本文是我按照教材《摄影测量学》(第三版,武汉大学出版社,王佩军、徐亚明主编)总结的,供自己记录学习过程、准备期末考试,顺便也分享给大家。每一个字都是手动敲的哦。不知道这样的文章会不会涉及版权问题,侵犯则删。
第一章 绪论
1.摄影测量学:利用摄影机摄取像片,通过像片来研究和确定被摄物体的大小、位置、形状和互相关系的一门科学技术。
2.摄影测量按摄影机平台位置的不同可以分为:航天摄影测量、航空摄影测量、地面摄影测量、水下摄影测量。按摄影机平台距离被摄物体的远近可以分为:航天摄影测量、航空摄影测量、地面摄影测量、近景摄影测量、显微摄影测量。按用途可分为:地形摄影测量、非地形摄影测量。
3.摄影测量学发展的三个阶段:模拟摄影测量、解析摄影测量、数字摄影测量。
4.模拟摄影测量:在室内用光学机械投影器模拟摄影过程,交汇出被摄物体的空间位置,建立与实地相似的缩小模型,再在该模型上进行测量。
5.解析摄影测量:在计算机的辅助下,将建立的投影光束、单位模型或航带模型以及区域模型的的数学模型根据少量的地面控制点,按照最小二乘原理,计算出加密点的地面坐标。
6.数字摄影测量:利用数字影像信息、基于摄影测量学原理和计算机视觉相结合,从数字影像中自动(或半自动)地提取出有用的影像信息并用数学方式表达几何信息。
7.4D产品:DEM(Digital Elevation Model,数字高程模型),DOM(Digital Orthophoto Map,数字正射影像图),DRG(Digital Raster Graphic,数字栅格地图),DLG(Digital Line Graphic,数字线划图)。
第二章 影像获取
1.主距:物镜中心到底片的距离。
2.焦距:物镜中心到焦点的距离。
3.主光轴:物镜中心到相框平面的距离。
4.像场:物镜焦面上成像清晰的范围。
5.像场角:像场直径对物镜中心所成的夹角。
6.中焦距摄影机:焦距大于150mm小于300mm。
第三章 摄影测量基础知识
1.摄影比例尺1/m(也叫像片比例尺):它的严格定义为航摄像片上一条线段l与地面上相应线段的水平长度L之比,即1/m=l/L;但由于航空摄影时,像片不能保证严格水平,且地面也会有起伏,这就导致像片上各点的比例尺都不一样,所以我们说的像片比例尺其实是平均像片比例尺,用物镜焦距与摄影区域内的平均航高的比来表示,即1/m=f/H。
2.摄影测量生产对摄影资料的要求:像片的色调要好,航向重叠要大于60%,旁向重叠要大于30%,像片倾角(摄影机主轴与铅锤方向的夹角)要小于2°,航向弯曲(最大偏距与航线总长的比)不超过3%,像片旋角(相邻像片的主点连线与像幅沿航线方向两标框连线间的夹角)小于6°。
3.平行投影:投影光线互相平行的投影。
4.正射投影:投影光线互相平行且垂直于投影面的投影。
5.中心投影:投影光线汇于一点的投影。
6.航摄像片上特殊的点线面: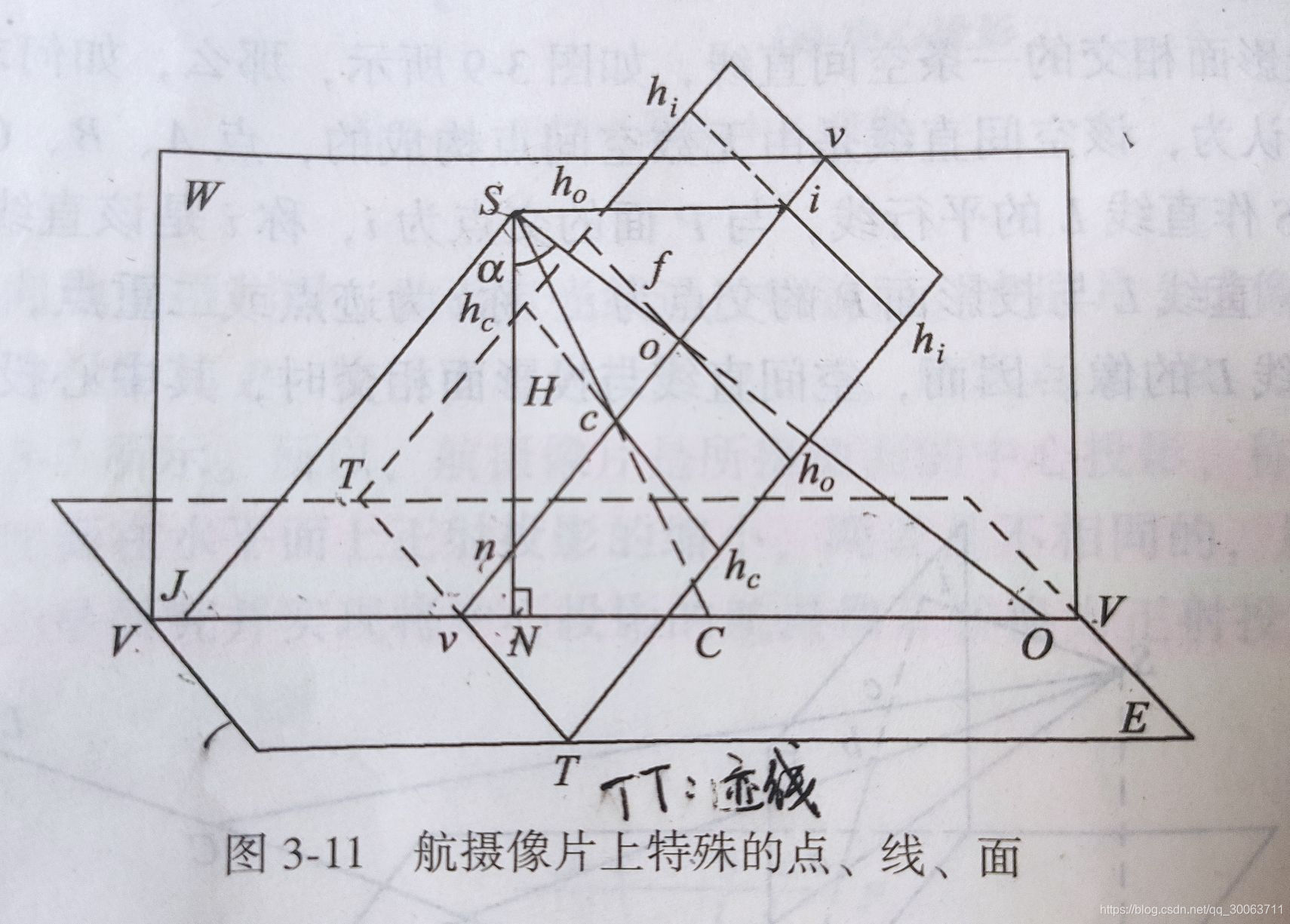
(1)摄影中心S:摄影机的物镜中心。
(2)像主点o:过摄影中心S向像平面P做的垂线与像平面P的交点。
(3)摄影机轴So:过摄影中心S和像主点o的直线So。
(4)摄影机主距So:线段So的长度。
(5)地面主点O:摄影机轴So与水平地面E的交点。
(6)主垂线SN:过摄影中心S向水平地面E做的铅垂线。
(7)像底点n:主垂线SN与像平面P的交点。
(8)地底点N:主垂线SN与水平地面E的交点。
(9)航高H:摄影中心S到水平地面E的距离,即线段SN的长度。
(10)像片倾角α:摄影机轴So与主垂线SN之间的夹角。
(11)等角点c:像片倾角α的角平分线与像平面P的交点。
(12)地面等角点C:像片倾角α的角平分线与水平地面E的交点。
(13)主垂面W:过主垂线SN和摄影机轴So的垂面。
(14)主纵线vv:主垂面W与像平面P的交线。
(15)基本方向线VV:主垂面W与水平地面E的交线。
(16)合面Es:过摄影中心S做的与水平地面E平行的平面(未画出)。
(17)合线hihi:合面Es与像平面P的交线。
(18)主合点i:合线hihi与主纵线vv的交点。
(19)等比线hchc:过等角点c做的与合线hihi平行的直线。
(20)主横线hoho:过像主点o做的与合线hihi平行的直线。
7.像平面坐标系:在像片上以像主点o为原点做的右手平面坐标系。但在实际应用中,常以标框连线的交点为原点、以与航线相近的连线为x轴,构成右手平面坐标系。
8.像空间坐标系:以摄影中心S为原点,x、y轴分别平行于像平面坐标系的x、y轴,z轴与光轴重合建立的空间坐标系。
9.像空间辅助坐标系:是空间右手直角坐标系。它的x、y、z轴用u、v、w来表示,常有3种选取方法。
(1)u、v、w轴分别平行于地面摄影测量坐标系D-XYZ的X、Y、Z轴。
(2)以每条航线第一张像片的像空间坐标系为像空间辅助坐标系。
(3)以每个立体像对的左片的摄影中心S为原点,以摄影基线为u轴,以摄影基线和左片的光轴构成的平面为uw面,以过原点且垂直于uw面的直线为v轴。
10.地面测量坐标系:通常是指高斯-克吕格6°带或3°带投影的平面直角坐标系(如1954年北京坐标系和1980西安大地坐标系)与定义的某一基准面起量的高程(如1956黄海高程或1985国家基准高程),两者结合而成的空间左手直角坐标系。用T-XtYtZt表示,用摄影测量的方法求得的地面坐标值都要转换成此坐标系下的坐标值方能提交给用户。
11.地面摄影测量坐标系:是以测区内某一地面点为原点,以与航向大致一致的水平方向为X轴,以与X轴正交的直线为Y轴,以铅锤方向为Z轴,构成的空间右手直角坐标系。建立这个坐标系的目的是作为一种从像空间辅助坐标转化为地面测量坐标的过渡,以方便计算。
12.内方位元素:表示摄影中心S与像片之间的位置关系的参数,为x0、y0、f。
13.外方位元素:表示(摄影中心S和像片)与地面坐标系之间的位置关系和姿态关系的参数。为φ、ω、κ、Xs、Ys、Zs。如图:
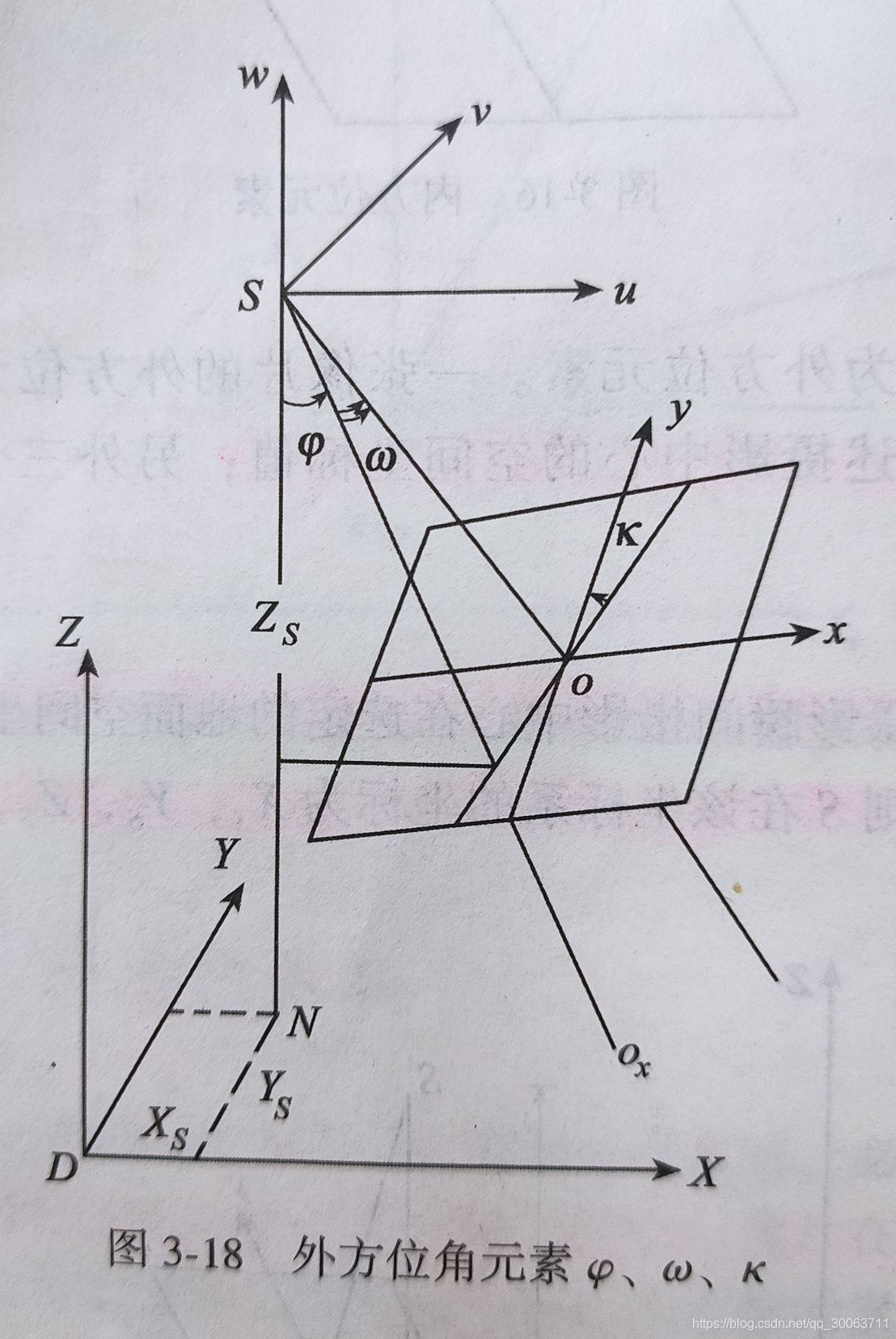
14.从像空间坐标系到像空间辅助坐标系的变换公式:
[ u v w ]T = [ a1 a2 a3, b1 b2 b3, c1 c2 c3] [ x y -f ]T = R[ x y -f]T
其中,R矩阵为方向余弦ai、bi、ci组成的,方向余弦可由三个外方位角元素经三角函数组合表示出来。
15.共线方程的推导:
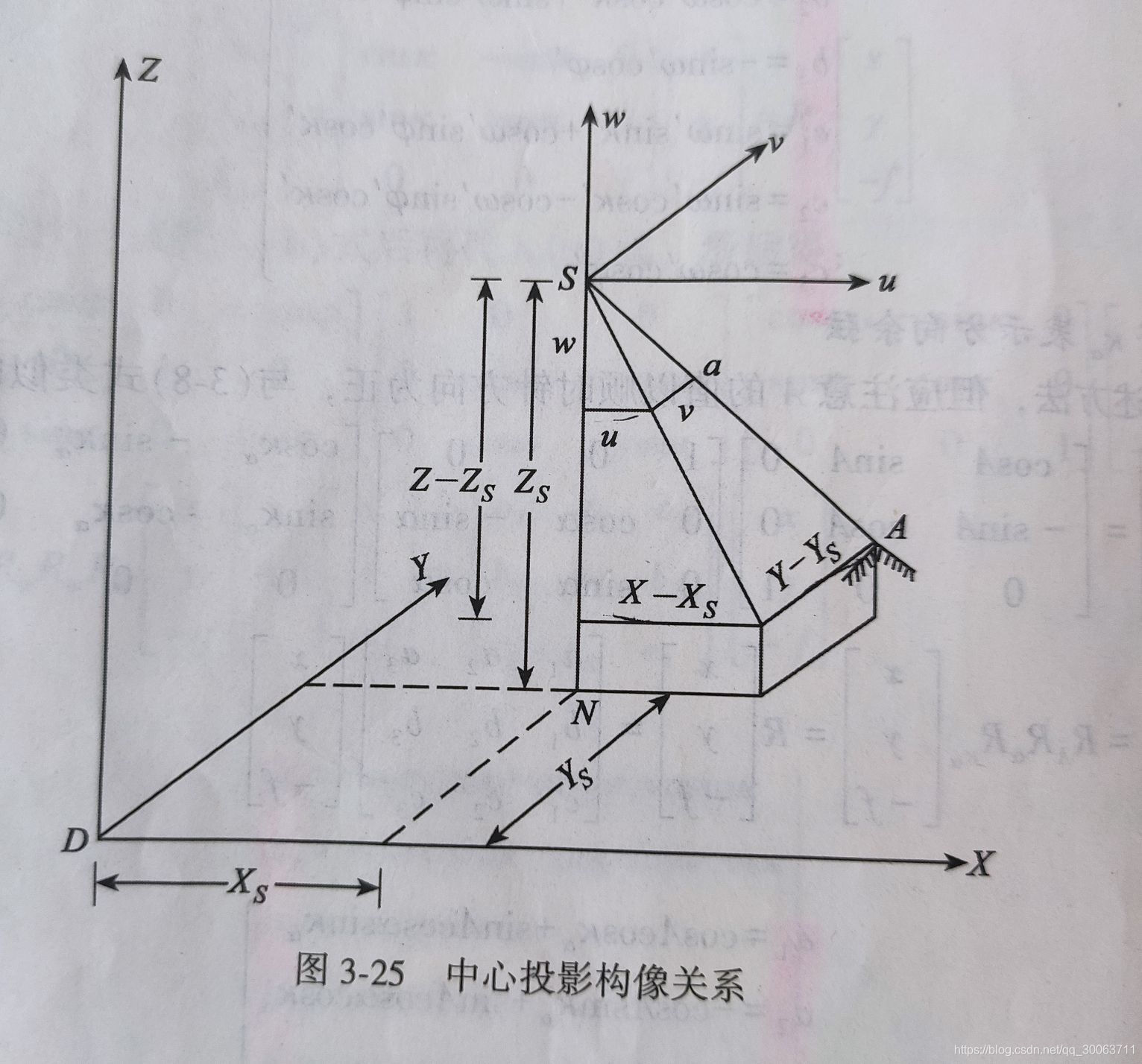
光是沿直线传播的,因此摄影中心S、像点a(x, y, -f)、对应地面点A(X, Y, Z)是在一条直线上的。则,由相似三角形得:
u/(X-Xs) = v/(Y-Ys) = w/(Z-Zs) = 1/λ
即[ u v w ]T = (1/λ)[ X-Xs Y-Ys Z-Zs ]T
上式联立从像空间辅助坐标系到像空间坐标系的变换公式:[ x y -f ]T = R-1[ u v w ] ,并消去λ,即得到共线方程:
x = -f*[ a1(X-Xs)+b1(Y-Ys)+c1(Z-Zs)] / [a3(X-Xs)+b3(Y-Ys)+c3(Z-Zs)]
y = -f*[ a2(X-Xs)+b2(Y-Ys)+c2(Z-Zs)] / [a3(X-Xs)+b3(Y-Ys)+c3(Z-Zs)]
16.共线方程的主要应用包括:
(1)单像空间后方交会和多像空间前方交会;
(2)在光束法区域网空中三角测量中的作为基本数学模型;
(3)是构成数字投影的基础;
(4)利用DEM与共线方程制作正射影像;
(5)利用DEM和共线方程进行单幅影像制图。
17.像点位移:因为航摄像片是地面的中心投影,所以当地面地形有起伏或者像片不水平的时候,地面点在像片上的构象就会与正确位置产生偏移,这种现象称为像点位移。对像点位移的改正叫做像片纠正。
18.引起像片位移产生的因素有:地面有起伏、像片不水平、物镜畸变、大气折光、地球曲率、底片形变等。
19.航摄像片与地形图的区别:
(1)表示方法和内容不同。地形图是按规定的各种符号、注记、等高线来描述地形地貌的,且内容有取舍;而航摄像片则表示为影像的大小、形状、色调,内容全部展示。
(2)投影方法不同。航摄像片是中心投影,地形图是正射投影。
第四章 双像立体测图原理与立体测图
1.生理视差:肉眼前的2个点A和B因距离眼睛的距离不相等,因此它们在左眼网膜窝和右眼网膜窝留下的弧长也不相等,弧长的差即为生理视差。生理视差是产生立体视觉的根本原因。
2.产生人造立体视觉的四个条件:
(1)两张像片必须是在两个不同位置对同一地物摄取的像片。
(2)分像:每只眼睛必须只能观察像对的一张像片。
(3)两张像片上的同名像点的连线必须与眼睛的基线大致平行。
(4)两张像片的比例尺应该相近(相差<15%)。
3.实现分像的方法:
(1)立体镜观察法(如使用桥式立体镜)。
(2)双目镜观测光路的立体观察。
(3)互补色法立体观察。
(4)同步闪闭法立体观察。
(5)偏振光法立体观察。
(6)立体量测。
4.立体像对上特殊的点线面:
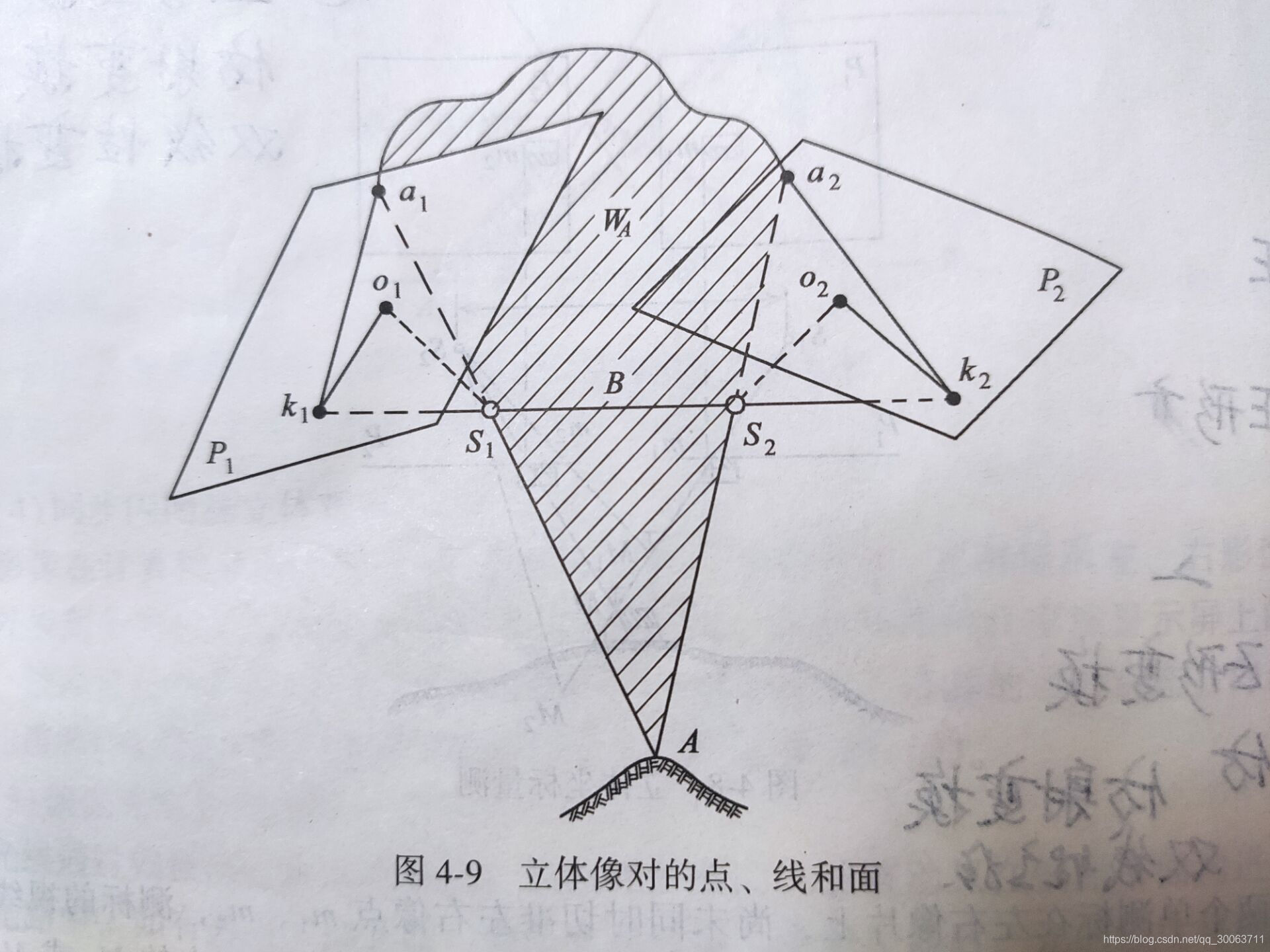 (1)摄影基线B:立体像对的两个摄影中心的连线。
(1)摄影基线B:立体像对的两个摄影中心的连线。
(2)同名像点a1、a2:由同一地面点A在左右像片上的构象。
(3)同名射线ASa1、ASa2:由同一地面点A发出的射向两个摄影中心的射线。
(4)核面W:过摄影基线B和某一地面点A的平面。
(5)核线k1a1、k2a2:核面W与像平面的交线。
(6)核点k1、k2:基线B与像平面的交点。
(7)主核面:刚好通过像主点的核面。
(8)垂核面:刚好通过像底点的核面。
5.立体摄影测量(亦称双像立体测图):利用一个立体像对,在恢复了它们的内、外方位元素后,建立与实地相似的立体几何模型,并对其进行量测的摄影测量方法。
6.内定向:指恢复立体像对的内方位元素的过程。目的是恢复摄影瞬间时的光束,确定像主点在像平面坐标系中的坐标。
7.相对定向:指重建与实地相似的立体几何模型的过程。完成相对定向后,就能重建与实地相似的立体几何模型,但是这个模型的大小和空间方位时任意的。相对定向有5个元素。
8.绝对定向:指借助已知的地面控制点,把经过了相对定向的立体几何模型进行平移、旋转、缩放,将其纳入到地面摄影测量坐标系的过程。对经过了绝对定向的立体几何模型进行量测,就能得到地面点的地面摄影测量坐标系坐标。绝对定向有7个元素,为:Xs、Ys、Zs、λ、Φ、Ω、Κ。
9.上下视差Q:上下移动承影面,使得左右投影光线在X方向上没有偏离而只在Y方向上有偏离,Y值的差即为上下视差。上下视差是检核立体像对有没有完成相对定向的标志,如果完成了相对定向,则Q=0。
10.连续像对相对定向:将左片置平,以左片的像空间坐标系为本像对的像空间辅助坐标系。相对定向元素为为:bv、bw、φ2、ω2、κ2。
11.单独像对相对定向:将摄影基线置平,以摄影中心为原点,以摄影基线为u轴,以摄影机轴和主垂线构成的平面为uw面,以过摄影中心且与uw面垂直的直线为v轴构建像空间辅助坐标系。相对定位元素为:φ1、κ1、φ2、ω2、κ2。
12.绝对定向的基本关系式(即从像空间辅助坐标系变换到地面摄影测量坐标系的公式,也叫做空间相似变换式):
[ X Y Z ]T = λ [ a1 a2 a3, b1 b2 b3, c1 c2 c3 ][ U V W ] T+ [ Xs Ys Zs ]T
第五章 摄影测量解析基础
1.左右视差p:立体像对中左右像片的同名像点在各自的像平面坐标系中的x坐标之差,即p = x1-x2。
2.上下视差q:立体像对中左右像片的同名像点在各自的像平面坐标系中的y坐标之差,即q = y1-y2。
3.单像空间后方交会:利用至少3个已知的地面平高控制点,并量测出像片上对应的3个像点的坐标,以共线方程为基础,反求该像片的外方位元素。
4.单像空间后方交会的解算过程:
(1)获取已知数据。如像片比例尺1/m、平均航高H、内方位元素x0、y0、f、3个以上的地面平高控制点坐标(并将其转化为地面摄影测量坐标),且这三个控制点不在同一条直线上。
(2)量测控制点对于的像点坐标。
(3)确定待求数(6个外方位元素)的初始值。在竖直摄影的情况下,φ0=ω0=κ0=0°,Zs0=mH,Xs0、Ys0取控制点的平均值。
(4)计算旋转矩阵R。利用角元素的近似值计算方向余弦,组成R阵。
(5)利用待求数初始值和共线方程,计算控制点像点的坐标近似值。
(6)组成误差方程。
(7)组成法方程。
(8)计算出外方位元素的改正值,并将其加到初始值上,得到外方位元素近似值。
(9)重复第四步到第八步,直到迭代趋于收敛。
5.立体像对的前方交会:利用立体像对的内、外方位元素和像点坐标,由同名射线必然交于一点的原理来确定相应地面点的地面坐标。
6.立体像对的前方交会的解算过程:
(1)获取已知数据。即两张像片的内、外方位元素。
(2)量测像点坐标。
(3)由角元素计算旋转矩阵R1、R2。
(4)计算摄影基线分量。
(5)计算像点在左右像空间辅助坐标系中的坐标。
(6)计算投影系数N1、N2。
(7)计算待定点的地面摄影测量坐标系。
7.总结后交-前交法的解算步骤:
(1)在立体像对的重叠部分所对应的实地测出至少3个控制点坐标,且三这3个控制点不在同一条直线上,并将其转化为地面摄影测量坐标系坐标。
(2)量测控制点对应的像点的坐标。
(3)用后方交会法计算出两张像片的外方位元素。
(4)用前方交会法计算出待定点的地面坐标i。
8.立体像对的解析法相对定向:由共面条件出发,计算出相对定向的5个元素,从而建立与实地相似的立体几何模型。
9.共面条件:指同名射线S1a1和S2a2交于一点时,向量B、向量S1a1、向量S2a2必然共面,三个向量共面,则它们的混合积为0。即:B ×(S1a1·S2a2)= 0。混合积为0是完成相对定向的标准。
10.连续像对相对定向元素计算流程:
(1)输入同名像点的像点坐标。
(2)确定相对定向元素的初始值:bv=bu=φ2=ω2=κ2=0。
(3)计算右片的方向余弦。
(4)计算像点的像空间辅助坐标。
(5)计算误差方程的系数和常数项。
(6)对误差方程进行法化并累加。
(7)重复第3步至第6步,直到所有定向点都计算完毕。
(8)解法方程,求得改正数。
(9)求未知数的新值。
(10)检查改正数是否小于限差,如不小于,则重复第2步至第9步,直到改正数小于限差。
(11)得到未知数最终的解。
11.立体像对的解析法绝对定向:利用至少2个平高控制点和1个高程控制点,从绝对定向的基本关系式出发,求解7个绝对定向元素λ、Φ、Ω、Κ、Xs、Ys、Zs。
12.绝对定向的基本关系式(也叫空间相似变换式,实质为从像空间辅助坐标系变换到地面摄影测量坐标系的关系式):
[ X Y Z ] T= λ[ a1 a2 a3, b1 b2 b3, c1 c2 c3 ] [ U V W ]T+[ Xs Ys Zs ]T
13.解析法绝对定向的计算流程:
(1)确定待求参数的初始值:λ=1、Φ=Ω=Κ=0°、Xs=Ys=Zs=0。
(2)计算地面控制点在地面摄影测量坐标系中的重心坐标和重心化坐标。
(3)计算地面控制点在像空间辅助坐标系中的重心坐标和重心化坐标。
(4)计算常数项。
(5)计算误差方程的系数。
(6)逐点法化及法方程求解。
(7)计算待定参数的新值。
(8)判断待求参数的改正值是否小于限差,若不小于,则用待定参数的新值的新值重复上述步骤,直到满足限差。即求得了最终的7个绝对定向元素。
(9)然后可以根据待求点的重心化的像空间辅助坐标,化为重心化的地面摄影测量坐标,再加上重心坐标,就获得了正常的地面摄影测量坐标,最后化为地面测量坐标就可以提交成果了。
14.总结相对定向-绝对定向法的解算步骤:
(1)用连续像对或单独像对的相对定向元素的误差方程式求解像对的相对定向元素。
(2)组成左右像片的旋转矩阵R1、R2,并利用前方交会式求出像点在像空间辅助坐标系中的坐标。
(3)根据已知的地面控制点,按绝对定向元素的误差方程式求解该立体模型的7个绝对定向元素。
(4)按绝对定向公式将所有的待定点的坐标纳入到地面摄影测量坐标系。
15.立体像对的光束法严密解(也叫一步定向法):两张像片内的所有控制点和未知点都按共线方程列出误差方程式,在像对内进行联合解算,同时求出两张像片的外方位元素和未知点的坐标。这种方法的理论较为严密、精度较高,是一种比较好的解法。
16.光束法严密解也是利用从近似值开始迭代,直到满足限差为止的方法。通常用后方交会-前方交会法求出的外方位元素和待定点坐标作为光束法严密解的初始值。
17.双像解析摄影测量三种解法的比较:
(1)后方交会-前方交会法:前方交会的结果依赖于后方交会的精度,前方交会的过程中没有充分利用多余条件进行平差计算。
(2)相对定向-绝对定向法:计算公式较多,最终的点位精度取决于相对定向和绝对定向的精度,这种方法不能严格地表达外方位元素。
(3)光束法严密解:理论严密、精度最高。待定点的坐标是按最小二乘原则求得的。
(4)基于以上分析可知。后方交会-前方交会法常在已知像片的外方位元素、需确定少量待定点坐标时采用;相对定向-绝对定向法多在航带法空中三角测量中采用;光束法严密解在光束法解析空中三角测量中采用。
第六章 解析空中三角测量
1.解析空中三角测量(俗称摄影测量加密)的定义:根据航摄像片上所量测的像点坐标和极少量的地面控制点,按一定的数学模型平差解算出所需的全部加密点和每张像片的外方位元素。
2.解析空中三角测量的意义:
(1)不触及被量测目标即可测定其位置和形状。
(2)可快速地在大范围测区内进行点位测定,从而节省野外测量工作量。
(3)不受通视条件的限制。
(4)平差时,区域内部精度均匀。且不受区域大小的限制。
3.解析空中三角测量的目的:
(1)为测绘地形图提供定向控制点和像点定向参数。
(2)测定大范围内界址点的统一坐标。
(3)单元模型中大量地面点坐标的计算。
(4)解析近景摄影测量和非地形摄影测量。
4.解析空中三角测量的分类:
(1)按数学模型可分为:航带法、独立模型法、光束法。
(2)按平差范围可分为:单模型法、航带法、区域网法。
5.影像连接点的类型:
(1)明显地物点
(2)标志点
(3)人工转刺点
(4)仪器转刺点
(5)数字影像相关转点
6.像点坐标的系统误差因素:
(1)底片变形
(2)摄影机物镜畸变
(3)大气折光
(4)地球曲率
7.航带网法空中三角测量:首先在一个立体像对中,用连续法相对定向建立单个模型,然后把单个模型连接成航带模型,以构成航带自由网,再把航带模型视为一个单元模型进行绝对定向,最后再进行非线性改正。就可以最终求得加密点的地面坐标了。
8.比例归化系数k:指在进行模型连接时,使将后一个模型的比例尺归化到前一个模型的比例尺中的系数。从而能建立全航带统一的比例尺。k=(k1+k2+k3)/3。k1、k2、k3指立体像对中重叠部分上中下区域各取一个点的比例归化系数。
9.航带模型需要进行非线性改正的原因:在模型连接时误差会传递、累积,而航带网的绝对定向只能将整个航带纳入到地面摄影测量坐标系中,并不能改正航带网的变形。
10.航带模型非线性改正的基本原理:用多项式曲面来拟合、逼近复杂的变形曲面,利用提供的控制点与加密值之间的不符值,通过最小二乘拟合,使控制点处在拟合曲面上的变形值与实际相差最小。
11.航带模型非线性改正式的系数:非线性改正是多项式曲面来拟合复杂的变形曲面的。非线性改正式通常可采用三次多项式来拟合,则系数有21个(需要21/3=7个平高控制点来求解);若采用2次多项式来拟合,则系数有15个(需要15/3=5个平高控制点来求解)。
12.航带网法区域网平差的步骤(作业流程):
(1)按单航带模型法分别建立航带模型,以取得各航带模型点在本航带统一的像空间辅助坐标系坐标。
(2)进行各航带的绝对定向。
(3)计算重心坐标和重心化坐标。
(4)根据模型中控制点的加密坐标应与外业实测坐标相等以及相邻航带间的公共连接点应相等为约束条件,列出误差方程,并用最小二乘准则平差计算,整体求解各航带的非线性改正系数。
(5)用平差得到的非线性改正系数分别计算各模型点改正后的坐标值。
13.独立模型法空中三角测量的作业流程:
(1)单独法相对定向建立单个模型,获取各模型的模型坐标,包括摄站点。
(2)利用相邻模型的公共点和所在模型中的控制点,各单元模型分别做三维线性变换,按各自的条件列出误差方程式和法方程式。
(3)建立全区域的改化法方程式,并按循环分块的方法求解,求得每个模型点的7个绝对定向元素。
(4)按平差后求得的7个绝对定向元素计算每个单元模型中待定点的坐标,若为相邻模型的公共点,则取其均值作为最后结果。
14.光束法区域网空中三角测量的作业流程:
(1)获取(每张像片的外方位元素和待定点坐标)的近似值。
(2)从每张像片上的控制点、待定点的像点坐标出发,按共线条件列出误差方程式。
(3)逐点法化建立法方程式,按循环分块的方法先求出每张像片的外方位元素。
(4)按空间前方交会的方法求出待定点的地面坐标。若为相邻像片的公共点,则取平均值作为最后结果。
15.三种区域网平差方法的比较:
(1)航带网法区域网平差:数学模型为非线性多项式的改正公式,平差单元为一条航带,观测值为像点坐标,未知数为非线性多项式的改正系数。特点是方便、速度快、但精度不高。
(2)独立模型法区域网平差:数学模型为空间相似变换式,平差单元为独立模型,观测值为模型的坐标,未知数为各模型空间相似变换式里的7个参数和待定点的地面摄影测量坐标。特点是未知数较多,将平面和高程分开求解仍能得到严密平差的结果。
(3)光束法区域网平差:数学模型是共线条件方程,平差单位为单个光束,观测值为像点坐标,未知数为每张像片的外方位元素和待定点的地面摄影测量坐标。特点是逻辑最严密、已成为主流方法,但未知数较多、计算量较大,这也影响了求解速度。
16.GPS辅助空中三角测量:一种利用带有GPS的摄影系统直接获取摄影瞬间摄影中心的空间位置,从而可以极大地减少地面控制点的数目的技术。
17.机载POS系统对地定位:利用GPS获取摄站点的位置信息、利用IMU记录航摄相机的角度变化信息,从而直接解算出摄影瞬间的像片的6个外方位元素,这样就可以无需地面控制点甚至无需空中三角测量工序而直接实现测图或定位。
18.GPS辅助空中三角测量和机载POS系统的主要区别:前者只能获取摄影瞬间 摄影中心的空间位置坐标,而后者不仅能获取摄影瞬间 摄影中心的空间位置坐标,因其装有惯性量测单元IMU,所以它还能获取摄影瞬间 像片的姿态参数。
19.影响POS系统定向精度的因素:
(1)位置精度:包括GPS定位误差、设备时间同步误差、偏心分量测量误差。
(2)角度误差。
(3)内方位元素误差。
(4)坐标系转换误差。
第七章 数字地面模型的建立及其应用
老师不讲,略。
第八章 数字摄影测量基础
1.灰度(也叫光学密度)D:阻光率取对数。即D = lg(F0/F)。
2.采样:对实体像片每隔一个间距Δ读取一个点的灰度值的过程。
3.灰度量化:将像片上有可能出现的最大灰度范围进行等分,分成若干个灰度级(通常为256级),当某个像素点的灰度值落在某个灰度级内时,就取该灰度级为这个像素点的新灰度值。灰度量化的目的是把所有像素点的灰度变为整数,以方便计算。
4.数字影像:数字影像的实质是一个规则排列的灰度格网序列,它只记录采样点的灰度值。
5.常用的重采样方法:最邻近像元法、双线性内插法、双三次卷积法。
6.基于灰度的数字影像相关:首先在左片上确定一个待定点,称之为目标点,以该点为中心选取n×n的灰度矩阵为目标窗口(n为奇数),在右片上定出一个a×b的灰度矩阵(a>n,b>n)作为搜索区,以一个与目标窗口同样形状的搜索窗口去遍历搜索区,在遍历的过程中计算这两个窗口的相似性测度,取相似性测度最高的搜索窗口的中心像元为目标点的同名像点。
7.几种基本匹配算法(相似性匹配测度):
(1)协方差法(越大越好)
(2)相关系数法(越大越好)
(3)相关函数法(越大越好)
(4)差平方和(越小越好)
(5)差绝对值和(越小越好)
8.VLL法的原理:已知A点的物方平面坐标,首先粗略估算出A点的高程范围,然后在A点处设置一条铅垂线,当A点沿着这条铅垂线在它的高程范围内上下移动时,总有一处位置,使得A点在左右像片上的构象为中心的目标窗口和搜索窗口的相关系数最高,则此时A点所在高程值即为A点的真实高程值,此时目标窗口和搜索窗口的中心像元即为同名像点。如下图:
9.提高VLL法匹配精度的方法:
(1)减小高程迭代步长ΔZ。
(2)拟合出相似性测度的二次函数,用极值点对应的高程值来作为最后高程结果。
10.影像灰度的系统误差来源:辐射畸变、几何畸变。
11.一维最小二乘影像匹配:搜索窗口不断地在搜索区移动一个整像素,在移动的过程中计算相关系数,以相关系数最高的窗口的中心像元为同名像点,且将搜索窗口的位移量作为一个参数引入到最小二乘影像相关算法中,就可以最直接解算像点移位。
12.最小二乘匹配的思想:在影像匹配中引入辐射畸变和几何畸变的参数,用最小二乘法求出这些参数。
13.二维最小二乘影像匹配的具体步骤:
(1)几何变形改正。
(2)重采样。
(3)辐射畸变改正。
(4)计算目标窗口和搜索窗口的相关系数。
(5)采用最小二乘影像相关,求解变形参数的改正值。
(6)计算变形参数。
(7)计算最佳匹配点位。
14.最小二乘影像匹配精度:
(1)相关系数越大,精度越高。
(2)信噪比越大,精度越高。
(3)纹理结构越明显,精度越高。
15.特征匹配:指从从影像中提取到的特征为共轭实体,而将所提取的特征的属性或特征的描述参数作为匹配实体,通过计算匹配实体的相似性匹配测度以实现共轭实体配准的影像匹配方法。
16.特征匹配的三大步骤:
(1)特征提取
(2)候选特征点的确定
(3)变换参数估计或最终的特征对应。
17.金字塔影像相关:从粗到精的相关策略,先低通进行初相关,找到同名点的粗略位置,再高通,找到精确位置。
18.提取特征的两种分布模式:
(1)随机分布。
(2)均匀分布。
19.基于点特征的影像匹配算子的基本原理:
(1)Moravec算子:考虑某一像素与周围像素间的灰度差,以4个方向上具有最小-最大灰度方差的像素为特征点。
(2)Forstner算子:在影像中寻找具有最可能小且近似圆的误差椭圆的像素作为特征点。
20.特征点的匹配顺序:
(1)深度优先。
(2)广度优先。
21.SIFT算法:先找到尺度空间的极值点,然后用拟合函数的方法确定哪些是关键点,位置在哪,然后计算梯度,以最大的方向为主方向,再对两幅影像进行对比,梯度最接近的就是匹配特征点,最后用RANSAC算法纠错。
22.SIFT算法实现物体识别的步骤:
(1)关键点的检测。
(2)关键点的描述。
(3)关键点的匹配。
(4)去除错配点。
22.SIFT算法的特点:
(1)鲁棒性。对气候不同、光照强度不同、角度不同、比例尺不同等的像片也能比较准确地匹配出同名像点。
(2)多量性。少数物体可产生大量SIFT特征向量。
(3)独特性。可以在大量数据中进行准确、快速的定位。
(4)拓展性。可以与其他形式的特征向量结合。
(5)运行速度快。
第九章 像片纠正与正射影像图
老师不讲,略。
第十章 摄影测量的外业工作
老师不讲,略。
另,近十年出现的应用于摄影测量学的计算机技术
(是老师最后补充的内容,根据PPT总结)
1.深度学习(DL,Deep Learning):深度学习是机器学习的一种算法,其特点是包含多隐层的人工神经网络结构。
2.卷积神经网络(CNN,Convolutional Neural Network):卷积神经网络是一种深度学习算法,其通过局部感知野和参数共享降低参数数目。
3.循环神经网络(RNN,Recurrent Neural Network):循环神经网络是一类以序列数据为输入,在序列的演进方向进行递归且所有节点(循环单元)按链式连接的递归神经网络。
4.深度学习基本都是由三个步骤组成的:
(1)定义一组函数。
(2)计算函数优度。
(3)选择最优函数。
喜欢点个赞,我会超开心(●’◡’●)