTimer:发送命令定时器
sendDataTimer:发送数据定时器(用于建立TCP连接后发送数据)
recvCmdTimer:统一接收命令定时器
五、移植文件
5.1 board_ec200s.c
/*********************************************************************
* INCLUDES
*/
#include "stdlib.h"
#include "string.h"
#include "app_timer.h"
#include "nrf_log.h"
#include "board_uart.h"
#include "board_ec200s.h"
#include "common.h"
static void clearBuffer(void);
static void reset(void);
static void timer_sendCmdCallback(void *arg);
static void timer_sendDataCallback(void *arg);
static void timer_recvCmdCallback(void *arg);
static void timer_resetCallback(void *arg);
static void sendData(char *pCmd);
/*********************************************************************
* GLOBAL VARIABLES
*/
char g_ec200sBuf[MAX_RECV_BUF_SIZE] = {
0}; // 接收缓存
uint32_t g_ec200sCnt = 0; // 接收计数
uint8_t g_isEc200sInit = 0;
/*********************************************************************
* LOCAL VARIABLES
*/
APP_TIMER_DEF(s_sendCmdTimer); // 发送命令的定时器
APP_TIMER_DEF(s_sendDataTimer); // 发送数据的定时器
APP_TIMER_DEF(s_recvCmdTimer); // 接收命令的定时器
APP_TIMER_DEF(s_resetTimer); // 重启的定时器
static uint8_t s_sendCmdResult = 0; // 发送命令结果
static uint32_t s_waitCmdTime = 0; // 等待命令时间
static uint8_t s_waitCmdNum = 0; // 等待命令次数
static bool s_sendCmdFlag = false;
static uint8_t s_sendCmdStep = 0;
static char s_waitCmdBuf[30] = {
0}; // 等待比较命令
static bool s_sendDataFlag = false;
static uint8_t s_sendDataStep = 0;
static char s_sendDataBuf[MAX_RECV_BUF_SIZE] = {
0};
static char s_recvDataBuf[MAX_RECV_BUF_SIZE] = {
0};
static uint32_t s_recvDataLen = 0;
static uint8_t s_isReset = 0;
/*********************************************************************
* PUBLIC FUNCTIONS
*/
/**
@brief 初始化
@param 无
@return 1 - 成功;0 - 失败
*/
uint8_t EC200S_Init(void)
{
if((s_sendCmdResult == 0) && (s_isReset == 0))
{
NRF_LOG_INFO("EC200S_Init");
s_sendCmdStep = 0;
StartSendCmdTimer();
StartRecvCmdTimer();
s_sendCmdResult = 2;
}
if(s_sendCmdResult == 1)
{
s_sendCmdResult = 0;
return 1;
}
return 0;
}
/**
@brief 引脚配置
@param 无
@return 无
*/
void EC200S_GpioConfig(void)
{
nrf_gpio_cfg_output(EC200S_GPIO_PIN);
nrf_gpio_pin_write(EC200S_GPIO_PIN, 1);
}
/**
@brief 发送数据到TCP服务器
@param pString -[in] 发送数据
@return 无
*/
void EC200S_Send(char *pString)
{
if(g_isEc200sInit == 1)
{
sprintf(s_sendDataBuf, "%s\x1A", pString);
s_sendDataStep = 0;
NRF_LOG_INFO("%s", pString);
StartSendDataTimer();
StartRecvCmdTimer();
}
}
/**
@brief 从TCP服务器接收数据
@param pRecvDataBuf -[out] 接收数据
@return 接收数据长度
*/
uint32_t EC200S_Receive(char *pRecvDataBuf)
{
uint32_t recvDataLen = 0;
if(s_recvDataLen > 0)
{
memcpy(pRecvDataBuf, s_recvDataBuf, s_recvDataLen);
recvDataLen = s_recvDataLen;
memset(s_recvDataBuf, 0, s_recvDataLen);
s_recvDataLen = 0;
}
return recvDataLen;
}
/**
@brief 创建发送命令的定时器
@param 无
@return 无
*/
void CreateSendCmdTimer(void)
{
app_timer_create(&s_sendCmdTimer, APP_TIMER_MODE_REPEATED, timer_sendCmdCallback);
}
/**
@brief 开启发送命令的定时器
@param 无
@return 无
*/
void StartSendCmdTimer(void)
{
app_timer_start(s_sendCmdTimer, SEND_CMD_PERIOD, NULL);
}
/**
@brief 关闭发送命令的定时器
@param 无
@return 无
*/
void StopSendCmdTimer(void)
{
app_timer_stop(s_sendCmdTimer);
}
/**
@brief 创建发送数据的定时器
@param 无
@return 无
*/
void CreateSendDataTimer(void)
{
app_timer_create(&s_sendDataTimer, APP_TIMER_MODE_REPEATED, timer_sendDataCallback);
}
/**
@brief 开启发送数据的定时器
@param 无
@return 无
*/
void StartSendDataTimer(void)
{
app_timer_start(s_sendDataTimer, SEND_DATA_PERIOD, NULL);
}
/**
@brief 关闭发送数据的定时器
@param 无
@return 无
*/
void StopSendDataTimer(void)
{
app_timer_stop(s_sendDataTimer);
}
/**
@brief 创建接收命令的定时器
@param 无
@return 无
*/
void CreateRecvCmdTimer(void)
{
app_timer_create(&s_recvCmdTimer, APP_TIMER_MODE_REPEATED, timer_recvCmdCallback);
}
/**
@brief 开启接收命令的定时器
@param 无
@return 无
*/
void StartRecvCmdTimer(void)
{
app_timer_start(s_recvCmdTimer, RECV_CMD_PERIOD, NULL);
}
/**
@brief 关闭接收命令的定时器
@param 无
@return 无
*/
void StopRecvCmdTimer(void)
{
app_timer_stop(s_recvCmdTimer);
}
/**
@brief 创建重启的定时器
@param 无
@return 无
*/
void CreateResetTimer(void)
{
app_timer_create(&s_resetTimer, APP_TIMER_MODE_SINGLE_SHOT, timer_resetCallback);
}
/**
@brief 处理接收命令
@param 无
@return 1 - 成功;0 - 失败
*/
uint8_t ReceiveCommandHandler(void)
{
if(strstr((const char *)g_ec200sBuf, "SEND OK") != NULL) // 如果检索到关键词SEND OK
{
s_sendDataStep++;
s_sendDataFlag = false;
clearBuffer();
return 1;
}
else if(strstr((const char *)g_ec200sBuf, "+QISEND:") != NULL) // 如果检索到关键词+QISEND:
{
s_sendDataStep++;
s_sendDataFlag = false;
clearBuffer();
return 1;
}
else if(strstr((const char *)g_ec200sBuf, "+CPIN: READY") != NULL) // 如果检索到关键词+CPIN: READY
{
s_sendCmdStep++;
s_sendCmdFlag = false;
clearBuffer();
return 1;
}
else if(strstr((const char *)g_ec200sBuf, "+CREG: 0,1") != NULL) // 如果检索到关键词+CREG: 0,1
{
s_sendCmdStep++;
s_sendCmdFlag = false;
clearBuffer();
return 1;
}
else if(strstr((const char *)g_ec200sBuf, "+CGREG: 0,1") != NULL) // 如果检索到关键词+CGREG: 0,1
{
s_sendCmdStep++;
s_sendCmdFlag = false;
clearBuffer();
return 1;
}
else if(strstr((const char *)g_ec200sBuf, "OK") != NULL) // 如果检索到关键词OK
{
s_sendDataStep++;
s_sendDataFlag = false;
s_sendCmdStep++;
s_sendCmdFlag = false;
clearBuffer();
return 1;
}
else if(strstr((const char *)g_ec200sBuf, "+QIOPEN:") != NULL) // 如果检索到关键词+QIOPEN:
{
NRF_LOG_INFO("Connect Success");
s_sendCmdResult = 1;
s_sendCmdStep++;
s_sendCmdFlag = false;
clearBuffer();
StopSendCmdTimer();
StopRecvCmdTimer();
return 1;
}
else if(strstr((const char *)g_ec200sBuf, "ERROR") != NULL) // 如果检索到关键词ERROR
{
NRF_LOG_INFO("connect error\n");
reset();
clearBuffer();
return 1;
}
else if(strstr((const char *)g_ec200sBuf, "POWERED DOWN") != NULL) // 如果检索到关键词POWERED DOWN
{
NRF_LOG_INFO("power down\n");
}
return 0;
}
/**
@brief 处理接收数据
@param 无
@return 1 - 成功;0 - 失败
*/
uint8_t ReceiveDataHandler(void)
{
static bool s_isRecvData;
if(strstr((const char *)g_ec200sBuf, "+QIURC: \"recv\",0,") != NULL) // 如果检索到关键词+QIURC: \"recv\",0,
{
s_isRecvData = true;
clearBuffer();
return 1;
}
if(s_isRecvData)
{
memcpy(s_recvDataBuf, g_ec200sBuf, g_ec200sCnt);
s_recvDataLen = g_ec200sCnt;
clearBuffer();
s_isRecvData = false;
return 1;
}
return 0;
}
/*********************************************************************
* LOCAL FUNCTIONS
*/
/**
@brief 清空缓存
@param 无
@return 无
*/
static void clearBuffer(void)
{
memset(g_ec200sBuf, 0, sizeof(g_ec200sBuf));
memset(s_waitCmdBuf, 0, sizeof(s_waitCmdBuf));
g_ec200sCnt = 0;
}
/**
@brief 重启模块
@param 无
@return 无
*/
static void reset(void)
{
NRF_LOG_INFO("reset\n");
s_isReset = 1;
g_isEc200sInit = 0;
s_sendCmdResult = 0;
s_sendCmdFlag = false;
s_sendDataFlag = false;
StopSendCmdTimer();
StopSendDataTimer();
StopRecvCmdTimer();
nrf_gpio_pin_write(EC200S_GPIO_PIN, 0); // 拉低
app_timer_start(s_resetTimer, RESET_PERIOD, NULL); // 等待2s,再拉高
}
/**
@brief 发送命令定时器的回调函数
@param 无
@return 无
*/
static void timer_sendCmdCallback(void *arg)
{
if(s_sendCmdStep == 0 && s_sendCmdFlag == false) // 测试AT指令功能是否正常
{
sendData("AT\r\n");
s_waitCmdTime = 10 * 10; // 10秒
s_sendCmdFlag = true;
}
else if(s_sendCmdStep == 1 && s_sendCmdFlag == false) // 查询SIM卡是否正常,返回ready则表示SIM卡正常
{
sendData("AT+CPIN?\r\n");
s_waitCmdTime = 20 * 10; // 20秒
s_sendCmdFlag = true;
}
else if(s_sendCmdStep == 3 && s_sendCmdFlag == false) // 查询模组是否注册上GSM网络
{
sendData("AT+CREG?\r\n");
s_waitCmdTime = 90 * 10; // 90秒
s_sendCmdFlag = true;
}
else if(s_sendCmdStep == 5 && s_sendCmdFlag == false) // 查询模组是否注册上GPRS网络
{
sendData("AT+CGREG?\r\n");
s_waitCmdTime = 60 * 10; // 60秒
s_sendCmdFlag = true;
}
else if(s_sendCmdStep == 7 && s_sendCmdFlag == false) // 配置PDP场景
{
sendData("AT+QICSGP=1,1,\"CMNET\",\"\",\"\",1\r\n");
s_waitCmdTime = 40 * 10; // 40秒
s_sendCmdFlag = true;
}
else if(s_sendCmdStep == 8 && s_sendCmdFlag == false) // 在激活GPRS场景之前先关闭GPRS场景,确保连接正确
{
sendData("AT+QIDEACT=1\r\n");
s_waitCmdTime = 40 * 10; // 40秒
s_sendCmdFlag = true;
}
else if(s_sendCmdStep == 9 && s_sendCmdFlag == false) // 在激活GPRS场景之前先关闭GPRS场景,确保连接正确
{
sendData("AT+QIACT=1\r\n");
s_waitCmdTime = 150 * 10; // 150秒
s_sendCmdFlag = true;
}
else if(s_sendCmdStep == 10 && s_sendCmdFlag == false) // 连接服务器
{
sendData("AT+QIOPEN=1,0,\"TCP\",\"180.97.81.180\",59889,0,1\r\n");
s_waitCmdTime = 150 * 10; // 150秒
s_sendCmdFlag = true;
}
if(s_waitCmdTime == 0) // 没有响应重启模块
{
reset();
}
}
/**
@brief 发送数据定时器的回调函数
@param 无
@return 无
*/
static void timer_sendDataCallback(void *arg)
{
if(s_sendDataStep == 0) // 发送长度可变数据格式
{
sendData("AT+QISEND=0\r\n"); // >会被断包,这里特殊处理
s_waitCmdTime = 60 * 10; // 60秒
s_sendDataStep++;
}
else if(s_sendDataStep == 1 && s_sendDataFlag == false) // 发送实际数据
{
sendData(s_sendDataBuf);
memset(s_sendDataBuf, 0, MAX_RECV_BUF_SIZE);
s_waitCmdTime = 60 * 10; // 60秒
s_sendDataFlag = true;
}
else if(s_sendDataStep == 2 && s_sendDataFlag == false) // 查询数据是否达到服务器
{
sendData("AT+QISEND=0,0\r\n");
s_waitCmdTime = 5 * 10; // 5秒
s_waitCmdNum = 23;
s_sendDataFlag = true;
}
else if(s_sendDataStep == 4) // 完成发送
{
StopSendDataTimer();
StopRecvCmdTimer();
}
if(s_waitCmdTime == 0) // 等待60秒,没有响应重启模块
{
s_waitCmdNum--;
if(s_waitCmdNum > 0) // 2分钟后(每5秒查询一次,共24次),没有响应重启模块
{
sendData("AT+QISEND=0,0\r\n");
s_waitCmdTime = 5 * 10;
s_sendDataStep = 2;
s_sendDataFlag = true;
return;
}
reset();
}
}
/**
@brief 接收命令定时器的回调函数
@param 无
@return 无
*/
static void timer_recvCmdCallback(void *arg)
{
if(s_waitCmdTime == 0)
{
StopRecvCmdTimer();
return;
}
s_waitCmdTime--;
}
/**
@brief 重启定时器的回调函数
@param 无
@return 无
*/
static void timer_resetCallback(void *arg)
{
nrf_gpio_pin_write(EC200S_GPIO_PIN, 1);
s_isReset = 0;
}
/**
@brief 发送数据
@param pCmd -[in] 命令字符串
@return 无
*/
static void sendData(char *pCmd)
{
UART_WriteData((uint8_t *)pCmd, strlen(pCmd));
}
5.2 board_ec200s.h
#ifndef _BOARD_EC200S_H_
#define _BOARD_EC200S_H_
/*********************************************************************
* INCLUDES
*/
/*********************************************************************
* DEFINITIONS
*/
#define EC200S_GPIO_PIN 7
#define MAX_RECV_BUF_SIZE 256
#define SEND_CMD_PERIOD APP_TIMER_TICKS(98) // 98ms
#define SEND_DATA_PERIOD APP_TIMER_TICKS(98) // 98ms
#define RECV_CMD_PERIOD APP_TIMER_TICKS(100) // 100ms
#define RESET_PERIOD APP_TIMER_TICKS(3000) // 3s
/*********************************************************************
* GLOBAL VARIABLES
*/
extern char g_ec200sBuf[MAX_RECV_BUF_SIZE]; // 接收缓存
extern uint32_t g_ec200sCnt; // 接收计数
extern uint8_t g_isEc200sInit;
/*********************************************************************
* API FUNCTIONS
*/
uint8_t EC200S_Init(void);
void EC200S_GpioConfig(void);
void EC200S_Send(char *pString);
uint32_t EC200S_Receive(char *pRecvDataBuf);
void CreateSendCmdTimer(void);
void StartSendCmdTimer(void);
void StopSendCmdTimer(void);
void CreateSendDataTimer(void);
void StartSendDataTimer(void);
void StopSendDataTimer(void);
void CreateRecvCmdTimer(void);
void StartRecvCmdTimer(void);
void StopRecvCmdTimer(void);
void CreateResetTimer(void);
uint8_t ReceiveCommandHandler(void);
uint8_t ReceiveDataHandler(void);
#endif /* _BOARD_EC200S_H_ */
5.3 board_uart.c
/*********************************************************************
* INCLUDES
*/
#include "nrf_uart.h"
#include "app_uart.h"
#include "board_ec200s.h"
#include "board_uart.h"
#include "user_uart.h"
#include "nrf_log.h"
static void uart_handleEvent(app_uart_evt_t *pEvent);
/*********************************************************************
* LOCAL VARIABLES
*/
static uint8_t s_uartReadDataBuffer[UART_RX_BUF_SIZE] = {
0};
static uint8_t s_index = 0;
static bool s_begin = false;
/*********************************************************************
* PUBLIC FUNCTIONS
*/
/**
@brief 串口驱动初始化
@param 无
@return 无
*/
void UART_Init(void)
{
uint32_t errCode;
app_uart_comm_params_t const commParams =
{
.rx_pin_no = BOARD_UART_RX_IO,
.tx_pin_no = BOARD_UART_TX_IO,
.rts_pin_no = BOARD_UART_RTS_IO,
.cts_pin_no = BOARD_UART_CTS_IO,
.flow_control = APP_UART_FLOW_CONTROL_DISABLED, // 关掉流控
.use_parity = false,
#if defined (UART_PRESENT)
.baud_rate = NRF_UART_BAUDRATE_115200 // 波特率
#else
.baud_rate = NRF_UARTE_BAUDRATE_115200
#endif
};
APP_UART_FIFO_INIT(&commParams, UART_RX_BUF_SIZE, UART_TX_BUF_SIZE,
uart_handleEvent, APP_IRQ_PRIORITY_LOWEST, errCode);
APP_ERROR_CHECK(errCode);
}
/**
@brief 串口写数据函数
@param pData -[in] 写入数据
@param dataLen -[in] 写入数据长度
@return 无
*/
void UART_WriteData(uint8_t *pData, uint8_t dataLen)
{
uint8_t i;
for(i = 0; i < dataLen; i++)
{
app_uart_put(pData[i]);
}
}
/*********************************************************************
* LOCAL FUNCTIONS
*/
/**
@brief 串口读取数据处理函数
@param pEvent -[in] 串口事件
@return 无
*/
static void uart_handleEvent(app_uart_evt_t *pEvent)
{
uint8_t dataChar = 0;
switch(pEvent->evt_type)
{
// 已接收到UART数据
case APP_UART_DATA_READY:
{
UNUSED_VARIABLE(app_uart_get(&dataChar));
// 不是回车符或换行符则开始
if(dataChar != '\n' && dataChar != '\r')
{
s_begin = true;
}
if(s_begin)
{
s_uartReadDataBuffer[s_index] = dataChar;
s_index++;
}
// 遇到回车符或换行符结束
if((s_uartReadDataBuffer[s_index - 1] == '\n') ||
(s_uartReadDataBuffer[s_index - 1] == '\r') ||
(s_index >= MAX_RECV_BUF_SIZE))
{
// NRF_LOG_HEXDUMP_INFO(s_uartReadDataBuffer, s_index);
memcpy(g_ec200sBuf, s_uartReadDataBuffer, s_index); // 接收缓存
g_ec200sCnt = s_index; // 接收计数
if(!ReceiveCommandHandler())
{
ReceiveDataHandler();
}
memset(s_uartReadDataBuffer, 0, s_index);
s_index = 0;
s_begin = false;
}
} break;
// 接收过程中发生通信错误
case APP_UART_COMMUNICATION_ERROR:
APP_ERROR_HANDLER(pEvent->data.error_communication);
break;
// app_uart模块使用的FIFO模块中出现错误
case APP_UART_FIFO_ERROR:
APP_ERROR_HANDLER(pEvent->data.error_code);
break;
default:
break;
}
}
/****************************************************END OF FILE****************************************************/
5.4 board_uart.h
#ifndef _BOARD_UART_H_
#define _BOARD_UART_H_
/*********************************************************************
* INCLUDES
*/
/*********************************************************************
* DEFINITIONS
*/
#define UART_TX_BUF_SIZE 256 // UART TX buffer size
#define UART_RX_BUF_SIZE 256 // UART RX buffer size
#define BOARD_UART_TX_IO 6 // 发送引脚
#define BOARD_UART_RX_IO 8 // 接收引脚
#define BOARD_UART_CTS_IO 7 // 流量控制发送清除、低有效
#define BOARD_UART_RTS_IO 9 // 流量控制发送请求、低有效
/*********************************************************************
* API FUNCTIONS
*/
void UART_Init(void);
void UART_WriteData(uint8_t *pData, uint8_t dataLen);
#endif /* _BOARD_UART_H_ */
五、使用方法
#include "board_ec200s.h"
#include "board_uart.h"
int main(void)
{
log_init();
timers_init();
EC200S_GpioConfig(); // 4G模块PWK引脚初始化
UART_Init(); // 串口驱动初始化
power_management_init();
ble_stack_init(); // 协议栈初始化
gap_params_init();
gatt_init();
services_init(); // 服务初始化
advertising_init(); // 广播初始化
conn_params_init(); // 连接参数初始化
advertising_start(); // 开启广播
application_timers_start(); // 定时器应用开启
// Enter main loop.
for(;;)
{
idle_state_handle();
}
}
创建一个定时器每200毫秒进入一次回调函数
/**
@brief 检查网络定时器的回调函数
@param 无
@return 无
*/
static void timer_checkNetworkCallback(void *arg)
{
UNUSED_PARAMETER(arg);
if(g_isEc200sInit == 0)
{
g_isEc200sInit = EC200S_Init(); // 初始化4G模块
if(g_isEc200sInit == 1)
{
EC200S_Send("hello");
}
}
else if(g_isEc200sInit == 1)
{
char recvDataBuf[256] = {
0};
int recvDataLen = EC200S_Receive(recvDataBuf); // 接收服务器数据
if(recvDataLen > 0)
{
// 进入处理
}
}
}
• 由 Leung 写于 2020 年 12 月 4 日
• 参考:移远 EC200S 模组(4G Cat.1 通信模组)AT指令测试 TCP/UDP 通信过程
移远EC20 R2.0 AT指令拨号流程
Quectel EC20 R2.1 AT指令集(TCP/部分)