文章目录
linux-arm开发板在引出USB接口的时候,可外接U盘、键鼠等USB设备。同时,单片机开发中常用CH340芯片进行TTL转USB从而连接windows下的COM口,那么linux-arm开发板如何也能像电脑一样,插入TTL转USB模块后通过USB与TTL电平通讯呢?
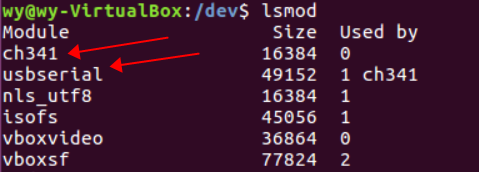
回答这个问题的关键就是驱动,首先linux-arm开发板要有usbserial驱动,再次要安装ch340针对linux系统的专有驱动。一般PC机的Ubuntu系统内核中已经默认加载了usbserial、ch34x这两个驱动,从而插上TTL转USB模块就可以用minicom之类的软件进行串口通信,插入TTL转USB模块后,在Ubuntu中lsmod查看已载入的驱动,如下所示,此时已经可以直接写程序或者利用minicom进行串口通信了。
可惜的是,在我的linux-arm开发板上,并没有这两个驱动中的任何一个=_=。如此一来,只能再次“被迫学习”了,而且为了更好的学习下驱动移植,这次还特意走了一下弯路。
一、安装usbserial驱动
开发板中之所以没有这个驱动,是因为在编译内核时没有选择它。解决这个问题有两个方法——1、重新编译内核,然后烧写到开发板中;2、通过内核裁剪单独编译该驱动,生成.ko文件后自己动态加载。显然,我为了获取usbserial这一个驱动,没有必要重新编译、烧写内核,方法2是最佳的选择。
1.获得usbserial驱动
在Ubuntu中进入开发板的内核源码目录,执行make menuconfig进行内核配置。选择Device Drivers按回车进入。

然后选择USB support按回车进入

然后选择USB Serial Converter support,按空格修改编译标志,*标识意为编译到内核,M标识以为该功能作为内核模块编译。这里我们选择M,这样将生成ko驱动以便于我们后期移植、加载。然后按回车进入。

选择USB Generic Serial Driver,这个是一切USB转串口的前提,所以必须选择。然而在此处,我们可以看到红框处已经支持了CH341芯片,我们选择后将直接生成ch34x.ko驱动。然而为了学习通过源码生成驱动,这里我们忍痛不选。

选择完成后进行save,然后退出内核配置界面,到内核源码界面下进行make modules编译在内核配置中标志为M的驱动。
make ARCH=arm CROSS_COMPILE=arm-himix200-linux- modules -j 20
ARCH=arm CROSS_COMPILE=arm-himix200-linux-是指明要针对ARM系统进行交叉编译。运行命令后可以看到usbserial.ko驱动已经在对应目录生成了。

2.加载usbserial驱动
到内核目录下的drivers/usb/serial/下将usbserial.ko文件复制到开发板中,然后执行insmod usbserial.ko,lsmod可以看到驱动被成功加载。若提示权限不够,可先进行chmod 777 usbserial.ko试一下。

二、安装ch340驱动
前边说了,其实我的4.9.37版本的linux内核中已经支持ch340编译了。然而既然沁恒微官网给出了ch340的源码,说明存在需要手动编译驱动的可能,比如较老版本的内核,比如驱动制作出重大更新等等。
1.获得ch340驱动源码
直接去官网下载之http://www.wch.cn/download/CH341SER_LINUX_ZIP.html,解压后是如下三个文件。

2.编译ch340驱动源码,生成ko驱动
这里要注意,我们编译的ko驱动是针对我们开发板的,这就使得在编译时要用与开发板中一致的内核进行编译,同时编译选项要使用针对arm体系的交叉编译。
我们打开Makefile文件,可以看到内核路径KERNELDIR被配置为当前PC机中Ubuntu的内核路径,这显然不行。我们需要将其设置为开发板内核源码的路径。
KERNELDIR := /home/wy/Hi3516/rp-hi3516dv300-busybox/osdrv/opensource/kernel/linux-4.9.y-smp
然后使用交叉编译make之
make ARCH=arm CROSS_COMPILE=arm-himix200-linux-
编译完成后,在当前目录下就生成我们所需的ch34x.ko文件了

3.加载ch340驱动
复制到开发板后insmod ch34x.ko,加载后lsmod查看发现驱动载入成功。

同时插入USB转串口模块后,在开发板/dev下也弹出了ttyUSB0设备,这个设备就是插入的USB转串口模块。

三、编写程序验证驱动能否正常使用
既然在/dev目录下生成了ttyUSB0,之后的操作就显而易见了——还是open、close、read、write、ictol那一套。我们编写一个简单的程序,验证一下。如下所示,默认波特率为9600,每隔一秒向USB转串口模块发送一句"this is a Linux USB dev test!"
#include <stdlib.h>
#include <stdio.h>
#include <sys/fcntl.h>
int main()
{
int fd = open("/dev/ttyUSB0",O_RDWR);
char *buf = "this is a Linux USB dev test!";
printf("fd=%d\n",fd);
while(1)
{
write(fd,buf,strlen(buf));
usleep(1000000);
}
}
将程序编译并放入开发板中,将USB转串口模块通过tx、rx、gnd三根线练到另一个连在windows下的USB转串口模块中,运行测试程序。发现两模块的tx、rx灯正常闪烁,说明有数据收发,在windows下打开串口助手,接收正常。
