是否ubuntu上安装东西都有两种方式
一种直接比如apt-get /pip (也叫二进制安装?)确实是叫二进制安装,下面拍自《ROS机器人开发实践》

https://blog.csdn.net/sinat_16643223/article/details/107710249

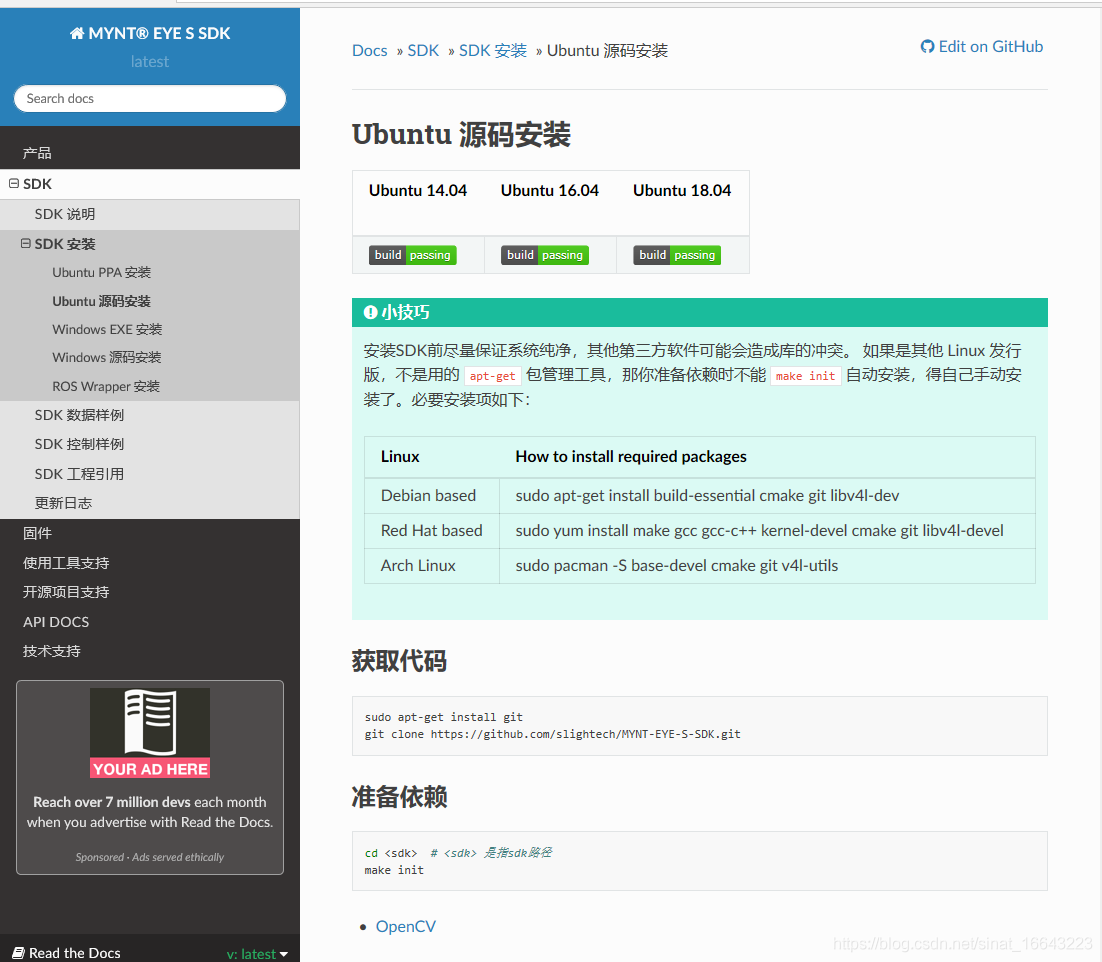
另一种源码编译?
像这种没用提供二进制安装包的,就需要采用源码编译的方式进行安装。



是否就像飞控固件,你可以源码编译也可以直接烧录hex文件?
我看T265的SDK有这两种方式,ROS功能包也是有这两种方式
好像linux确实是有几种安装软件的方式,其中之一就是源码安装。华清应该之前讲过
而且源码编译确实好像要make ,那个你之前也看到cmake了吧,好像是T265里面的 ROS功能包他们好像都是用的catkin编译。这个是在T265的ROS功能包和那个VIO的ROS功能包的教程里都看到了,那个VIO的ROS功能包只给的源码编译这一种方式,T265的给了两种方式包括源码编译。小觅的我记得也是从Github上下源码下来编译安装的,是的,用的make。
不过单单T265 SDK的安装大家似乎用的是apt-get的方式,源码的安装方式也有但是别人不推荐,但是,好像在树莓派上只能源码编译。
真的弄明白了这个,你再看小觅的SDK或者ROS功能包安装教程,T265的SDK或者ROS功能包安装教程,那个PX4官方的VIO的ROS功能包的安装教程,都清楚了!!!!!!知道为什么会有几种方法,真的感觉通了一样,再叫我看一个设备的SDK在ubuntu上的安装教程,我的思路应该也是很清晰的!!!!!!!我不看就应该知道大体是什么样的了,再叫我看ZED的SDK或者ROS功能包的安装教程我也应该能够很快上手了,我现在感觉都可以直接买T265了,不用担心不会用,其他硬件摄像头我也应该可以有信心买来用,不会说教程看不懂SDK不会用什么的。可能ubuntu上的SDK的安装使用方法都逃不出这两种,可能OZO的SDK也是如此!!!!!一通百通,大不了源码编译嘛。
github的用法是不是就是把源码下下来然后编译安装。git clone 是不是以后不会说看到别人的github不会用了,你以前确实是的,看到Github那么一大堆文件,其实只用下下来进入文件夹后make一下就好了。
https://www.cnblogs.com/caodneg7/p/10053978.html

https://blog.csdn.net/wxyf2018/article/details/102847399

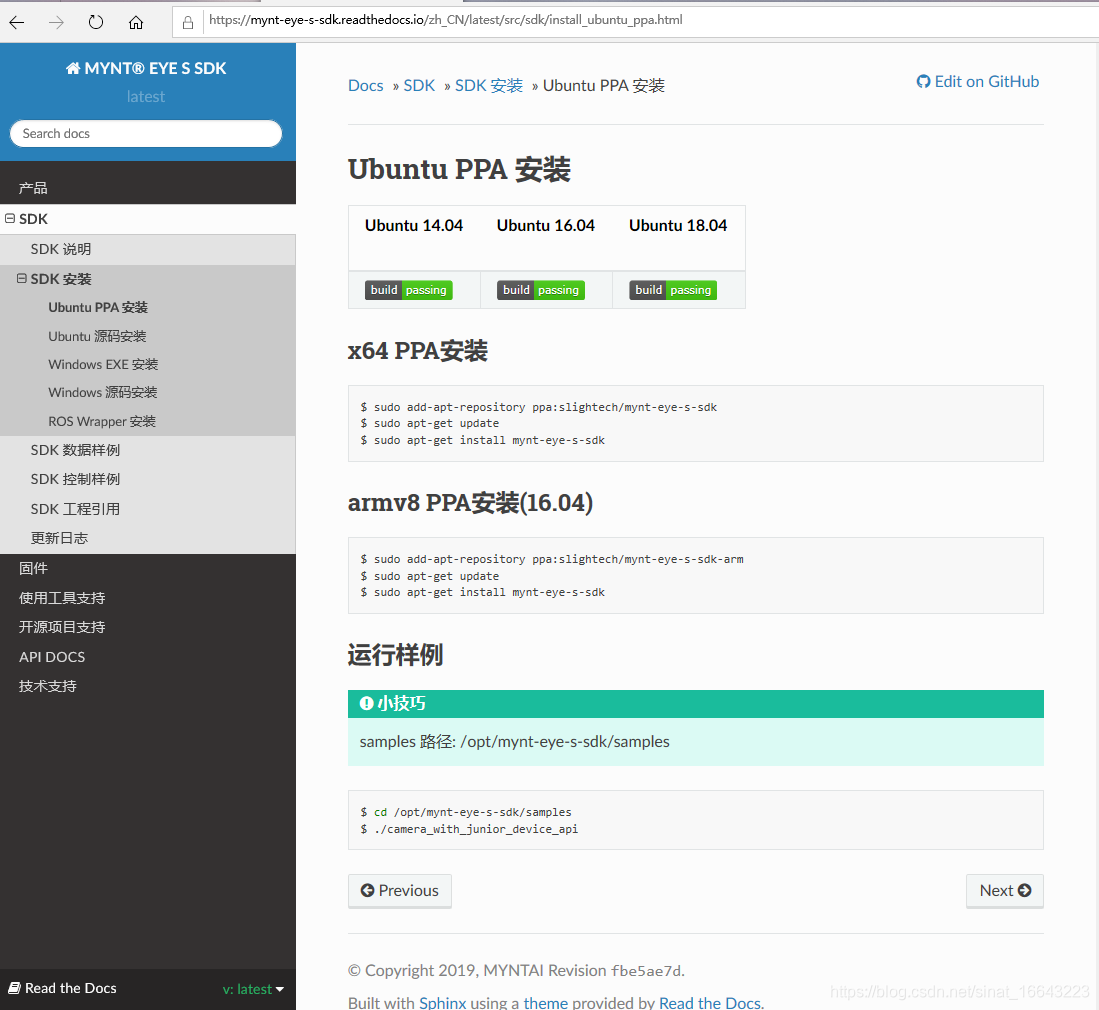
我发现小觅单纯的SDK安装也是分为两种,一种直接安装,一种源码安装!!!!!!!!这里写得很清晰!!!!!
直接安装确实要分平台。
https://mynt-eye-s-sdk.readthedocs.io/zh_CN/latest/src/sdk/install_ubuntu_ppa.html
https://github.com/IntelRealSense/realsense-ros

https://blog.csdn.net/sinat_16643223/article/details/107511254


https://blog.csdn.net/sinat_16643223/article/details/107710249

MAVROS也是ROS的一个功能包,安装也分为两种方式,二进制安装和源码编译。
截图自ZN无人机课程的一个教程
