3种起动方式: Y→∆换接起动、自耦变压器减压起动、定子回路串电抗起步;
3种调速方式: 电阻调速、电压调速、变频调速;
3种制动方式: 能耗制动、反接制动、变频器回馈制动。
目录
0 电机参数与负载情况
为了方便解释起动、调速、制动过程,以某鼠笼式三相异步电机为例。
电机铭牌参数
UN=380 V、IN=30 A、PN=15 kW、nN=1460 r/min、功率因数cos∅=0.86、过载能力λT=2.3、效率 η=90.6%
折算到电机轴上的负载转矩
TL1=70.56 N∙m
1 起动
在计算起动方式时,主要考察起动转矩、起动电流是否符合要求。
1.1 Y→∆换接起动
首先验证起动转矩是否符合要求,用Y→∆ 换接减压起动时,起动电流和起动转矩都降为直接起动的1/3,则:

因为Tst'>TL1,起动转矩能满足。
接下来验证起动电流,

故:换接起动能减小起动电流,符合要求。
1.2 自耦变压器减压起动
采用自耦变压器减压起动与直接起动相比较,电压降低到1/k,起动电流和起动转矩都降低到全压起动时的1/k^2。
选择自耦变压器QJ3。QJ3型的3各抽头分别为电源电压的40%、60%、80%。分别验算转速、转矩:
选用40%抽头时:k=2.5
转速符合要求、转矩不符合要求,故:不能选用抽头电压40%的自耦变压器。
选用60%抽头时:k=1.667

转速、转矩都符合要求。可以选择抽头电压60%的自耦变压器进行减压起动。
下面使用matlab对电动机自耦变压器减压起动进行仿真:
开始时将变压器60%抽头接入,使用breaker模块,在某个时刻切除变压器,分别对应60%电压和全电压。

|
|
|
| 直接起动 |
变压器自耦启动 |


1.3 定子回路串电抗起动

直接在定子回路串联电阻会导致能量损耗较大,对于容量较大的电动机可以串电抗起动。由于在实际的电梯起动中,不希望出现过大的加速度,所以可以采用这种起动办法来降低加速度,获得一个比较好的速度曲线。
启动时将电抗器接入定子回路,当转速升高到一定数值时,再把开关闭合,切断电抗器,全压运行。从结果可以看出,用这种方法起动时,大大降低了起动加速度,起动转矩和起动电流都降低了,起动转矩能够满足正常起动需求。是一种比较合适的方法。

|
|
|
| 直接起动 |
定子回路串电阻起动 |


2 调速
2.1 电阻调速
鼠笼式三相异步电机,不能像绕线式异步电机那样在转子串电阻调速。
2.2 电压调速
当改变电动机的定子电压时,可以得到一组不同的机械特性曲线,从而获得不同转速。由于电动机的转矩与电压平方成正比,因此最大转矩下降很多,其调速范围较小,一般不使用。
2.3 变频调速
恒电压频率比,将负载代入到实用表达式中:
![]()

解得:s=0.01876
根据三相异步电动机速度表达式:
如果此时要求电机转速为1150r/min,则 f1=39 Hz
即,给出想要的运行转速,可以计算出调频大小,一般都是在额定频率之下的范围内使用。现在采用SPWM变频调速,它的好处是调速范围很大,而且可以在调频的同时调压。方法是把前面计算出的 f1 设置为正弦调制信号的频率,与3000-5000Hz的等腰三角载波进行调制,得到调频SPWM波形,控制三相桥式逆变器中IGBT的通断,从而在逆变器输出端获得具有一定幅值和频率的交流电压。从结果来看,转速基本准确,转速有波动,这是由于整流输出后经过滤波器,滤波效果不是特别完美。


3 制动
3.1 能耗制动
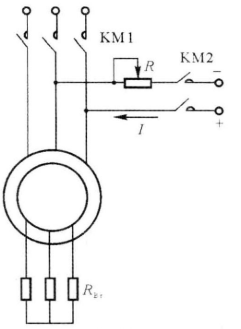
制动时,KM1 断开,电机脱离电网,同时KM2 闭合,在定子绕组中通入直流励磁电流,直流励磁电流产生一个恒定的磁场,因惯性继续旋转的转子切割恒定磁场,转子中感应出感应电动势和电流。感应电流与磁场作用产生的电磁转矩为制动性质,转速迅速下降,当转速为零时,感应电动势和电流为零,制动过程结束,转子的动能转变为电能消耗在转子回路的电阻上。
拖动位能性负载,必须在制动到n=0时切断电源或者制动钳抱闸,及时停车,否则将会在位能性负载的拖动下反转。


3.2 反接制动
鼠笼式异步电机可以定子两相反接制动;
绕线式异步电机可以转速反向反接制动。
3.3 变频器回馈制动
对于变频调速,电动机的降速和停车完全可以通过逐渐减小频率来实现。在频率减小的瞬间,电动机的同步转速下降,由于机械惯性,电动机的转子转速未变,它的转速变化是有一定时间滞后的,这时会出现实际转速大于给定转速,从而产生电动机反电动势e高于变频器直流端电压u的情况,即e>u。这时电动机就工作在发电状态;电机轴上的转矩变成了制动转矩,使电机的转速迅速下降,电机处于再生制动状态。
在matlab中仿真,变频器原始频率32Hz,拖动位能性负载,在0.3s时刻降为5Hz,制动到转速为0时切断抱闸,完成制动。从结果可以看出,在0.3s时刻,突然降低变频器频率,出现了一段负值的制动转矩,时电机轴制动,与理论分析相符合。但是制动的加速度很大,如果给变频器设定一个降频曲线,让频率平滑地降低,可以控制加速度。


参考资料
[1] 卢健康.电机与电力拖动简明教程[M].西北工业大学出版社:西安,2012.3
[2] 洪乃刚.电力电子和电力拖动控制系统的MATLAB仿真[M].机械工业出版社:北京,2006.1