此文章为自己学习过程总结记录所用,如若侵权请告知删除
论文总结
一、研究背景
传统目标定位主要使用传感器存在传感器本身受机器所携带其他传感器的影响且不可识别目标物体的缺点,而视觉传感器实验环境要求松、成本低进而进行研究。视觉定位方法可分为基于单目视觉的定位、基于双目视觉的定位和基于全方位视觉的定位
二、研究框架
1.基于单目视觉
1.1 基于单目的目标定位模型
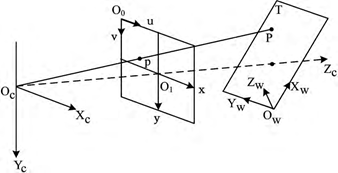
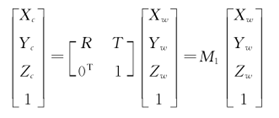
设空间一点 P 在摄像机坐标系下的坐标为( X c , Y c , Z c ,1 )T ,在世界坐标系下的坐标为(X w , Y w , Z w , 1 )T ,则两者之间的关系为:
( x,y)为p 点的图像坐标,( X c , Y c , C c )为空间点 P 在摄像机坐标系下的坐标,f 为摄像机焦距。用齐次坐标关系式表示上述投影关系:

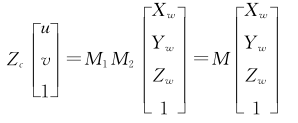
则像素坐标系中一点和世界坐标系一点对应关系为:
2.基于双目视觉
单目视觉视野范围小、获取深度信息少、定位精度低,双目视觉逐渐成为视觉领域研究热点.
而如何在左、右摄像机采集的图像中选取具有空间位置一致性的目标点一直是双目视觉技术的难点和关键,将基于双目视觉的目标定位研究分为基于特征点的双目视觉定位方法、基于区域的双目视觉定位方法以及基于特征和区域联合的双目视觉定位方法。
2.1基于特征点的双目视觉定位方法
| 算法 | 优点 | 缺点 |
|---|---|---|
| Harris | l灵活性高、稳定性强 | 平移、旋转发证变化时匹配效果较差 |
| SIFT | 平移、旋转发证变化时鲁棒性好 | 计算复杂度较高、实时性较差 |
| SURF | 实时性较好 |
2.2 基于区域的双目视觉定位方法
基于区域的立体视觉定位方法以区域匹配算法作为基础,能够获得稠密、均匀的图像视差图,并具有一定的匹配精度;但是,其对于图像旋转和外界光照的变化较为敏感,鲁棒性较差,不能够处理图像中纹理相似区域或遮挡图像区域 。区域匹配算法即选取该像素点邻域内的一个子窗口,在另一幅图像中的一个区域内根据某种相似性测度算法,寻找与子窗口图像最为相似的子图,而其匹配的子图中对应的像素点就为该像素的匹配点。
 2.3 基于特征和区域联合的双目视觉定位方法
2.3 基于特征和区域联合的双目视觉定位方法
针对区域匹配与特征匹配两种算法的优势与不足,采用互补策略,充分利用区域匹配视差图的致密性以及特征匹配视差图的鲁棒性 将两种算法结合起来,提出了一种基于特征和区域联合的双目视觉定位方法。
3.基于全方位视觉的定位方法
目前全方位视觉传感器主要分为两类,一类为传统视觉传感器组成的全方位视觉传感器,另一类为反射镜面型全方位视觉传感器。前者全方位视觉传感器需要对大量的视觉信息进行处理,计算量大,难以达到实时性。后者反光镜的镜面形状会造成全方位图像的分辨率分布不均匀且有较大的畸变,加上曲面反光镜的水平截面为圆形,造成全方位图像也为圆形,很难直接处理。但其计算量小,不需要解决前者全方位视觉传感器的图像融合问题,因此被广泛应用于目标检测和视觉跟踪。