高超声速飞行器是指飞行马赫数大于5的飞行器,它是一种近空间飞行器。“近空间”可简单理解为:现有飞机飞行的最高高度(约20Km)和卫星运行轨道的最低高度(约100Km)间的空域。近空间飞行器可定性描述为:能持久稳定运行于近空间执行特定任务的各种飞行器。近空间飞行器的发展涉及国家安全与和平利用空间,是目前国际竞相争夺空间技术的焦点之一,是综合国力的体现。近空间飞行器的出现将促生新的作战样式,改写联合作战理论,并对未来技术局部战争产生重大影响。
高超声速飞行器与常规的飞行器相比其整体布局采用机身发动机一体化设计,这使得各个子系统之间具有更强的耦合性和非线性。为了满足高超声速飞行器在复杂的飞行条件下仍然拥有稳定的飞行性能和良好的飞行品质,必须采用全新的控制手段。
本文主要对高超声速飞行器模型进行分析,采用极点配置方法、LQR控制与控制三种方法设计控制器,并比较反馈系统之间的调节性能和抗干扰性能。
从高超声速飞行器纵向运动方程中的状态来看,可以将5个状态分成快慢不同的变量。转动角速度矢量如俯仰角速率,由于该变量变化快,故称之为快变量,快变量时为增加飞行器转动阻尼所必须的;姿态矢量如迎角是慢变量,它的产生是由角速度矢量经过一次积分形成的,该状态变量时大迎角机动控制和稳定所必需的;速度矢量如飞行速度比姿态矢量还慢称之为较慢变量,因为它的产生是由推力和相对于速度轴的姿态矢量产生的法向力和侧向力经一次积分后形成的,该状态时控制飞行轨迹所必须的。
根据式(2.7)中的系统矩阵A,用Matlab可求出开环系统的5个特征根为:,,,,。可知系统存在一个正实数的极点,该极点对应的模态为短周期模态,对应的状态为快变量,此极点说明高超声速飞行器纵向模型是不稳定的,这样设计的目的是为了提高飞行机动性能。高超声速飞行器在低速飞行时,开环特性是稳定的,但随着马赫数的增加,开环特性趋于不稳定。事实证明,马赫数越高,不稳定极点个数有增加的趋势。同时系统存在一个几乎和原点重合的极点,该极点对应状态量h,这表明高度的变化引起的空气密度和静压的变化较小。此外,系统还存在一对很特殊的极点,这对极点非常靠近虚轴,该类极点对应慢变状态,对应的模态为长周期模态,表明高超声速飞行器具有一种缓慢的飞行航迹振荡特性。由于高超声速飞行器纵向模型是不稳定的系统,若不对其进行控制,系统则毫无意义,必须要设计控制器使其稳定且有较好的性能。
3.1 极点配置理论依据
控制系统的性能主要取决于系统极点的位置,它包含了系统的稳定性、周期、阻尼等动态特性信息。作为系统性能指标的一种形式,往往是给出一组期望极点。而极点配置就是对于给定对象的状态模型,通过选择状态反馈矩阵,使闭环系统的极点配置到期望的极点位置上,以便获得所需要的较好的动态性能。
并得到相应的阶跃响应如下图(相关Matlab程序见附录):
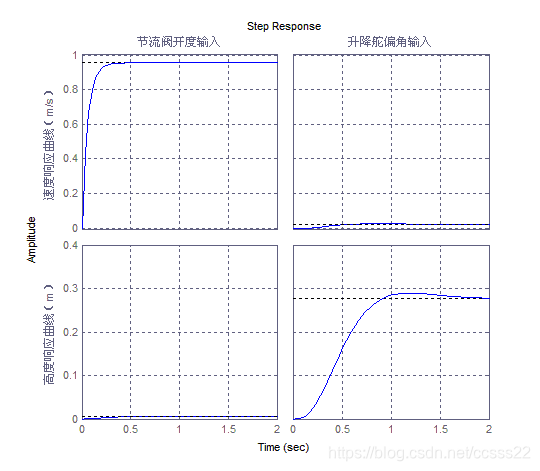
图3.2 两个输入分别对系统阶跃所产生的响应
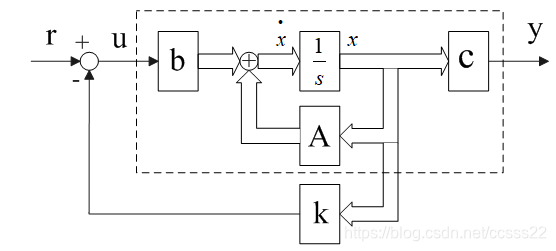
状态反馈一般不能跟踪输入指令,若输出负载有轻微的扰动则将不能跟踪输入,下面为保证输出跟踪输入指令,引入了相应的内模模块,实际上还应该加入相应的增益使之保持稳定,这里为方便起见设增益为1。将上述k矩阵代入状态反馈,得到下面仿真结构图:

以上结构图中的A,B,C,k均为矩阵,分别对速度和高度进行阶跃响应,取,。仿真后得到速度响应曲线与高度响应曲线的仿真图:
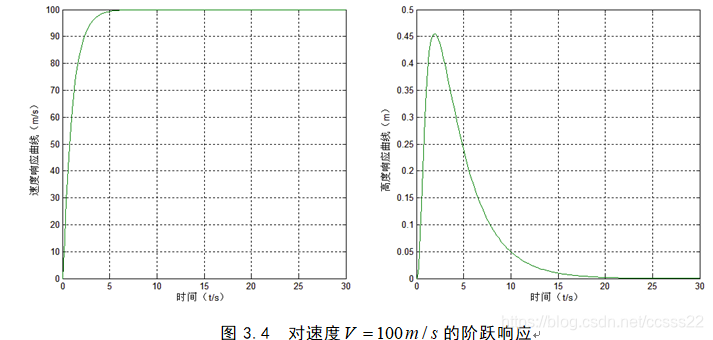
从上述组图中可以得出以下结论:
(1)分别对速度和高度进行阶跃响应与速度和高度同时对系统进行阶跃响应所得出的仿真结果基本相同,这也再次验证了节流阀开度对速度起主导作用,升降舵偏角对高度起主导作用。但是极点配置后的系统一般不能跟踪输入,需要引入积分器才能使系统无静差,但加入积分器势必会导致系统动态性能变差,甚至使系统不稳定。
(2)期望闭环极点的位置综合反映了响应速度和干扰及噪声的敏感度,即提高系统响应速度,则干扰和噪声的影响通常会增加,这就需要根据实际系统的需要权衡利弊,并且反复试凑比较得出期望极点的位置。
(3)系统进行极点配置后,首先系统是稳定的,阶跃响应曲线也较好,但这取决于闭环极点的位置,因为闭环极点决定着响应速度,而闭环极点的选取需要多次试凑才能得到较为满意的结果,因此极点配置方法具有一定的盲目性。
本文针对高超声速飞行器纵向模型,分别进行了极点配置,LQR控制器和控制器的设计,并给出了相应的仿真及其性能分析。三种控制器的侧重点各有不同:极点配置法能很直观的在系统完全能控前提下任意将系统极点配置到期望的极点,通过试凑法以使系统达到预期的性能,然而这种方法有较大的局限性,一般难以实现各种苛刻的性能指标;线性二次(LQR)最优控制是用最小的能量使系统性能达到“最优”,通过调整Q阵和R阵便能达到预期目标,尤其在对性能要求较高的场合有着广泛的应用,但从上文我们也可得知,它对干扰的抑制不是很好;控制器的一个侧重点在于其抗干扰性,从上文中我们也可得知其抗干扰能力很强,而动态性能略低于LQR控制器。
综上所述,以上三种控制方法各有所长,不存在真正意义上的“最优”控制器,动态性能和抗干扰性能是存在矛盾的,良好的动态性能往往是要牺牲抗干扰性作为代价,从上文也能得到验证,只有深入了解系统本身的特性,并根据实际情况才能设计出符合要求的控制器。